用于組合導(dǎo)航系統(tǒng)的三軸地磁導(dǎo)航傳感器設(shè)計(jì)
2020-04-30 06:49:45金海紅吳東升范之國
無線互聯(lián)科技 2020年6期
金海紅 吳東升 范之國
摘 ? 要:文章針對(duì)仿生偏振光/地磁/慣導(dǎo)多源信息組合導(dǎo)航系統(tǒng)中的地磁導(dǎo)航需求,設(shè)計(jì)了一種三軸地磁導(dǎo)航傳感器。介紹了應(yīng)用背景、設(shè)計(jì)需求與實(shí)現(xiàn)方法,進(jìn)行了系統(tǒng)的誤差分析,并針對(duì)不同誤差來源,進(jìn)行了標(biāo)定測(cè)量與補(bǔ)償,實(shí)現(xiàn)了三軸姿態(tài)角的動(dòng)態(tài)測(cè)量,為多信息源融合下的導(dǎo)航系統(tǒng)提供了一種獲取地磁導(dǎo)航信息的有效手段。
關(guān)鍵詞:磁阻傳感器;地磁導(dǎo)航;加速度計(jì);組合導(dǎo)航
1 ? ?導(dǎo)航技術(shù)
導(dǎo)航技術(shù)在航空、航天、航海等領(lǐng)域是不可或缺的關(guān)鍵技術(shù)。地磁導(dǎo)航是利用地球磁場(chǎng)矢量來確定方向的一種古老導(dǎo)航方法,如今,仍然在很多場(chǎng)合發(fā)揮著重要的作用。但是,地磁導(dǎo)航也存在容易受到外界環(huán)境干擾等諸多不足,因此,設(shè)計(jì)抗干擾性強(qiáng)的地磁傳感系統(tǒng)和有效的誤差控制方法,是各種地磁導(dǎo)航應(yīng)用的關(guān)鍵。隨著組合導(dǎo)航技術(shù)的不斷發(fā)展,多信息源組合導(dǎo)航越來越凸顯其技術(shù)優(yōu)勢(shì)[1]。仿生偏振光導(dǎo)航通過對(duì)大氣偏振模式的檢測(cè)和演算,實(shí)現(xiàn)對(duì)載體姿態(tài)信息的判斷,是一種自主導(dǎo)航方法[2]。仿生偏振光導(dǎo)航、地磁導(dǎo)航與慣性導(dǎo)航三者導(dǎo)航方式優(yōu)勢(shì)互補(bǔ)[3-4],可以構(gòu)成組合自主導(dǎo)航系統(tǒng),為解決衛(wèi)星信號(hào)拒止環(huán)境下的自主導(dǎo)航,提供了一種可行的技術(shù)途徑。
本文針對(duì)仿生偏振光/地磁/慣導(dǎo)多源信息組合導(dǎo)航系統(tǒng)中的地磁導(dǎo)航需求,設(shè)計(jì)了一種基于磁阻技術(shù)的三軸地磁導(dǎo)航傳感器,為多信息源融合下的自主導(dǎo)航系統(tǒng)提供一種有效的地磁導(dǎo)航輔助信息。組合導(dǎo)航系統(tǒng)集成了偏振光、地磁、慣性導(dǎo)航傳感器,是以核心信號(hào)處理與控制單元為中心,將各導(dǎo)航傳感器送來的信息加以綜合和最優(yōu)化處理,然后對(duì)導(dǎo)航參數(shù)進(jìn)行綜合輸出。其中,組合導(dǎo)航系統(tǒng)中的地磁導(dǎo)航傳感器利用地球磁場(chǎng)通過自身的磁強(qiáng)計(jì)測(cè)量載體所在位置的地磁場(chǎng)矢量,計(jì)算出相應(yīng)載體的三軸姿態(tài)。根據(jù)平臺(tái)系統(tǒng)的成本、體積及使用范圍等綜合考慮,本文地磁導(dǎo)航傳感器系統(tǒng)的設(shè)計(jì)要求為:實(shí)現(xiàn)三軸姿態(tài)實(shí)時(shí)動(dòng)態(tài)測(cè)量。其中,航向角輸出絕對(duì)精度為2 o;俯仰角及橫滾角在﹣60~+60 o的范圍內(nèi)的輸出絕對(duì)精度為1 o。
2 ? ?地磁導(dǎo)航傳感器的硬件設(shè)計(jì)
2.1 ?三軸姿態(tài)信息獲取
