基于空間覆蓋分析的導彈飛行規劃系統*
2020-05-18 02:59:40宋博文王茂才戴光明包芊彭雷宋志明陳曉宇
現代防御技術 2020年2期
宋博文,王茂才,戴光明,包芊,彭雷,宋志明,陳曉宇
(中國地質大學 計算機學院,湖北 武漢 430074)
0 引言
彈道導彈安全航跡規劃就是在充分考慮彈道導彈的攻擊時間、燃料消耗情況、各種約束以及途中區域等情況下,為彈道導彈規劃出一條最能滿足應用需求、安全性能最好的飛行航跡[1]。彈道導彈航跡安全路徑規劃能夠完全發揮出彈道導彈的優勢,提高其反偵察能力,相當有效地提高彈道導彈突破防御的能力和打擊目標的成功率,獲得預先制定的作戰效果[2]。
和一般無人飛行器比較,彈道導彈的安全航跡規劃有著一些特殊的要求[3]。首先彈道導彈射程較遠,所需規劃區域大,但是戰爭過程中環境十分復雜,各種威脅和障礙等因素都是實時改變的,而且打擊目標也會隨著時間而改變其位置,所以任務規劃時間的長短對于是否可以攻擊“時間敏感性”目標、達到“發現即打擊”的要求十分重要[4-5]。但是彈道導彈彈體較重、機動性能很差,不可能做到實時規劃[6]。所以對于彈道導彈安全航跡規劃問題,提高規劃算法的效率,縮短作戰過程中規劃時間,減少打擊目標的反應時間,對提高實時打擊能力有著重要的意義[7-8]。
1 空間區域覆蓋計算
空間區域覆蓋計算,指針對空間任意一點或區域(地球球體以外),對指定衛星星座進行三維空間覆蓋計算,進行覆蓋結果分析與評價[9]。衛星星座空間覆蓋情況示意圖如圖1所示。衛星Satellite1和Satellite2分別攜帶簡單圓錐體和矩形傳感器,要求對空間中的立體區域Target1進行覆蓋分析(已知衛星軌道參數、傳感器張角和用于描述目標區域的數據)。
與衛星對地覆蓋計算不同,空間區域覆蓋計算包括空間區域劃分、覆蓋計算2個過程。

圖1 衛星星座空間覆蓋示意圖Fig.1 Diagram of constellation coverage in space
1.1 區域劃分
首先找出空間目標區域(圓錐體、圓柱體、四面體、立方體等)的邊界(在地心固體坐標系中),再以一定精度(滿足實際覆蓋需求的精度劃分)從地心O引出多條“射線”,以一個空間立方體為例,將目標區域劃分為多個小棱臺,其中由紅色邊線圍成的一個區域成為一個小“棱臺”,劃分情況如圖2所示。

圖2 空間區域劃分Fig.2 Spatial division
1.2 覆蓋計算
如果只分析空間中的某個點,可以直接算得給定空間目標區域中任意一點在任意時刻的覆蓋狀態和覆蓋重數。若考慮空間中的立體目標區域,首先按照區域劃分規則劃分目標區域。針對劃分結果中的某個小棱臺,如圖3所示。其中,要求覆蓋的空間目標區間為圖中綠色錐體部分,在某一時刻只有Satellite1和Satellite2這2顆衛星可以對這一區間進行覆蓋,且這2顆星對這一小目標區域的可覆蓋區間分別為切面A,B切割的錐體區域以及切面C,D切割的錐體區域。對于這一時刻和這一小塊目標區域,一重覆蓋區間為切面C,A切割的錐體區域以及切面D和切面B切割的錐體區域,二重覆蓋區間為切面A,D切割的錐體區域,根據覆蓋區間也可算得覆蓋體積以及任意時刻空間目標區域的覆蓋率。
