一種基于航天器通用下行信號相關(guān)處理的干涉測量方法及驗證
2020-05-06 00:57:36路偉濤任天鵬韓松濤
載人航天 2020年2期
路偉濤,陳 略*,任天鵬,韓松濤
(1. 北京航天飛行控制中心,北京100094; 2. 航天飛行動力學(xué)技術(shù)重點實驗室,北京100094)
1 引言
甚長基線干涉測量技術(shù)(Very Long Baseline Interferometry, VLBI)通過高精度時延/時延率估計,實現(xiàn)探測器高精度角位置測量,與傳統(tǒng)的測距、測速信息結(jié)合顯著提高了深空探測器定軌精度,在深空探測任務(wù)中發(fā)揮了重要作用[1-2]。
自20 世紀70 年代,美國就將干涉測量技術(shù)應(yīng)用于深空探測中,且測角精度從1993 年火星觀察者號(MARS Observer)試驗中的20 nrad,提高到2002 年的Odyssey 火星探測任務(wù)中的1 nrad量級,目前測角精度更是達到0.1 nrad 量級[3]。日本將同波束干涉測量技術(shù)(Same Beam Interferometry,SBI)應(yīng)用于探月任務(wù),實現(xiàn)了ps 量級的時延估計精度和10 m 量級的子衛(wèi)星定軌精度[4-5]。中國探月工程中的干涉時延測量精度約1 ns,有力支撐了深空探測器的測定軌任務(wù)[6]。
根據(jù)CCSDS 標準[7],深空干涉測量一般通過搭載VLBI 信標機實現(xiàn),其中S 頻段設(shè)置1 組信標信號(帶寬約7 MHz), X 頻段設(shè)置2 組信標信號(帶寬約40 MHz)。 國內(nèi)外針對VLBI 信標體制下的干涉測量數(shù)據(jù)處理開展了大量的研究,Wu等[8]通過增加VLBI 信號處理帶寬提高干涉測量精度;郝萬宏等[9]引入鎖相環(huán)處理,通過改善信號相位估計精度以提高干涉測量精度;馬茂莉等[10]利用本地相關(guān)處理方法,提高相關(guān)處理頻譜分辨率,改善干涉測量精度。
考慮到在軌航天器存在未搭載VLBI 信標機的情況,同時存在受航天器載荷限制無法搭載VLBI 信標機的問題,本文提出一種利用通用下行信號(遙測信號、數(shù)傳信號等)開展干涉測量的相關(guān)處理方法,并根據(jù)通用下行信號載波抑制的特點,提出基于載波重建的相時延提取方法,針對某地球同步衛(wèi)星下行信號特點,對所提出的數(shù)據(jù)處理方法進行試驗驗證。