地磁傳感器的實(shí)現(xiàn)方式有線圈式、磁通門式、霍爾式、磁阻式等多種,目前采用最多的是磁通門式和磁阻式兩種。磁阻式傳感器因其全固態(tài)、內(nèi)部無轉(zhuǎn)動(dòng)部件、尺寸小、抗干擾性強(qiáng)等特點(diǎn)得到廣泛應(yīng)用[5-6]。因此,本系統(tǒng)采用磁阻式設(shè)計(jì)三軸地磁導(dǎo)航傳感器。
地磁傳感器主要是利用磁阻效應(yīng)感測(cè)地球磁場(chǎng)來確定羅盤航向。選用霍尼韋爾公司的各向異性磁阻傳感器HMC1052,HMC1051Z組合作為三軸地磁傳感器。HMC1052測(cè)量地球磁場(chǎng)在X,Y軸的分量,HMC1051Z測(cè)量地球磁場(chǎng)Z軸分量。每個(gè)電橋輸出是一個(gè)與感測(cè)磁場(chǎng)強(qiáng)度和電橋電壓成正比的差動(dòng)輸出電壓信號(hào),分別用Vx,Vy和Vz表示,該信號(hào)經(jīng)放大后送入微處理器,進(jìn)行模數(shù)轉(zhuǎn)換及數(shù)據(jù)處理。采用ADI的雙軸加速度計(jì)ADXL202,任何方向的加速度都會(huì)使ADXL202內(nèi)部的多晶硅結(jié)構(gòu)偏移,使得中心極板產(chǎn)生電壓變化,其幅值與該測(cè)量軸的加速度成正比,微處理器計(jì)算加速度計(jì)中X與Y軸上輸出信號(hào)占空比ηX和ηY,利用式(1—2)即可得到俯仰角(θ)與橫滾角(),式中,η0為水平占空比,S為靈敏度[5]。
(1)
(2)
當(dāng)傳感器處于水平放置時(shí),航向角α可用式(3)計(jì)算:
(3)
大多數(shù)情況下傳感器并不是在水平面上,此時(shí),需要利用加速度計(jì)測(cè)得的傾角,對(duì)非水平姿態(tài)下的航向角進(jìn)行傾角修正,如式(4—5)所示,其中,XH和YH為折算到水平面上的X軸與Y軸的磁場(chǎng)強(qiáng)度:
(4)
(5)
通過傾角計(jì)算、坐標(biāo)變換得到的地磁航向角,再經(jīng)過修正得到地理航向角,如式(6—7)所示,其中,α'地理航向角,β為磁偏角[5]。
(6)
(7)
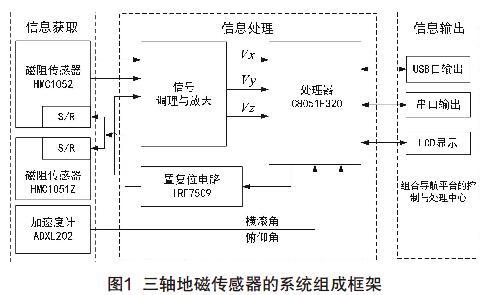
最后,姿態(tài)信息以數(shù)字輸出的形式通過串口/USB送至導(dǎo)航系統(tǒng)中的控制與處理中心,可以通過LCD液晶顯示屏實(shí)時(shí)顯示,系統(tǒng)組成框架如圖1所示。
2.2 ?電路設(shè)計(jì)
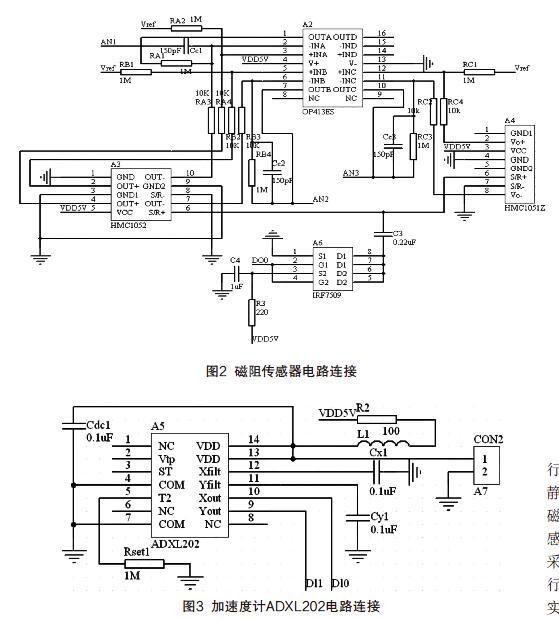
為了方便調(diào)試與功能擴(kuò)展,三軸地磁導(dǎo)航傳感器采用子母板的層疊設(shè)計(jì)方式。子板由C8051F320控制的傳感器獨(dú)立功能模塊組成,主要包括磁阻傳感器電路和ADXL202加速度計(jì)電路,電路設(shè)計(jì)如圖2—3所示。母板主要包括電源、各種調(diào)試與功能擴(kuò)展接口等電路。
電源是系統(tǒng)可靠穩(wěn)定運(yùn)行的關(guān)鍵因素之一,系統(tǒng)設(shè)計(jì)了模擬電源、數(shù)字電源和備用電源。根據(jù)系統(tǒng)負(fù)載情況,數(shù)字和模擬電源選用線性穩(wěn)壓器件實(shí)現(xiàn),提供3.3 V,2.5 V等多種穩(wěn)壓電源。如圖3所示,兩路主電源的輸入端經(jīng)電壓比較器控制電源繼電器的通斷,并將此控制信號(hào)輸入MCU的I/O口,告知MCU電源狀況,如果主電源的任意一路掉電則會(huì)自動(dòng)切換備用電源,備用電源系統(tǒng)是在主電源缺失情況下的應(yīng)急電源,也是電池電源系統(tǒng)。
3 ? ?導(dǎo)航傳感器系統(tǒng)的軟件設(shè)計(jì)