圖3 空間區域覆蓋分析Fig.3 Analysis of spatial coverage
2 導彈飛行路徑規劃
2.1 威脅分析
彈道導彈是一種特殊的無人飛行器,其飛行距離很長、飛行區域廣、飛行高度較高,所以彈道導彈的飛行時間會比較長,這就使得被敵方偵察到的概率變大,并且基于彈道導彈無法進行機動的缺陷,使得彈道導彈一旦被衛星或者雷達發現,就基本無法逃脫被擊毀的命運[10-11]。所以在規劃彈道導彈的飛行路徑時,必須要分析導彈被敵方衛星覆蓋到從而被監測打擊的可能威脅。
衛星在太空中進行偵察,一旦發現彈道導彈,可以立刻發送信息回到地面,地面收到信息后,馬上針對導彈進行跟蹤定位,而且彈道導彈無法進行機動,彈道航跡以及導彈落點可以很快被預測出來,所以導彈將有很大概率被攔截,導致任務失敗[12]。如果彈道導彈在飛行過程中不被任何衛星偵察到,那么這條路徑就被稱為安全路徑。
因此,本文的導彈安全飛行路徑規劃就是分析對方衛星對彈道導彈的覆蓋情況,通過對每一時刻衛星位置及其覆蓋范圍的計算,搜索衛星偵察過程中的盲區,設計彈道導彈的安全飛行路徑,找出一條或多條不會被敵方偵察衛星發現、安全性好的路徑,從而對導彈的發射方案提供決策支持。
2.2 導彈飛行軌跡安全性分析
導彈的整條飛行軌跡是一個比較大的空間區域,將軌跡離散成為很多的空間點,對每個空間點分別進行空間覆蓋性能分析,最后進行統計分析,從而得出整條彈道被覆蓋情況,通過評估得出整條彈道的安全性能[11]。
如圖4所示,從發射點F到目標點L整條彈道已知,在整條彈道中進行取樣,圖4中為了方便描述只取了A,B,C,D4個點,導彈在這4點的位置和時刻已知,天空中敵方衛星威脅已知,由此可以分析出各點是否被覆蓋,當取樣點數量較多時基本可以通過統計得出整條彈道的覆蓋情況,最后得出整條彈道第1次被覆蓋的時刻。
圖4 航跡安全性分析Fig.4 Analysis of trajectory safety
2.3 航跡安全性指標的設計與計算
在衛星很多而可選擇的發射時間段又很短的情況下,很多時候沒有辦法找到一條完全安全的航跡,此時就需要選擇第1次被衛星偵察到的時刻作為安全性指標,因為只要被偵察到一次,那么敵方就能夠獲取到整個彈道的航跡。但如果被偵察到的時機較晚,接近導彈命中打擊目標的時刻,由于在導彈航跡的后期導彈飛行速度很快,提供給敵方的反應時間及攔截時間都非常有限,這樣將大大提高敵方攔截的難度,降低攔截成功率[13-14]。所以采用整條航跡中第1次覆蓋時間最遲作為航跡安全性的評價指標。
可以利用網格點分析法來計算航跡安全性指標。首先對航跡中的每個取樣點進行統計計算,然后統計所有網格點的被覆蓋情況。
2.4 優化模型