2 干涉測量基本原理
干涉測量通過對接收信號進行相關(guān)處理,求取目標到不同測站的差分時延得到目標方向角估計,以此對深空探測航天器提供較強的橫向約束,提高導(dǎo)航定位精度。 干涉測量原理如圖1 所示。 設(shè)基線長度(兩站天線相位中心的距離)為B、幾何時延τ、幾何路徑差ΔR 及方向角θ,可得式(1)。

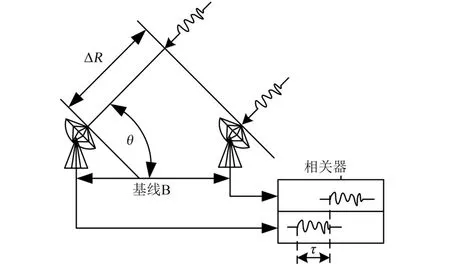
圖1 干涉測量測角原理圖Fig.1 Angle measurement scheme of interferometry
其中,c 為光速。 干涉測量時延估計精度直接受信號帶寬影響,當信號帶寬約40 MHz 時,時延估計精度可達到亞ns 級。 由式(1)可得到目標方向角估計θ^,見式(2)。

3 通用信號相關(guān)處理技術(shù)分析
3.1 通用下行信號載波重建
VLBI 信標信號可建模為正弦信號,且未調(diào)制其他數(shù)據(jù)。 而航天器通用下行信號,特別是寬帶信號(如數(shù)傳信號)一般通過編碼和調(diào)制抑制了載波信息,以更有效地利用下行功率。 因此,為利用下行載波信息進行干涉測量,必須進行載波重建[11-12]。
假設(shè)兩測站接收通用信號建模如式(3)所示。
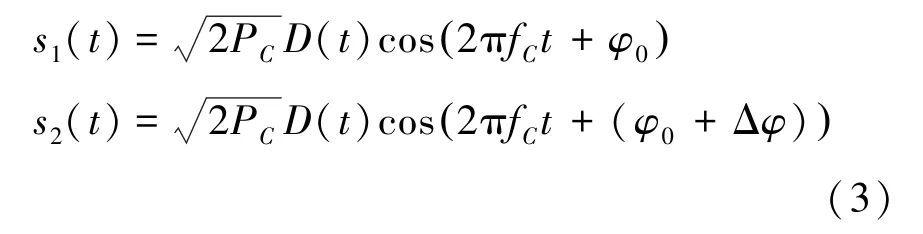
其中,PC為下行信號功率;D(t)為調(diào)制數(shù)據(jù);fc為下行信號載波頻率,φ0為信號初始相位,Δφ 為兩站初始相位差。 載波重建目的即為提取Δφ。
文獻[13]采用平方法實現(xiàn)了抑制載波調(diào)制的差分相位提取,主要處理過程包括群時延估計、時延補償、平方法載波重建和差分相位估計,并分析了載波差分相位無模糊估計的時延補償精度,見式(4)。

其中,T 為觀測數(shù)據(jù)的中頻載波周期, στ為時延測量精度。 實際信號處理一般在中頻進行,中頻采樣率往往小于信號的載波頻率,同時數(shù)據(jù)采集過程中的下變頻處理不影響信號相位,因此,對于2.2 GHz的信號,假如下變頻后中頻頻率為70 MHz,以56 MHz 欠采樣,那么采樣數(shù)據(jù)的中心頻率在14 MHz左右,則群時延估計精度達到約6 ns時即可無模糊地提取式(3)中信號的差分相位。
3.2 載波相位整周模糊解算
