反無人機監(jiān)測系統(tǒng)設計
2020-05-18 02:44:46歐陽玉梅
科技視界 2020年9期
關鍵詞:系統(tǒng)
歐陽玉梅
摘 要
針對輕小型民用無人機“黑飛”、“濫飛”和“亂飛”現(xiàn)象所產生的問題,設計一個集雷達探測和視頻監(jiān)控于一體的反無人機監(jiān)測系統(tǒng),旨在實現(xiàn)對限飛區(qū)域全天候、大范圍監(jiān)測及告警的功能。
關鍵詞
雷達探測;視頻監(jiān)控;反無人機監(jiān)測
中圖分類號: TN959.73 ? ? ? ? ?文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.09.051
Abstract
An anti-UAV monitoring system integrating radar detection and video surveillance is proposed to monitor and alarm widely black flight of small drones in the restricted flight area in all-weather.
Key Words
Radar detection;Video surveillance;Anti-UAV monitoring
0 引言
近年來中國輕小型民用無人機產業(yè)得到了迅猛增長,導致輕小型民用無人機“黑飛”、“濫飛”和“亂飛”現(xiàn)象頻發(fā),嚴重影響和威脅民航運輸安全、公共安全和社會治安。在具體的監(jiān)管過程中,由于技術原因,尚難以實現(xiàn)對“低空、慢速和小型目標(低小慢目標)”的精確探測,無人機低空防御系統(tǒng)及設備匱乏。本文將設計一個由微處理器、雷達掃描儀、高清云臺攝像機和報警模塊組成的反無人機監(jiān)測系統(tǒng),由雷達掃描儀進行大范圍搜索,當探測到目標時,發(fā)出報警,并輸出目標所在的方位和距離信息給微處理器,由攝像機進行遠距離圖像特征采集,并將探測到的信息進行分析處理,從而實現(xiàn)對限飛區(qū)域(如機場、政府辦公區(qū)域或私人場所等)全天候、大范圍監(jiān)測及告警的功能,可探測距離達200米以上。
1 系統(tǒng)原理
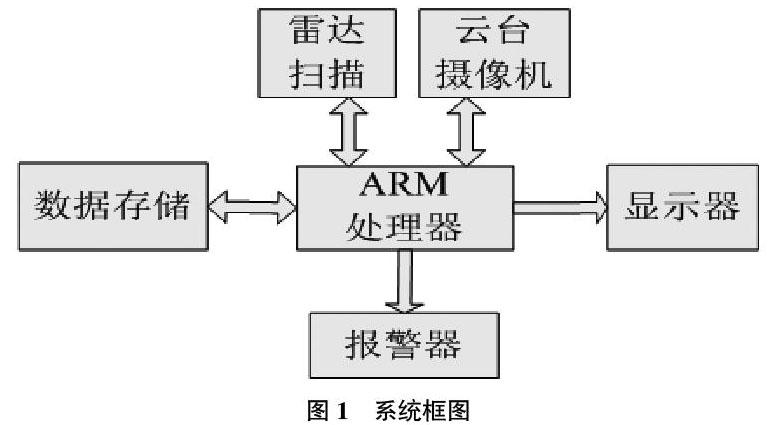
設計一個反無人機監(jiān)測系統(tǒng),由雷達掃描儀和高清云臺攝像機組成監(jiān)控前端,完成對目標無人機的探測,由處理器完成數(shù)據(jù)分析和處理,當監(jiān)測到無人機時,發(fā)出報警。具體內容包括:基于ARM的監(jiān)控平臺的搭建;基于ARM的監(jiān)控系統(tǒng)軟件設計;數(shù)據(jù)采集及處理;發(fā)現(xiàn)目標報警,如圖1所示。
1.1 雷達掃描
雷達通過掃描來尋找活動目標,當發(fā)現(xiàn)活動目標時將目標所在的方位和距離信息傳回處理器,系統(tǒng)發(fā)出報警。監(jiān)視范圍分為兩個區(qū)域,掃描半徑大于400米為雷達預警區(qū),雷達工作;半徑小于400米為識別區(qū),雷達和圖像系統(tǒng)同時工作,識別目標物體;本文采用ewig LLT-300來完成掃描探測功能,工作頻率為10.525GHz,工作電壓為8-15V DC,99級靈敏度可調,LLT-300采用了微波檢測專用微波處理器,它能夠對輸入信號進行脈頻和脈寬處理,對小動物甚至麻雀等小體積的物體進入都可以進行報警,探測效率高。由于ewig LLT-300掃描范圍有限,可根據(jù)限飛區(qū)域的大小架設多臺雷達掃描儀。
1.2 視頻監(jiān)控
