可重復(fù)使用飛行器再入姿態(tài)的區(qū)間二型自適應(yīng)模糊滑模控制設(shè)計
2020-06-01 09:04:38楊珍書毛奇竇立謙
北京航空航天大學(xué)學(xué)報 2020年4期
楊珍書,毛奇,竇立謙
(1.江蘇航空職業(yè)技術(shù)學(xué)院 航空工程學(xué)院 鎮(zhèn)江市無人機應(yīng)用創(chuàng)新重點實驗室,鎮(zhèn)江212134;2.天津大學(xué) 電氣自動化與信息工程學(xué)院,天津300072)
為進一步推動空間應(yīng)用的深入和空間技術(shù)的發(fā)展,可重復(fù)使用飛行器(Reusable Launch Vehicle,RLV)受到了廣泛的關(guān)注與研究。作為一類新型的天地往返飛行器,RLV兼具航空器與航天器特點,其在軍事和民用領(lǐng)域具有廣泛的應(yīng)用前景[1-2]。作為一類多變量系統(tǒng),RLV具有較強的非線性和強耦合性,且在再入返回過程中易受飛行環(huán)境和飛行范圍的影響,由此對可重復(fù)運載器控制系統(tǒng)設(shè)計產(chǎn)生了極大的挑戰(zhàn)[3-4]。
為了保證RLV安全且可靠的再入飛行,國內(nèi)外學(xué)者在近年來進行了非常多的研究工作。Groves等[5]基于飛行器的線性化模型,設(shè)計了線性二次型調(diào)節(jié)器控制方法。但由于飛行器模型具有較大的非線性,線性化后的模型與飛行器自身模型存在一定的建模誤差。Georgie和Valasek[6]針對再入飛行器提出了非線性動態(tài)逆姿態(tài)控制策略。然而,當(dāng)模型存在較大不確定時,此控制策略不能實現(xiàn)非線性項的對消,進而影響飛行器控制性能。Fiorentini等[7]利用反步方法思想針對飛行器設(shè)計了非線性魯棒控制器,但在計算過程中,由于虛擬控制指令被多次求導(dǎo),易產(chǎn)生微分膨脹問題,從而無法保證飛行器跟蹤性能。文獻[8-10]針對飛行器模型特點,利用魯棒自適應(yīng)控制技術(shù)分別設(shè)計了控制器,取得了較好的控制效果。
然而,由于RLV在再入飛行階段動力學(xué)參數(shù)變化較大,易受到模型參數(shù)不確定性和外界干擾的影響,同時飛行器再入模型在轉(zhuǎn)化過程中存在未建模動態(tài)項,因此所設(shè)計的再入RLV控制策略要具有較強魯棒性。滑模控制(Sliding Mode Control,SMC)方法是一類具有較強魯棒性的控制方法,常用于飛行器控制策略的構(gòu)建。Shtessel等[11-12]針對RLV,基于內(nèi)外雙環(huán)結(jié)構(gòu)提出了滑模控制器,進而避免了對姿態(tài)角誤差的高階求導(dǎo)問題。Liu等[13]結(jié)合狀態(tài)擴張觀測器設(shè)計滑模控制策略,取得了良好的跟蹤性能。模糊邏輯系統(tǒng)(Fuzzy Logic System,F(xiàn)LS)由于能較好地處理模型不確定性和非線性項問題,因此受到了眾多學(xué)者關(guān)注[14-17]。相比于type-1模糊系統(tǒng),type-2模糊系統(tǒng)能在Mamdani和Takagi-Sugeno FLS中提供額外的自由度[18-21],尤其是在系統(tǒng)存在大量不確定性的情況下能夠提供更好的跟蹤逼近性能。Tao等[22]針對飛行器存在測量噪聲問題,利用type-2模糊系統(tǒng)設(shè)計控制器,使得系統(tǒng)具有較好的跟蹤控制性能。
對此,本文考慮RLV在參數(shù)不確定性和外界干擾影響下系統(tǒng)姿態(tài)跟蹤問題,結(jié)合區(qū)間二型自適應(yīng)模糊系統(tǒng)和滑模控制技術(shù)設(shè)計RLV再入姿態(tài)跟蹤控制策略。首先,基于RLV再入動態(tài)模型和反步策略,將飛行器姿態(tài)模型分為內(nèi)外環(huán)子系統(tǒng)。接著,將RLV再入動態(tài)模型的參數(shù)不確定性和外界干擾分別看作內(nèi)外環(huán)子系統(tǒng)非線性項的一部分。然后,設(shè)計合適的區(qū)間二型模糊系統(tǒng)用于子系統(tǒng)非線性項的估計。同時,利用滑模控制策略和自適應(yīng)技術(shù)構(gòu)造飛行器的外環(huán)子系統(tǒng)的虛擬控制量,進而確定內(nèi)環(huán)子系統(tǒng)的控制律。在姿態(tài)角控制策略設(shè)計中,引入一階低通濾波器以處理虛擬控制量。基于Lyapunov方法在理論上證明閉環(huán)控制系統(tǒng)的穩(wěn)定性,且RLV姿態(tài)跟蹤誤差能收斂在原點附近的小鄰域中。最后,通過RLV六自由度模型的數(shù)值仿真驗證了本文所提出控制方法的有效性及跟蹤性能。
1 問題描述
1.1 RLV再入動態(tài)模型
RLV再入飛行動態(tài)過程可由三自由度質(zhì)心運動的平動方程與三自由度繞質(zhì)心運動的轉(zhuǎn)動方程完整描述。考慮飛行器在再入過程為無動力飛行(總是正確的),RLV姿態(tài)運動方程可以描述為