干涉測量時延分為群時延和載波相位時延。其中,群時延由兩測站接收信號直接相關(guān)處理和互譜相位擬合得到,時延測量范圍大,精度受信號帶寬約束,是當前深空探測任務(wù)中主用的干涉測量觀測量,具體實現(xiàn)方式可參見文獻[14];載波相位時延是在高精度時延補償?shù)幕A(chǔ)上,求解得到兩測站載波差分相位以及相應(yīng)的時延,時延估計精度與射頻頻率相關(guān),較群時延精度高2 ~3 個量級,但需進行載波相位整周解模糊。 設(shè)載波差分相位為式(5):

其中,Δφ 為真實載波相位差(即包含整周部分); ΔN 為整周數(shù)差;Δφ 為非整周部分相位差。通常情況下,對VLBI 信標信號進行相關(guān)處理,可得到群時延估計,然后由群時延估計Δτg可以得到ΔN 的估計,即式(6):

其中,[]表示取最近的整數(shù),TC為fc載波的周期。 為了能夠正確解整周模糊, Δτg的估計精度必須滿足一定的要求。 本文采用3σ 準則,即式(7):

其中,σΔτg為Δτg的標準差,此時通過群時延解算載波整周模糊的概率理論上為99.7%。 對于S 頻段(2.2 GHz)的信號,解模糊要求群時延的估計精度為75.7576 ps。
3.3 系統(tǒng)時延偏差估計
選擇經(jīng)長期觀測、位置精確已知的射電源進行系統(tǒng)時延偏差估計,是干涉測量中的常用方式[15-16],具體方案如圖2 所示。 其中,θ1、θ2為航天器T 和參考源S 相對兩天線的夾角,夾角越小,差分標校效果越好。
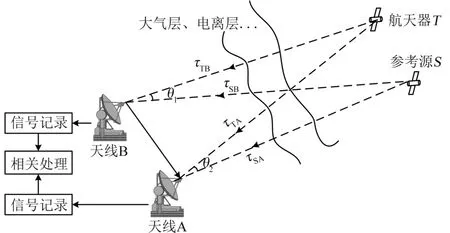
圖2 系統(tǒng)時延偏差估計方案示意圖Fig.2 Estimation scheme of systematic delay bias
首先對參考源進行觀測和相關(guān)處理,得到參考源S 到測站A、B 的時延估計τSA、τSB。 由于參考源位置和測站位置精確已知,可以通過計算得到參考源到兩測站的幾何時延差τSGeo,則由參考源的時延估計和幾何時延差可以估計出測控系統(tǒng)的時延偏差,見式(8):

設(shè)高軌衛(wèi)星T 到測站A、B 的時延估計τTA、τTB,由上述系統(tǒng)時延偏差可以對高軌衛(wèi)星的測量結(jié)果進行校準,見式(9):

4 試驗方案與結(jié)果
4.1 試驗方案
為了驗證通用信號干涉測量性能,試驗方案流程如圖3 所示。
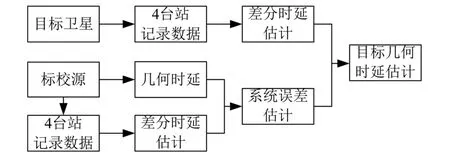
圖3 通用下行信號干涉測量試驗流程圖Fig.3 Flowchart of interferometry test by using universal downlink signals