彈道導彈航跡安全路徑規劃的目的是在給定發射點、目標點坐標以及發射時間段的情況下,主要考慮天基衛星威脅,找出一條安全性能最好的航跡。在進行優化的過程中,天空中敵方衛星信息事先給定,主要需要考慮因素為發射時刻。
在已知發射點和目標點的坐標之后,整條彈道的航跡就已經確定,根據彈道導彈的基本特點,只能按照預先設定的軌道進行飛行,無法在飛行過程中進行機動或者改變航跡[15]。
但發射時刻是可以進行優化的,衛星每一時刻所在的位置都不同,所以每一時刻空間中會出現的衛星覆蓋盲區也是不同的。本文導彈安全飛行路徑規劃的核心任務就是找出彈道導彈航跡正好處于衛星覆蓋盲區的發射時刻,使得衛星對彈道導彈無法進行偵察。即使彈道導彈的航跡已經確定,但是在不同的時刻發射,導彈飛行軌跡的安全性也不一樣,所以將發射時刻作為優化參數。
導彈航跡發射坐標為(a1,b1),目標坐標為(a2,b2),發射時刻為T,主要威脅可以看作一個衛星星座,這些衛星軌道構成比較穩固的空間幾何構型,衛星之間具有不變的時空聯系,可以對全球進行偵察,而整個星座中的每一顆衛星都可以采用軌道六根數來描述,也就是S=(a,e,i,ω,Ω,M),其中a表示半長軸,e表示偏心率,i表示軌道傾角,ω表示近地點幅角,Ω表示升交點赤經,M表示平近點角。a和e共同確定著軌道的幾何形狀;i,Ω共同確定著軌道平面在空間中的位置;ω決定著軌道在軌道平面內的位置;M決定著某個時刻衛星在軌道上的位置。由此可以得出優化模型:
針對已知發射坐標(a1,b1)、打擊目標的坐標(a2,b2)以及發射區間(T1,T2),空中敵方衛星的六根數S=(a,e,i,ω,Ω,M)已知,優化參數為發射時刻T,優化結果為導彈的安全飛行路徑。
優化目標為無覆蓋或導彈第1次被覆蓋時間TF最晚。
3 基于空間覆蓋分析的導彈規劃與決策支持軟件系統
3.1 軟件體系架構
基于空間覆蓋分析的導彈飛行規劃及決策支持軟件系統,從功能模塊上劃分,可大致劃分為5個層次,系統的總體框架如圖5所示。
各個子模塊的作用如下:
坐標系統:實現日心慣性坐標系和行星中心慣性坐標系的轉換;
時間系統:實現了時間不同儒略歷元之間的轉換、儒略日和UTC以及TAI之間的轉換;
數學運算:矢量運算和數學庫,提供所有矢量運算,包括矢量旋轉等功能;
圖5 系統總體框架Fig.5 System overall framework
太陽系和星歷模塊:該模塊提供太陽系模型中的所有常量和星歷數據,同時實現了基于ESA和JPL的2種星歷模型;
星下點計算:在坐標系統轉換的基礎上,實現將三維位置投影到二維平面之上;
軌道計算:基本二體軌道求解模塊,維護一條二體軌道的根數等信息,可以根據要求計算J2攝動軌道;
模型創建:為二維可視化和三維可視化提供相關模型;
覆蓋分析:計算衛星星座對地面及空間區域的覆蓋性能,包括:條帶覆蓋,波束覆蓋,衛星側擺等,同時能對星座中的衛星進行重要性分析;
可視化仿真:導彈以及衛星在二維和三維空間中運行軌跡的可視化仿真,導彈發射與爆炸仿真;