式中:α為飛行器的迎角;β為側(cè)滑角;μ為傾側(cè)角;p為滾轉(zhuǎn)角速率;q為俯仰角速率;r為偏航角速率;ˉL為滾轉(zhuǎn)通道控制力矩;ˉM為俯仰通道控制力矩;ˉN為偏航通道控制力矩;γ為航跡角;m為飛行器質(zhì)量;v為飛行速度;L為氣動升力;Y為側(cè)向力;Ixx、Iyy、Izz、Ixz為飛行器的轉(zhuǎn)動慣量;g為重力加速度。
注1 本文RLV再入動態(tài)模型是基于如下假設(shè)[1,16]建立的:
假設(shè)1 在再入飛行階段,地球自轉(zhuǎn)速率對飛行器的影響可忽略不計。
假設(shè)2 地球大氣層視為靜止的,且其質(zhì)量變化忽略不計。
1.2 姿態(tài)控制模型
RLV再入動態(tài)模型具有多變量耦合、強非線性等特點,使得再入姿態(tài)跟制器的設(shè)計變得復(fù)雜。為便于設(shè)計RLV再入姿態(tài)控制器,將飛行器模型式(1)轉(zhuǎn)化為如下形式姿態(tài)控制模型:

式中:Ω=[α,β,μ]T為飛行器姿態(tài)角向量;w=[p,q,r]T為飛行器姿態(tài)角速率向量;u=[ˉL,ˉM,ˉN]T為控制輸入向量;y=Ω 為輸出向量;ΔF=[ΔF1,ΔF2,ΔF3]T為飛行器氣動參數(shù)攝動引起的參數(shù)不確定性項;ΔD=[ΔD1,ΔD2,ΔD3]T為系統(tǒng)外 界 干 擾 綜 合 項,ΔD =I-1(ΔD0-ΔI˙w-MΔIw),I和M 為矩陣(其具體表達式在下文給出),ΔI為參數(shù)不確定性,ΔD0為外界干擾;FΩ=