該方案包括以下4 個步驟:
1)選取觀測目標。 本試驗選擇下行信號含有遙測和數(shù)傳信號的某同步衛(wèi)星,且得到其軌道信息,通過將干涉測量結(jié)果與已知軌道進行比對考查干涉測量的有效性。
2)目標差分時延估計。 對記錄的中頻信號進行差分相位提取、載波整周模糊解算等處理得到載波差分時延估計;
3)系統(tǒng)時延偏差估計。 由于測量系統(tǒng)往往存在一定的系統(tǒng)時延,使得載波差分時延估計值與實際幾何時延存在偏差,因此必須進行系統(tǒng)時延偏差估計;選擇某射電源進行差分觀測,得到差分時延估計,并計算該射電源的幾何時延,繼而得到系統(tǒng)時延偏差估計。
4)測量精度驗證。 將系統(tǒng)時延偏差估計與載波差分時延估計綜合處理可得幾何差分時延估計。 假設(shè)觀測目標的軌道精確已知,那么可計算出觀測目標到測站的精確幾何時延,與幾何差分時延估計進行對比,以評估干涉測量性能。
4.2 同步衛(wèi)星通用下行信號載波時延提取方法
圖4 給出了所選同步衛(wèi)星數(shù)據(jù)的頻域信息。可以看出,頻譜顯示數(shù)據(jù)含有2 種信號類型,分別為寬帶數(shù)傳信號和遙測信號,其中寬帶數(shù)傳信號主瓣位于16~25 MHz 之間,帶寬約為9 MHz;經(jīng)放大后,遙測載波位于3.143 MHz,帶寬約260 kHz。
由于寬帶數(shù)傳信號群時延估計精度和遙測信號群時延估計精度均不能達到載波時延解模糊要求,故需要對2 種信號進行聯(lián)合處理,處理框圖如圖5 所示。 首先對寬帶數(shù)傳信號進行相關(guān)處理,得到寬帶群時延估計;然后從寬帶數(shù)傳信號和遙測信號中提取載波( 間距約17.4202 MHz),求解兩者的差分相位,并用寬帶群時延進行解模糊,得到寬帶-遙測信號的聯(lián)合群時延;最后,考慮到寬帶信號載波提取中平方損耗的影響,選擇對遙測信號載波時延進行整周模糊解算,得到載波時延估計。
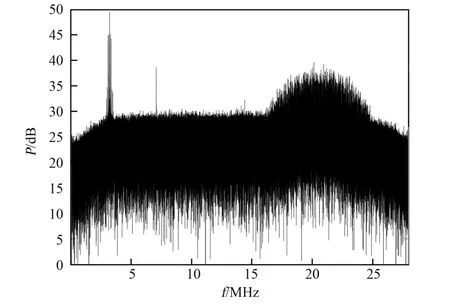
圖4 某地球同步衛(wèi)星數(shù)據(jù)頻域信息Fig.4 Downlink signal spectrum of some GEO satellite
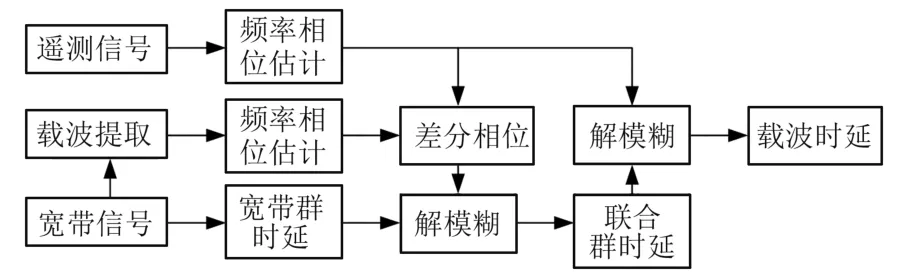
圖5 基于雙測控信號聯(lián)合處理的載波時延估計框圖Fig.5 Phase delay estimation based on joint processing of two types of downlink signals