數據庫:完成仿真過程數據的收集與存儲管理功能,可供后續分析、顯示和仿真過程回放等使用;
想定管理:對場景中的飛行器及所攜帶載荷的管理;
導彈飛行規劃及決策支持:空間安全飛行通道的計算及空間安全飛行路徑的設計。
基于空間覆蓋分析的導彈飛行規劃系統的主界面,擬設計成如圖6所示。整個系統平臺仿真界面主要包括快捷菜單區、二維顯示區、三維顯示區、任務管理區和仿真控制區。
3.2 軟件功能模塊
導彈飛行規劃及決策支持軟件系統主要包括五大部分:想定管理子系統、二維可視化子系統、三維可視化子系統、數據庫子系統、衛星覆蓋分析子系統等。
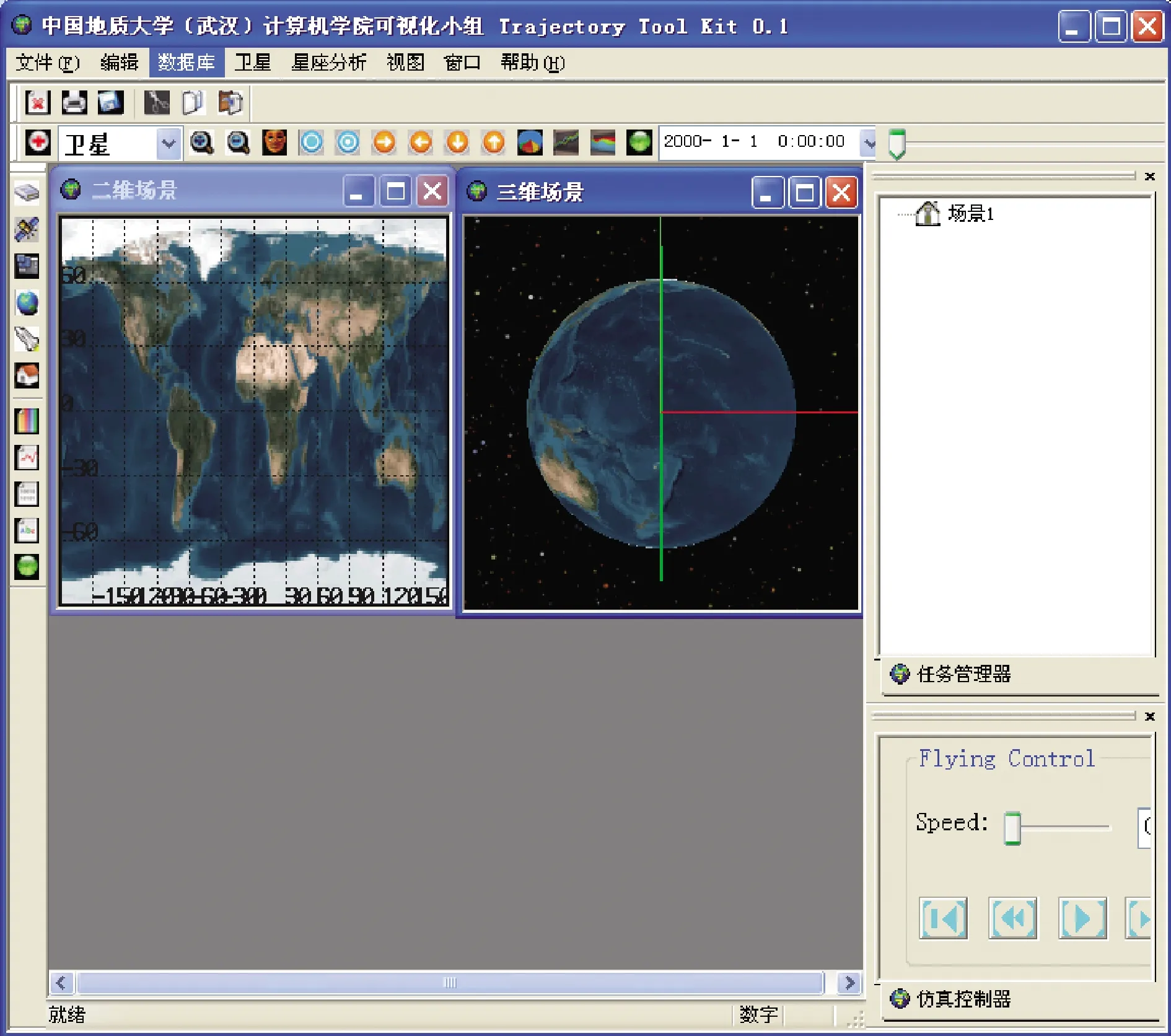
圖6 基于空間覆蓋分析的導彈飛行規劃系統的主界面Fig.6 Main interface of missile flight planning system based on spatial coverage analysis
3.2.1 想定管理子系統
想定管理子系統實現想定的初始設定、結果保存、后續編輯、想定加載等功能,并在軟件界面中進行合理規劃與實現。想定管理子系統采用XML文件方式維護任務信息,初始設定包括了任務代號、任務描述、任務時間、衛星及星座組成。結果保存采用XML格式進行實現,便于將來與其他系統的互操作。后續編輯能夠對已保存的XML格式數據進行讀取及方便、快捷的編輯,并保存主要的修改信息。想定加載能夠對當前編輯狀態的想定或已編輯好的想定數據進行加載,作為系統進行仿真運行的初始化參數。
3.2.2 二維可視化子系統
二維可視化子系統主要功能是完成衛星運行態勢,星下點軌跡,衛星的位置、速度、加速度,導彈飛行軌跡,安全飛行通道等的顯示,實現仿真運行過程中的實時態勢顯示。圖7為二維可視化效果示意圖。
3.2.3 三維可視化子系統
三維可視化子系統是整個軟件的核心部分,主要功能包括衛星的動態添加和三維模型的顯示,導彈的三維飛行軌跡顯示、三維空間安全飛行通道的顯示、衛星參數的實時修改,完成衛星系統的仿真運行情況,包括衛星的位置、姿態,衛星星座的幾何關系、主要天體運行情況,以及衛星和星座系統的地球表面覆蓋情況,實現在仿真過程中觀察視角的動態轉移,以及能夠對導彈武器機動、發射、飛行過程的可視化過程進行三維可視化渲染。

圖7 導彈飛行軌跡二維可視化演示圖Fig.7 2D visualization presentation of the missile trajectory
導彈武器的整個仿真過程包括導彈的機動、發射、飛行及爆炸等。導彈的機動實現運載車將導彈運載到發射場的仿真,發射場場景和運載車的機動過程的仿真非常逼真。導彈機動的效果圖如圖8所示。導彈飛行的過程是根據真實導彈的軌跡數據進行適當的插值仿真出來的。導彈飛行的三維效果圖如圖9所示。
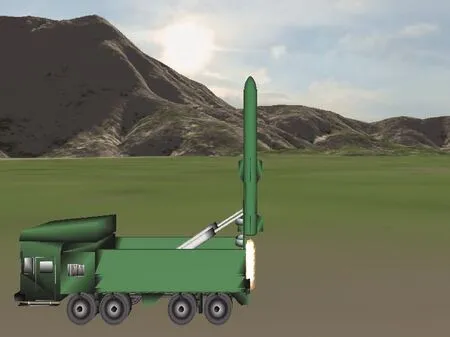
圖8 導彈機動發射效果圖Fig.8 Rendering of missle launch

