基于小批量梯度下降的BP- PID 控制器設計
2020-05-19 09:15:38劉曉琳吳竟祎
科學技術創新 2020年11期
關鍵詞:系統
劉曉琳 吳竟祎
(1、中國民航大學電子信息與自動化學院,天津300300 2、中國民航大學中歐航空工程師學院,天津300300)
1 概述
飛機舵機電液負載模擬器是對舵機進行力矩加載的地面設備,是一個參數時變的非線性系統,用于舵機的力學性能測試。在進行性能測試時,舵機主動運動會干擾模擬器對舵機的加載,產生多余力。多余力會影響系統的加載精度和響應速度,對系統的控制性能產生不利影響[1]。因此設計具有優秀控制性能的控制器是飛機舵機電液負載模擬器亟待解決的問題。
2 電液負載模擬器的數學模型
根據系統的工作原理,本節介紹電液負載模擬器的結構組成,逐個建立各部件的數學模型。電液負載模擬器由控制器、電液伺服閥、閥控液壓缸、彈簧緩沖部件及傳感器組成。將系統的基本方程進行線性處理并進行拉普拉斯變換,從而得到系統整體的傳遞函數。電液伺服閥傳遞函數的隨其固有頻率變化,當電液伺服閥的固有頻率遠大于閥控液壓缸的固有頻率時,傳遞函數可簡化為比例形式,即KSV是伺服閥增益。閥控液壓缸是液壓能與動能的轉換裝置。轉換過程可以由流量轉換方程,流量連續性方程和力學平衡方程描述。聯立三個方程可以得到閥控液壓缸傳遞函數有以下關系
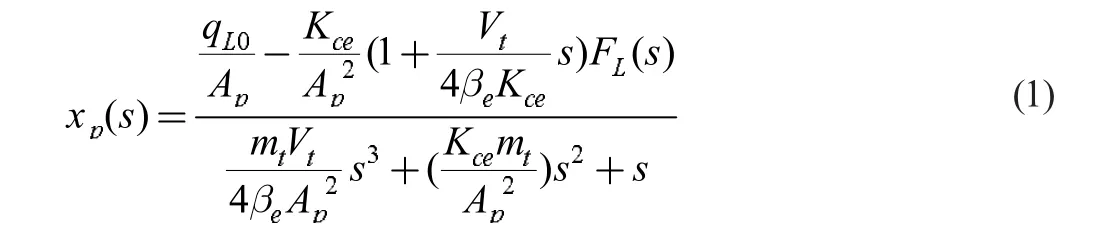
式中,qL0是負載流量;Kce是總壓力流量系數;Ap是閥控液壓缸活塞的有效面積;xp(s)是活塞位移;Vt是液壓缸總壓縮容積;βe是油液有效體積彈性模量;mt是液壓缸活塞與負載的等效質量;FL是系統外負載力。
系統的外負載力由彈簧緩沖裝置提供。故有以下形式

式中,KL是彈簧緩沖裝置的進度系數;yr是舵機位移。
根據公式(1)和公式(2)推導系統輸出力與伺服閥閥芯位移和舵機位移之間的關系

3 BP 神經網絡PID 控制器設計

BP 神經網絡由輸入層,隱藏層和輸出層構成。BP 神經網絡的學習過程分為兩個部分,學習數據的正向傳播與誤差的反向傳播。在正向傳播時,數據逐層經過各個神經元進行加權線性變換并通過激活函數傳遞至下一層的各個神經元中,最終在輸出層神經元上得到輸出值。輸出層數據與期望數據比較,得到誤差。
BP 神經網絡正向傳播時,第i 層的第j 神經元的輸出值有以下形式

式中,yij是第i 層的第j 神經元的輸出;xi是該神經元的輸入;wi是神經元的權值系數;m 是前一層神經元的個數;f 是神經元的激活函數; 是神經元的偏置,是取值為-1 的常數。
神經網絡進行反向傳播時,使用梯度下降法來進行權值系數的更新。小批量梯度下降法是對批量梯度下降法和隨機批量梯度下降法的改進。該方法引入了批量規模的概念,即每次權值系數迭代時,使用與批量規模相同數量的數據進行更新。在使用小批量梯度下降算法時,神經網絡的迭代公式有以下形式

式中,wij是神經元的權值;wi是神經網絡的學習速率;n 是批量規模;p 是選擇學習樣本的參數,通過該神經元權值迭代次數決定;yout是該神經元的輸出;y 是該神經元的理想輸出值。
4 仿真實驗結果
為了驗證小批量梯度下降法的BP-PID 控制器的可行性和有效性,利用MATLAB 軟件進行仿真實驗并與常規PID 控制器進行對比。設定舵機輸入指令是一個幅值為5mm,頻率為10Hz的正弦信號。在加載梯度是2T/mm 時,系統多余力仿真曲線如圖2 所示。曲線1 和曲線2 分別表示常規PID 控制器控制下的多余力和基于小批量梯度下降法的BP-PID 控制器。
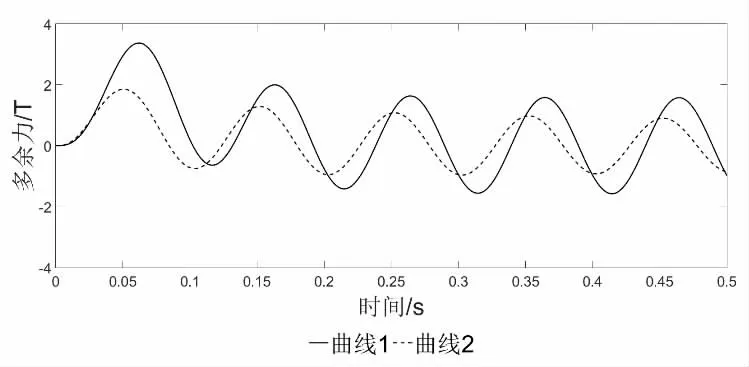
圖1 系統多余力抑制實驗結果
由圖2 分析可知,在使用常規PID 控制器時,多余力在初始時刻有最大值3.37 T。而在基于小批量梯度下降法的BP 神經網絡控制器控制時,多余力在初始階段的干擾明顯減弱,其最大值為1.85T。在進入穩定階段后,基于小批量梯度下降法的BP-PID 控制器具有更好的追蹤效果,此時系統最大多余力為1.08T,遠低于常規PID 控制器。結果表明,基于小批量梯度下降的BP-PID 控制器對多余力的抑制效果明顯優于常規PID 控制器。
5 結論
本文以飛機舵機電液負載模擬器為研究對象,根據系統各部件的結構和原理建立了數學模型。提出基于小批量梯度下降法的BP 神經控制方法,并使用MATLAB 仿真證明該方法滿足系統技術指標的要求。該控制方法對比常規PID 控制器具有更高的加載精度。解決了常規PID 控制器存在的問題并抑制了飛機舵機電液負載模擬器多余力的干擾。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32