上述方案存在二次解模糊過程:寬帶群時延解算寬帶-遙測聯(lián)合群時延模糊、寬帶-遙測聯(lián)合群時延解算載波時延模糊。 解模糊對二次群時延估計精度的要求也不同。 設(shè)載波頻率為fc,載波周期為Tc,采樣頻率為fs,采樣周期為Ts,寬帶群時延估計精度為στ1,寬窄帶側(cè)音群時延估計精度為στ2。 若補償精度為整數(shù)比特,則二次群時延估計精度滿足式(10)。

當采樣率為56 MHz,載波頻率約為2250 MHz,數(shù)傳信號載波-遙測信號載波間距約為17.4 MHz,則兩次群時延估計精度要求分別為2.98 ns 和72.46 ps。 可為積分時間的設(shè)定提供依據(jù)。
4.3 試驗結(jié)果及分析
利用北京航天工程大學(xué)的天線組陣系統(tǒng)開展觀測試驗,該系統(tǒng)由4 個12 m 天線(測站)、1 個設(shè)備機房(數(shù)據(jù)處理中心)和1 個監(jiān)控機房組成;4 個測站均通過同軸電纜與數(shù)據(jù)處理中心連接,干涉基線為百米量級[17]。 觀測某同步衛(wèi)星發(fā)射的遙測信號和寬帶數(shù)傳信號,觀測時長約120 s。數(shù)據(jù)射頻頻率221x.xxxx MHz、中頻頻率70 MHz,中頻采樣頻率56 MHz。
分段讀取數(shù)據(jù),每段數(shù)據(jù)長149.8 ms,間隔0.2 s,共讀取80 段數(shù)據(jù),時間跨度約16 s。 按照圖5 流程處理。 由于寬帶信號載波提取中平方處理會引起相位模糊,所以在相位提取過程中,通過寬帶群時延估計結(jié)果對2 路信號進行補償,使兩者相位盡量靠近。
圖6 給出了寬帶群時延估計、補償值。 其中時延補償值精確到寬帶群時延估計值整數(shù)位。 此處為34 Ts(Ts 為采樣周期);時延補償后,2 路信號的殘留時延均值約為2.9494 ns(約0.1652 Ts)。 由于時延補償后,殘留時延均值位于寬帶側(cè)音群時延的無模糊范圍(約57.4046 ns)內(nèi),所以寬帶側(cè)音群時延不會出現(xiàn)整周模糊,符合圖5 所示方案的解模糊要求。
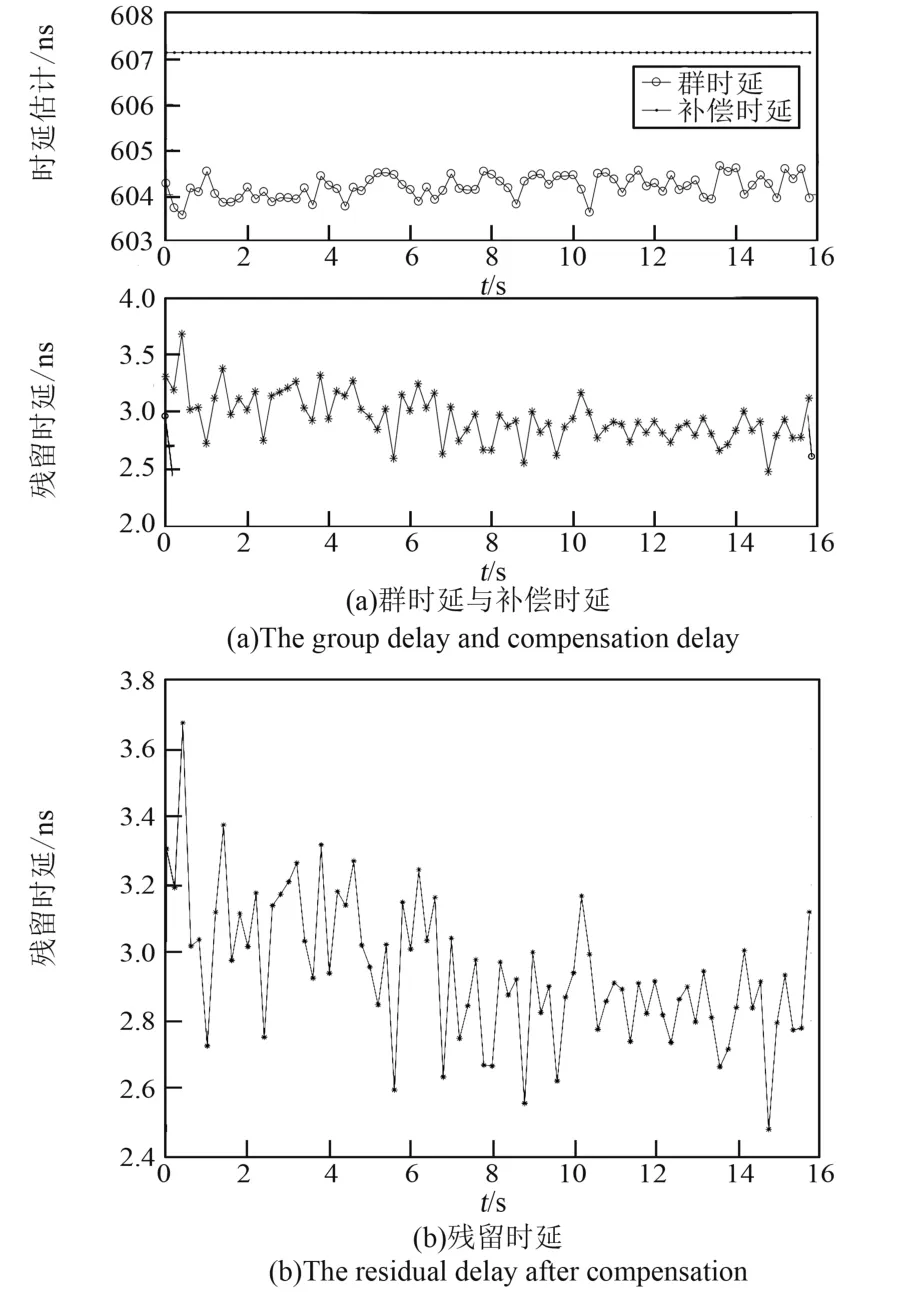
圖6 時延補償結(jié)果Fig.6 Results of time delay compensation