圖9 導彈三維飛行效果圖Fig.9 3D rendering of missile flight
3.2.4 數據庫子系統
數據庫子系統的主要功能是完成仿真過程數據的收集與存儲管理功能,可供后續分析、顯示和仿真過程回放等使用。本平臺采用Access進行底層數據庫實現,面向將來的系統仿真中的大量空間飛行器和復雜的決策任務需求,完成大量數據的儲存、管理功能。數據庫子系統進行合理規劃,建立友好人機界面,方便進行數據存儲、瀏覽、編輯、導出、刪除等功能。
3.2.5 衛星系統覆蓋分析子系統
針對衛星系統覆蓋范圍進行分析,該子系統的主要功能是完成單一衛星的覆蓋分析、衛星星座的覆蓋分析以及空間任意一點(地球球體以外)被衛星星座覆蓋情況的分析。其中覆蓋分析要分別要考慮地面遮擋即最小觀測角、星載設備視角(包括矩形視場和圓形視場)和星載設備側擺掃描等情況下的覆蓋區域計算及顯示。
4 算例設計
4.1 問題需求
面向具體任務場景,設計衛星軌道參考方案。根據導彈發射點和目標點的位置參數,連續發射多波導彈,空間5顆星順行軌道。設計5顆衛星的運行軌道參數,滿足任何時刻發射點、目標點、發射導彈都有衛星可監控,如圖10所示。需求覆蓋時間至少8 min,要求全程覆蓋地面區域,設計優化任務運行最優軌道。

圖10 衛星空間覆蓋效果圖Fig.10 Diagram of satellite coverage in space
4.2 設計結果仿真
圖11~14所示為所設計的5顆衛星對導彈的觀測示意圖。圖11~14中,衛星Sat1,Sat2分別用于在8 min內持續觀測發射點和目標點,衛星Sat3,Sat4和Sat5聯合用于在8 min內持續觀測各批次導彈的全程軌跡。

圖11 2D下初始時刻衛星覆蓋示意圖Fig.11 2D diagram of satellite coverage at the initial moment

圖12 3D下初始時刻衛星覆蓋示意圖Fig.12 3D diagram of satellite coverage at the initial moment

圖14 3D下8 min后衛星覆蓋示意圖Fig.14 3D diagram of satellite coverage after 8 min
5 結束語
中遠程以上射程的彈道導彈飛行時間較長,且大部分時間內處于慣性飛行,被對方衛星發現的概率較高,容易被攔截,降低了突防的概率。因此導彈的飛行規劃極其重要。本文圍繞導彈的安全航跡規劃問題,提出了衛星對空間區域的覆蓋計算方法,設計了導彈航跡安全性評價指標,構建了導彈航跡安全路徑規劃優化模型,并基于空間覆蓋分析,設計并開發了一個具有完全自主知識產權的導彈規劃與決策支持軟件系統。本文的研究為避開對方衛星的偵察、提高突防成功的概率提供了分析和設計基礎,具有較好的工程應用前景。
猜你喜歡
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28