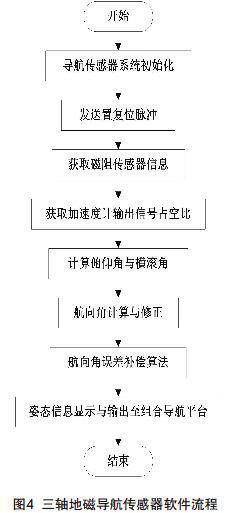
導(dǎo)航傳感器系統(tǒng)軟件的主要任務(wù)是通過對(duì)硬件系統(tǒng)的控制,獲取傳感器信息,進(jìn)行信號(hào)處理,輸出傳感器獲取的三軸姿態(tài)信息。采用模塊化設(shè)計(jì),分為主程序和各功能模塊子程序。主程序負(fù)責(zé)整個(gè)系統(tǒng)對(duì)子程序的響應(yīng)和調(diào)用,有效地管理系統(tǒng)軟、硬件資源。子程序完成指定功能,并供主程序調(diào)用,主要包括初始化、磁阻傳感器信號(hào)采集與濾波、加速度計(jì)信號(hào)獲取、傾角信息計(jì)算、航向角計(jì)算與誤差補(bǔ)償、顯示與發(fā)送等,總體流程如圖4所示。
導(dǎo)航傳感器開始工作后,首先,進(jìn)行系統(tǒng)初始化,包括系統(tǒng)軟硬件資源和靜態(tài)工作參數(shù)等信息的配置;其次,向磁阻傳感器發(fā)送置/復(fù)位脈沖,對(duì)磁阻傳感器與加速度計(jì)的實(shí)時(shí)信息進(jìn)行數(shù)據(jù)采集、濾波,再進(jìn)行姿態(tài)解算;再次,運(yùn)行誤差補(bǔ)償算法;最后,將系統(tǒng)獲得的實(shí)時(shí)姿態(tài)信息輸出至組合導(dǎo)航系統(tǒng)中的控制與處理中心。另外,傳感器失調(diào)、溫度漂移以及硬鐵和軟鐵干擾會(huì)造成誤差,將傳感器在置位和復(fù)位情況下得到的信號(hào)求平均值,即可得到由于失調(diào)和漂移造成的直流偏置信號(hào),在航向角計(jì)算前對(duì)該偏置信號(hào)進(jìn)行補(bǔ)償即可消除其影響。
4 ? ?系統(tǒng)的誤差分析與標(biāo)定
4.1 ?誤差分析
在地磁導(dǎo)航傳感器通過軟硬件調(diào)試后,能夠?qū)崿F(xiàn)姿態(tài)感知的功能,但是由于制造、安裝和環(huán)境的影響,姿態(tài)信息存在很大誤差,影響導(dǎo)航的精度及穩(wěn)定性,需要分析影響傳感器穩(wěn)定性和精度的誤差因素。
造成地磁導(dǎo)航傳感器誤差的原因主要包括兩類[6-7]。一類是系統(tǒng)自身存在的誤差,包括制造誤差、安裝誤差;另一類是由傳感器使用環(huán)境因素造成的系統(tǒng)環(huán)境誤差。對(duì)于第一類誤差,可通過硬件手段和系統(tǒng)合理的標(biāo)定,使誤差控制在一定范圍內(nèi)。在保證芯片篩選、垂直安裝、信號(hào)隔離等措施之后,對(duì)系統(tǒng)測(cè)量結(jié)果影響最大的就是傳感器的基準(zhǔn)電壓和加速度計(jì)中的X,Y軸的水平占空比η0與靈敏度S等參數(shù),需要進(jìn)行系統(tǒng)的標(biāo)定測(cè)量,以確定其具體數(shù)值。對(duì)于第二類誤差,需要通過相應(yīng)的誤差補(bǔ)償算法來降低系統(tǒng)環(huán)境所導(dǎo)致的影響,可采用自差粗校正法、粒子群優(yōu)化、最小二乘補(bǔ)償?shù)确椒╗7-9]。本文針對(duì)基準(zhǔn)電壓與加速度計(jì)中的參數(shù),進(jìn)行實(shí)際標(biāo)定測(cè)量。
4.2 ?標(biāo)定方法與結(jié)果
磁阻傳感器中放大器的參考電壓設(shè)計(jì)了2.5 V基準(zhǔn),但實(shí)際電路存在一定偏差。為了找到實(shí)際的X,Y軸的基準(zhǔn)電壓,要進(jìn)行基準(zhǔn)電壓的標(biāo)定。將傳感器固定在高精度水平旋轉(zhuǎn)轉(zhuǎn)臺(tái)上,每隔10°測(cè)量X,Y軸由單片機(jī)模數(shù)轉(zhuǎn)換后的電壓采樣值,對(duì)磁阻傳感器的水平軸輸出電壓量進(jìn)行大量反復(fù)測(cè)量實(shí)驗(yàn)。最后,標(biāo)定出水平軸X,Y軸基準(zhǔn)電壓分別為:Vrefx=2 345 mV,Vrefy=2645 mV。圖5為實(shí)驗(yàn)室無設(shè)備干擾(停電)情況下的一次測(cè)量結(jié)果。