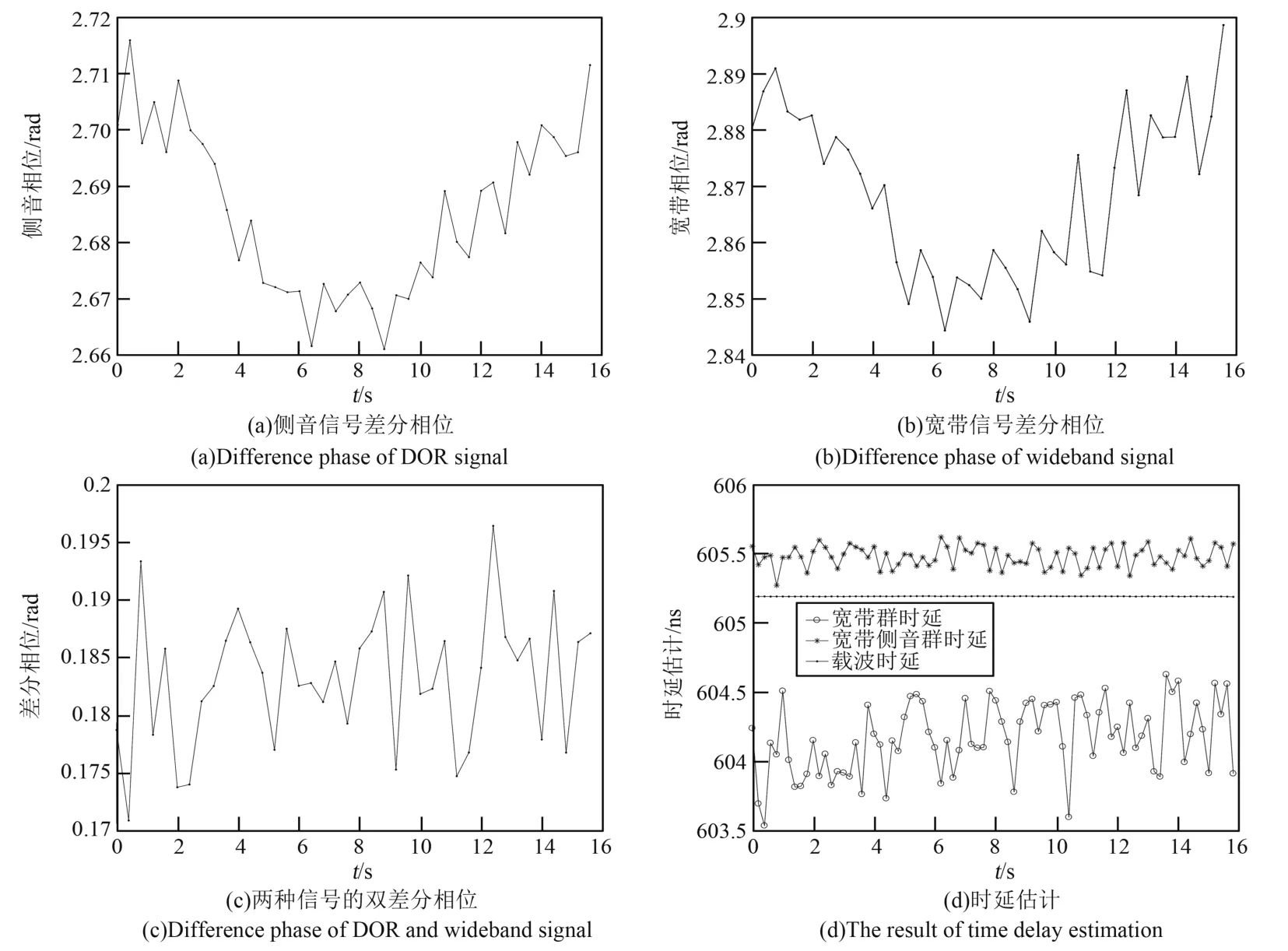
圖7 信號差分相位與載波時延估計Fig.7 Results of differential phase and carrier phase delay
圖7 給出了時延補償后2 路信號的差分相位和時延估計結(jié)果。 圖7(a)分別為遙測信號載波差分相位、寬帶提取載波差分相位以及兩者的差分相位。 可以看出側(cè)音差分相位與寬帶載波差分相位的趨勢基本一致,兩者的差分相位比較平穩(wěn),此時兩者差分相位估計標準差為8.46 mrad。 圖7(b)給出了寬帶信號群時延、寬帶信號載波與側(cè)音信號載波群時延,以及估計出的載波時延結(jié)果,3 種情況估計均值與標準差分別為:604.1745 ns/256.1463 ps、605.4789 ns/77.2970 ps、605.1930 ns/1.0278 ps。
采樣頻率設(shè)置如前。 選擇100 段數(shù)據(jù),每段數(shù)據(jù)長度0.1498 s,兩段數(shù)據(jù)間隔1 s,得到處理結(jié)果如圖8 所示。 由圖8(a)可以看出時延估計值與幾何時延存在較大的偏差,但有相近的趨勢。 將幾何時延值與時延估計值相減,得到圖8(b),發(fā)現(xiàn)兩者偏差的變化趨勢減弱,以此作為系統(tǒng)時延偏差的估計,得到偏差均值為118.34 ns,標準差為0.92 ns。 所以系統(tǒng)偏差估計為118.34 ns。 以此對載波時延估計結(jié)果進行修正,并與幾何時延進行對比,如圖9 所示。 可以看出,兩者趨勢存在一定的差異,這是由于載波時延測量結(jié)果不夠精確或數(shù)據(jù)質(zhì)量不夠高造成。 將估計值與幾何值進行差分,得到差分時延均值為0.5967 ns、誤差為1.03 ps。
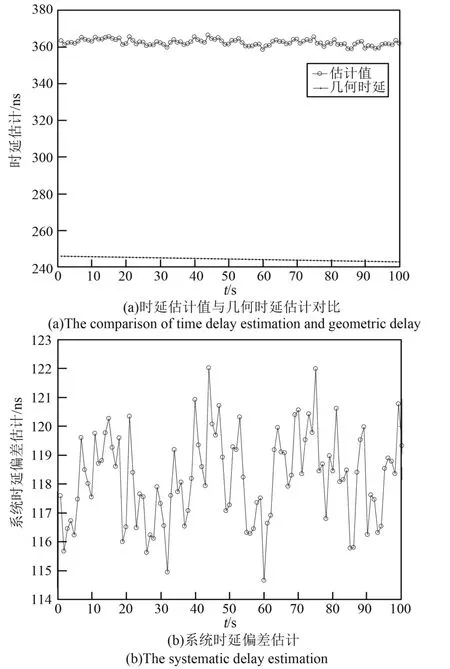
圖8 時延估計值相對幾何時延的偏差Fig.8 Delay bias between time delay estimation and geometric delay
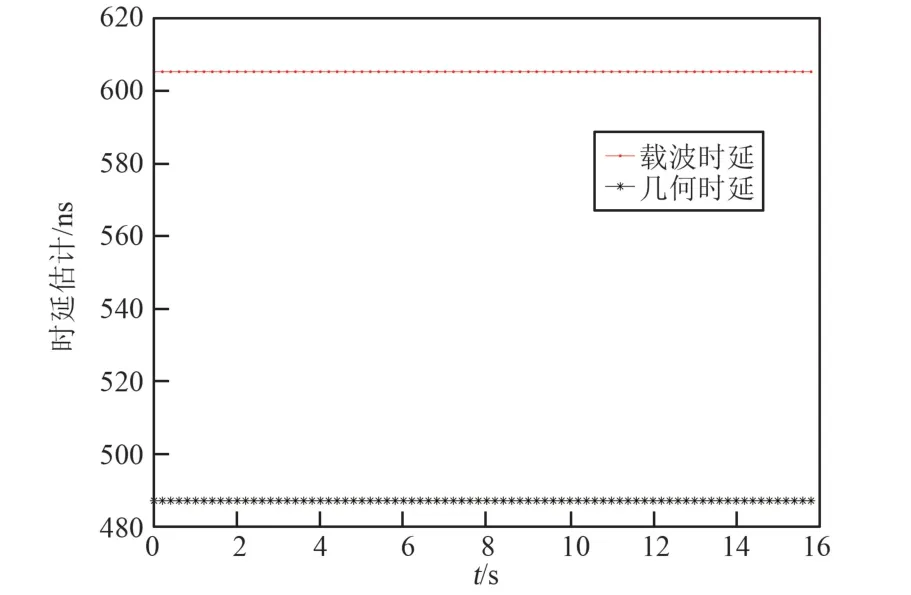
圖9 載波時延與幾何時延對比Fig.9 Comparison of carrier phase delay and geometric delay
5 結(jié)論