注2 考慮RLV的背景意義和實際飛行情形,假設(shè)3和假設(shè)4總是合理的。在實際再入姿態(tài)控制中,飛行器函數(shù)矩陣的上下界并不需要確定得到。同時,假設(shè)3和假設(shè)4確保了系統(tǒng)函數(shù)矩陣的非奇異性。
本文旨在針對RLV再入動態(tài)模型式(1)和式(2),給定任意滿足假設(shè)3的期望指令信號,設(shè)計合理的再入姿態(tài)控制律,使得RLV能跟蹤期望指令信號,且飛行器閉環(huán)控制系統(tǒng)的穩(wěn)定性及姿態(tài)跟蹤誤差的有界性能得以保證。
2 RLV再入姿態(tài)控制策略
2.1 區(qū)間二型模糊系統(tǒng)
利用單值模糊器、乘積推理機及中心集降階器,可得到區(qū)間一型模糊集輸出,該輸出可由2個端點yl、yr表示。通過計算和的均值,去模糊化區(qū)間集,得到去模糊化的清晰輸出為

2.2 再入姿態(tài)控制器設(shè)計
步驟1 外環(huán)姿態(tài)角控制器。
定義姿態(tài)角跟蹤誤差為eΩ=Ω-Ωd∈R3×1,其中Ωd=[αd,βd,μd]T為系統(tǒng)給定姿態(tài)角跟蹤信號,且其導(dǎo)數(shù)Ω·d有界。
由飛行器姿態(tài)控制模型式(2),得到RLV姿態(tài)角跟蹤誤差動態(tài)為

定義姿態(tài)角子系統(tǒng)的滑模面為SΩ=DΩeΩ=DΩ(Ω-Ωd),則



步驟2 內(nèi)環(huán)姿態(tài)角速率控制器。
現(xiàn)設(shè)計虛擬控制輸入wd。定義姿態(tài)角速率跟蹤誤差ew=w-wd∈R3×1,其中wd=[pd,qd,rd]T為期望姿態(tài)角速率跟蹤信號,且其導(dǎo)數(shù)˙wd有界。
基于飛行器控制模型式(2),姿態(tài)角速率的跟蹤誤差方程可表示為

類似地,定義姿態(tài)角速率子系統(tǒng)滑模面為Sw=Dwew=Dw(w-wd),可得滑模面動態(tài)為


3 穩(wěn)定性分析
定理1 對于飛行器控制模型式(2),且滿足假設(shè)3、假設(shè)4和引理1,飛行器姿態(tài)角和姿態(tài)角速率子系統(tǒng)的控制律分別設(shè)計為式(13)和式(26),并選取參數(shù)向量自適應(yīng)更新律分別為式(16)、式(18)和式(28)、式(30),則RLV閉環(huán)控制系統(tǒng)是半全局一致有界穩(wěn)定的,且飛行器姿態(tài)角跟蹤誤差能收斂于原點附近的一個小鄰域內(nèi)。
證明 選取Lyapunov函數(shù)為


類似地,結(jié)合式(28)、式(30)、式(36)和不等式(38)證明,可以得到即

綜上,整理式(40)和式(41)可得到

式(42),可得


4 仿真驗證
為驗證所提控制策略的有效性,應(yīng)用所提出的控制方法針對RLV再入動態(tài)模型進行仿真實驗。
4.1 參數(shù)設(shè)定
再入飛行器轉(zhuǎn)動慣量值分別設(shè)定為Ixx=434 270 slug·ft2,,Ixz=17 880 slug· ft2,Iyy=961 200 slug·ft2和Izz=1 131 541 slug·ft2,1 ft=0.304 8m,1 slug·ft2=14.593 9 kg·m2。飛行器其他初始條件如表1所示。
仿真中,選取以高斯型隸屬度函數(shù)為主設(shè)計的區(qū)間二型模糊系統(tǒng)。飛行器控制器待設(shè)計參數(shù)分別設(shè)置如下:KΩ1=diag(1,0.8,1),Kw1=18I3×3,KΩ2=diag(1.6,1.4.1.6),Kw2=15I3×3,Kf=0.1I3×3;λΩ1=λΩr=cΩl=cΩr=[1.5,1.2,1.5]T,λwl=λwr=cwl=cwr=[1,1,1;1,1,1;1,1,1],δ=0.001[1,1,1]T;mΩl=mΩr=bΩl=bΩr=[1,1,1.2]T,mwl=mwr=bwl=bwr=[1.1,1,0.9],τΩl=τΩr=dΩl=dΩr=[1.4,1.4,1.2;1.4,1.4,1.2;1.4,1.4,1.2],τwl=τwr=dwl=dwr=[1.2,1.2,1.2;1.2,1.2,1.2;1.2,1.2,1.2]。