采用集成高速大扭距精密云臺攝像機,可用0.01°/秒至100°/秒的速度,實現(xiàn)水平360°、垂直180°的完全無盲區(qū)監(jiān)視。當雷達檢測到活動目標時,可由處理器調節(jié)攝像頭對準目標進行拍攝,并提取該目標的圖像信息進項分析處理和識別,以區(qū)分是無人機還是飛鳥入侵,以便后續(xù)處理。本文采用AK-HD640高清夜視激光云臺攝像機來完成視頻監(jiān)控,采用獨特的激光器驅動技術,同時采用精密跟蹤功能的紅外激光照明器,配合具備200萬像素(圖像格式:H.264視頻編碼,1080P全高清,雙碼流)的長焦高性能攝像機模塊,可在完全無光的環(huán)境中全高清晰監(jiān)視1000米距離內的目標活動情況。
1.3 ARM處理器和各個功能性模塊間的控制技術
為使設計的嵌入式系統(tǒng)更小型化,許多任務被集成到了芯片的內部,且除了嵌入硬件系統(tǒng)中的中心控制器件外,還包括外圍硬件部分,該部分是包括用于存儲,調試,通信,顯示等輔助功能的其他部分,本文選用STM32F103處理器。
2 研究方法及技術路線
2.1 系統(tǒng)實驗方案
系統(tǒng)的監(jiān)控前端由雷達掃描儀ewig LLT-300和云臺攝像機AK-HD640組成,ewig LLT-300模塊完成掃描探測,通過串口與微處理器連接;AK-HD640模塊完成目標物體圖像信息采集,由微處理器對雷達探測信號和圖像信號進行分析處理和顯示,對目標物體進行識別及報警。
搭建好系統(tǒng)軟硬件平臺,并準備無人機一架,控制無人機飛入系統(tǒng)有效工作區(qū)域內,當雷達掃描儀探測到無人機時,雷達發(fā)出報警,同時將目標物體所在的方位和距離信息傳回至微處理器,處理器發(fā)出報警,同時處理器從視頻信號存儲器中截取視頻信息進行圖像處理,獲取無人機圖像信息。視頻監(jiān)控模塊即可以獲取入侵物體的圖像信息以避免將飛鳥誤判為無人機之外,也同時具備目標物體檢測的監(jiān)控功能。
2.2 可疑物體識別方案
對無人機的視頻監(jiān)控,可基于opencv計算機視覺開源庫來完成目標物體識別。上位機端采用Visual studio 2012為開發(fā)環(huán)境,并調用opencv計算機視覺開源庫進行識別和處理,將采集的視頻圖像顯示在上位機界面上,上位機界面如圖2。將無人機預設為待識別物體,opencv調用攝像頭,由打開攝像頭的開源代碼來讀取攝像頭中的視頻圖像信息,并進行實時視頻捕獲,然后將其分解為視頻幀寫入到視頻文件,當中當可疑物體闖入監(jiān)控范圍內時,系統(tǒng)將識別并捕獲其可疑物體的圖像信息,對視頻圖像先進行預處理,即灰度化濾波,再進行二值化、形態(tài)學運算和邊緣檢測,以達到圖像分割的目的,最后將檢測到的圖像經匹配分析確定為無人機后發(fā)出報警信息。
3 總結
本文提出一種集雷達掃描和視頻監(jiān)控于一體的反無人機監(jiān)測系統(tǒng)的設計方案,初步證明可實現(xiàn)對可疑目標的監(jiān)控。
參考文獻
[1]柏如玉,國內外反無人機技術發(fā)展分析[J].中國安防,2016(9):31-34.
[2]郝明明,盛懷潔,陳明建.反無人機轉發(fā)式干擾參數(shù)設計與仿真[J].信息科學與控制工程,2018(9):180-184
[3]王博陽,甘榮兵,“蒼鷺”無人機對抗手段探討[J].電子對抗,2017(2):25-31.
[4]王聰,劉明光,齊飛.智能視頻監(jiān)控系統(tǒng)動態(tài)目標檢測與識別算法綜述[J].電氣技術,2018(9):6-11.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