干涉測量技術(shù)以其高精度測角觀測量為航天器測定軌提供了良好的橫向約束。 針對航天器未搭載干涉測量信標機的情況,本文提出的基于航天器通用下行信號相關(guān)處理的干涉測量方和針對地球同步衛(wèi)星下行信號的遞進解模糊方法,可得到ps 量級的時延估計精度,在航天器測定軌中有著較為廣泛的應(yīng)用前景。
參考文獻(References)
[ 1] 朱新穎, 李春來, 張洪波. 深空探測VLBI 技術(shù)綜述及我國的現(xiàn)狀和發(fā)展[J]. 宇航學(xué)報,2010,31(8):1893-1899.
Zhu X Y, Li C L, Zhang H B. A survey of VLBI technique for deep space exploration and trend in China current situation and development[J]. Journal of Astronautics,2010,31(8):1893-1899. (in Chinese)
[ 2] 馬茂莉, 鄭為民, 黃逸丹, 等. 嫦娥三號探測器DOR 信號本地相關(guān)處理與定軌驗證[J]. 中國科學(xué)(物理學(xué),力學(xué),天文學(xué)), 2017, 47(2):100-108.
Ma M L, Zheng W M, Huang Y D, et al. Local correlation and orbit determination for DOR signals in Chang’E-3[J].Scientia Sinica (Physica,Mechanica & Astronomica),2017,47(2):100-108. (in Chinese)
[ 3] 唐歌實. 深空測控?zé)o線電測量技術(shù)[M]. 北京:國防工業(yè)出版社, 2012:81-83.
Tang G S. Radiometric Measuring Techniques for Deep Space Navigation [M]. Beijing: National Defense Industry Press,2012: 81-83. (in Chinese)
[ 4] Liu Q H, Kikuchi F, Matsumot K. Error analysis of samebeam differential VLBI technique using two SELENE satellite[J]. Advances in Space Research, 2007, 40(1):51-57.