加速度計(jì)中的參數(shù)也要進(jìn)行標(biāo)定。首先,標(biāo)定X軸參數(shù),測(cè)得一個(gè)正向重力加速度時(shí)的占空比54.2%,測(cè)得一個(gè)反向重力加速度時(shí)的占空比32.2%,靈敏度SX=(54.2%﹣32.2%)÷2 g=11%/g。因此,傳感器水平放置不承受加速度時(shí)的X軸水平占空比η0X=54.2%﹣11%=43.2%。其次,標(biāo)定Y軸參數(shù),測(cè)得正向重力加速度時(shí)的占空比62%,反向重力加速度時(shí)的占空比如40%,靈敏度SY=(62%﹣40%)÷2 g=11%/g,Y軸水平占空比η0Y=62%﹣11%=51%。上述加速度計(jì)參數(shù)的標(biāo)定也需要經(jīng)過多次反復(fù)的測(cè)量,最終完成標(biāo)定,并將X,Y軸水平占空比和靈敏度的標(biāo)定值代入式(1—2)中。在對(duì)加速度進(jìn)行標(biāo)定后,測(cè)得傾角信息的實(shí)驗(yàn)顯示在-60~+60 o的有效測(cè)量范圍內(nèi),俯仰角及橫滾角的絕對(duì)誤差均不超過1 o,達(dá)到了設(shè)計(jì)要求。
針對(duì)環(huán)境誤差對(duì)航向角的影響,導(dǎo)航系統(tǒng)對(duì)傳感器信號(hào)采用橢圓誤差補(bǔ)償算法進(jìn)行實(shí)時(shí)誤差補(bǔ)償,航向角的一次測(cè)量結(jié)果如圖6所示,補(bǔ)償后的最大絕對(duì)誤差小于2 o,平均誤差為1.27 o,誤差標(biāo)準(zhǔn)差1.35 o。
5 ? ?結(jié)語
本文設(shè)計(jì)了一種基于磁阻技術(shù)的三軸地磁導(dǎo)航傳感器系統(tǒng),介紹了其應(yīng)用背景與設(shè)計(jì)要求、實(shí)現(xiàn)與誤差分析方法,并進(jìn)行了標(biāo)定和誤差補(bǔ)償。實(shí)測(cè)結(jié)果表明,本文設(shè)計(jì)的三軸地磁導(dǎo)航傳感器系統(tǒng)實(shí)現(xiàn)了航向角、俯仰角和翻滾角的動(dòng)態(tài)測(cè)量,達(dá)到了仿生偏振光/地磁/慣導(dǎo)多源信息組合導(dǎo)航系統(tǒng)對(duì)地磁導(dǎo)航傳感器的指標(biāo)要求,為多源信息融合下的自主導(dǎo)航系統(tǒng)提供一種獲取地磁導(dǎo)航輔助信息的有效手段。
[參考文獻(xiàn)]
[1]李鎮(zhèn),王海涌,靳宇航,等.一種彈道導(dǎo)彈捷聯(lián)慣導(dǎo)/地磁組合導(dǎo)航方法[J].中國慣性技術(shù)學(xué)報(bào),2015(5):636-641.
[2]高雋,范之國.仿生偏振光導(dǎo)航方法[M].北京:科學(xué)出版社,2014.
[3]盧鴻謙,尹航,黃顯林.偏振光/地磁/GPS/SINS組合導(dǎo)航方法[J].宇航學(xué)報(bào),2007(4):897-902.
[4]朱占龍,單友東,楊翼,等.基于信息正交性自適應(yīng)濾波的慣性/地磁組合導(dǎo)航方法[J].中國慣性技術(shù)學(xué)報(bào),2015(1):66-70.
[5]楊曉東,王煒.地磁導(dǎo)航原理[M].北京:國防工業(yè)出版社,2009.