表1 再入RLV初始參數(shù)值Tab le 1 Initial param eter values of reentry RLV
此外,為驗證RLV再入姿態(tài)控制器的魯棒性能,針對飛行器控制模型式(2)加入?yún)?shù)不確定性ΔF=0.1FΩ和外界干擾為
4.2 仿真分析
為了更好地驗證本文所設(shè)計姿態(tài)控制方法的有效性及跟蹤性能,在同樣的條件(模型和初始情況)下與傳統(tǒng)的滑模控制方法進行仿真實驗對比。仿真結(jié)果如圖1~圖4所示。

圖1 姿態(tài)角跟蹤響應(yīng)曲線Fig.1 Attitude angle tracking response curves
圖1為迎角、側(cè)滑角和傾側(cè)角跟蹤曲線。由圖1可以看出,在飛行器模型的參數(shù)不確定性和外界干擾的綜合影響下,所提出的姿態(tài)控制策略能使得再入RLV在很短時間(約2 s)內(nèi)實現(xiàn)對期望指令的穩(wěn)定跟蹤,且其穩(wěn)定跟蹤時間快于傳統(tǒng)滑模控制方法。
圖2為迎角、側(cè)滑角和傾側(cè)角跟蹤誤差變化曲線。圖2表明,所提出的控制策略能夠以更高的精度對期望指令信號進行跟蹤。
圖3為滾轉(zhuǎn)角、俯仰角和偏航角速率變化曲線。由圖3可知,在所設(shè)計控制器作用下,再入飛行器三通道角速率的變化更加平滑。
圖4為飛行器的滾轉(zhuǎn)、俯仰和偏航三通道所需力矩響應(yīng)曲線。由圖4可知,相比于傳統(tǒng)的滑模控制方法,RLV在所提出的姿態(tài)跟蹤策略下能產(chǎn)生更加平滑的控制力矩且無抖振現(xiàn)象。