[ 5] Goossens S, Matsumoto K, Rowlands D D, et al. 0rbit determination of the SELENE satellites using multi-satellite data types and evaluation of SELENE gravity field models[J].Journal of Geodesy, 2011, 85(8): 487-504.
[ 6] 韓松濤, 唐歌實, 曹建峰, 等. 面向CE3 號軟著陸過程的深空網(wǎng)干涉測量技術(shù)[J]. 深空探測學(xué)報, 2015, 2(2):120-124.
Han S T, Tang G S, Cao J F, et al. Application of interferometric tracking by China DSN in CE-3 soft landing[J]. Journal of Deep Space Exploration, 2015, 2(2):120-124. (in Chinese)
[ 7 ] CCSDS 506.1-R-2. Delta-DOR raw data exchange format[R]. Washington DC, CCSDS, 2010.
[ 8] Wu W R, Wang G L, Jie D G. High-accuracy VLBI technique using △DOR signals[J]. Scientia Sinica Informationis,2013, 43(2):185-196.
[ 9] 郝萬宏, 陸明泉. 嫦娥三號落月段中歐聯(lián)合測量弱信號相位估計[J]. 武漢大學(xué)學(xué)報(信息科學(xué)版),2019,44(10):1442-1448.
Hao W H,Lu M Q. Phase estimation for inter-agency interferometric tracking in Chang’E-3 powered descent flight [J].Geomatics and Information Science of Wuhan University,2019, 44(10):1442-1448. (in Chinese)
[10] 馬茂莉, 鄭為民, 黃逸丹, 等. 嫦娥三號探測器DOR 信號本地相關(guān)處理與定軌驗證[J]. 中國科學(xué)(物理學(xué),力學(xué),天文學(xué)),2017, 47(2):100-108.
Ma M L, Zheng W M, Huang Y D, et al. Local correlation and orbit determination for DOR signals in Chang’E-3[J].Scientia Sinica (Physica, Mechanica & Astronomica),2017,47(2):100-108.(in Chinese)
[11] Viterbi A J,Viterbi A M. Non-linear estimation of PSK-modulated carrier phase with application to burst digital transmissions[J]. IEEE Transactions on Information Theory, 1983,29(5):843-551.
[12] 王翠蓮, 李寅, 禹霽陽, 等. 深空通信載波同步高精度FFT 頻偏估計算法[J]. 航天器工程, 2018(6):63-68.
Wang C L,Li Y,Yu Q Y,et al. High accuracy FFT frequency offset estimation carrier synchronization algorithm in deep space communication[J]. Spacecraft Engineering, 2018(6):63-68. (in Chinese)
[13] 路偉濤, 洪家財, 楊文革. 基于寬帶相處理的連線干涉測量[J]. 裝備學(xué)院學(xué)報, 2014(2):80-85.
Lu W T, Hong J C, Yang W G. Connected elements interferometry based on wideband correlation processing[J]. Journal of Equipment Academy, 2014(2):80-85. (in Chinese)
[14] 錢志瀚, 李金嶺. 甚長基線干涉測量技術(shù)在深空探測中的應(yīng)用[M]. 北京: 中國科學(xué)技術(shù)出版社, 2012:58-76.
Qian Z H,Li J L. The Application of VLBI in Deep Space Exploration [M]. Beijing: Science and Technology of China Press, 2012:58-76.(in Chinese)
[15] 陳略, 唐歌實, 任天鵬, 等. 再入返回飛行試驗深空網(wǎng)干涉測量應(yīng)用分析[J]. 飛行器測控學(xué)報, 2015, 34(5):407-413.
Chen L, Tang G S, Ren T P, et al. Application of CDSN interferometric tracking in reentry return flight test missions[J].Journal of Spacecraft TT & C Technology,2015,34(5):407-413. (in Chinese)
[16] Roberto M, Trevor M, Ricard A. Delta-DOR a new technique for ESA’s deep space navigation [J]. ESA Bulletin, 2006,(128):69-74.
[17] Shi X S, Ma H, Jiao Y W. Optimizing deep-space antennas array configuration by multi-objective genetic algorithm[C]/ /Proceedings of the 27thConference of Spacecraft TT&C Technology in China, Chengdu, 2015:151-160.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00