[6]GOLDENBERG F.Geomagnetic navigation beyond the magnetic compass[C].San Diego:Position Location & Navigation Symposium IEEE/ION. IEEE,2006.
[7]王齊賢,李東光.基于粒子群優(yōu)化的地磁傳感器非對(duì)準(zhǔn)誤差校正方法[J].探測(cè)與控制學(xué)報(bào),2019(5):11-16,24.
[8]WAHDAN A,GEORGY J,ABDELFATAH W F.Magnetometer calibration for portable navigation devices in vehicles using a fast and autonomous technique[J].IEEE Transactions on Itelligent Transportation Systems,2014(5):2347-2352.
[9]方旭,王良明.地磁傳感器標(biāo)定方法研究及數(shù)值模擬[J].彈箭與制導(dǎo)學(xué)報(bào),2018(1):73-76.
Design of three axis geomagnetic navigation sensor for integrated navigation system
Jin Haihong1, Wu Dongsheng1, Fan Zhiguo2
(1.School of Electronic and Information Engineering, Anhui Jianzhu University, Hefei 230601, China;
2.School of Computer Science and Information Engineering, Hefei University of Technology, Hefei 230601, China)
Abstract:In this paper, a three-axis geomagnetic navigation sensor is designed to meet the needs of geomagnetic navigation in the multi information source integrated navigation system of bionic polarized light, geomagnetic and inertial navigation. The application and design requirements and implementation methods are introduced. The error analysis of the system is carried out, and the calibration measurement and compensation are carried out according to different error sources. The dynamic measurement of the three-axis attitude angle is realized, which provides an effective means to obtain the geomagnetic navigation information for the navigation system under the fusion of multiple information sources.
Key words:magnetoresistive sensor; geomagnetic navigation; accelerometers; integrated navigation
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45