圖2 姿態(tài)角跟蹤誤差變化曲線Fig.2 Attitude angle tracking error changing curves

圖3 姿態(tài)角速率變化曲線Fig.3 Attitude angular rate changing curves
5 結(jié) 論
本文針對RLV姿態(tài)跟蹤控制問題,考慮RLV再入動態(tài)模型的參數(shù)不確定性和外界干擾情形,基于區(qū)間二型自適應(yīng)模糊技術(shù)提出一種再入姿態(tài)滑模控制策略。
1)該控制策略引入?yún)^(qū)間二型模糊系統(tǒng)對飛行器姿態(tài)角和角速率子系統(tǒng)非線性項進行逼近,有效地解決了RLV再入動態(tài)模型的強非線性問題。
2)結(jié)合滑模控制方法及自適應(yīng)更新律設(shè)計,使得所設(shè)計控制器具有較強的魯棒性。同時,利用Lyapunov方法在理論上嚴(yán)格證明了RLV閉環(huán)控制系統(tǒng)的穩(wěn)定性。
3)通過對飛行器再入模型的仿真對比驗證,所設(shè)計的再入姿態(tài)控制器在RLV再入動態(tài)模型參數(shù)不確定性和外界干擾的影響下,能夠有效地實現(xiàn)對期望指令信號穩(wěn)定且快速地跟蹤,且相比于傳統(tǒng)滑模控制方法具有更好的跟蹤控制性能。
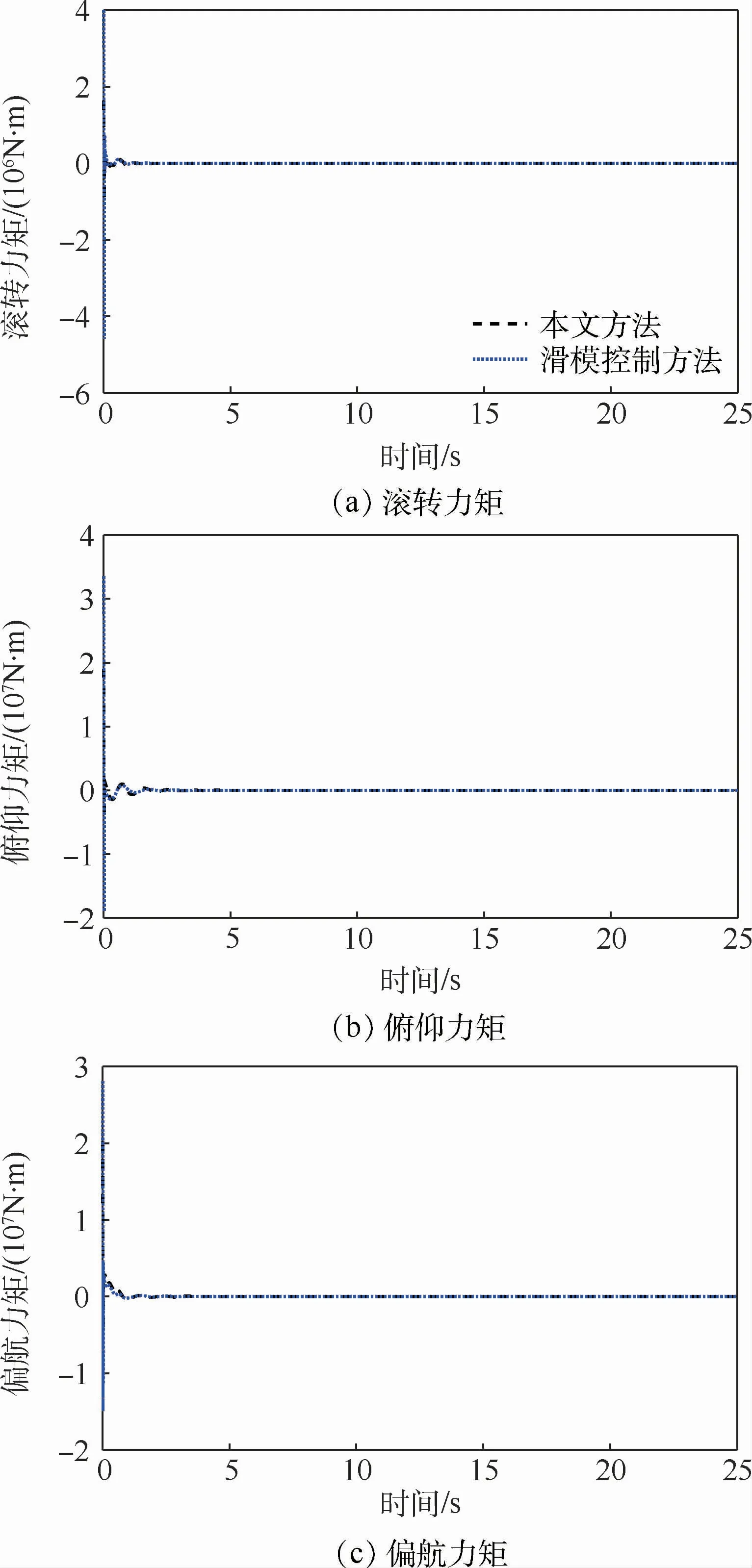
圖4 RLV力矩響應(yīng)曲線Fig.4 Torque response curves of RLV
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19