同步式GPS欺騙干擾信號(hào)生成技術(shù)研究與設(shè)計(jì)
2020-06-01 09:04:38柳亞川寇艷紅
北京航空航天大學(xué)學(xué)報(bào) 2020年4期
關(guān)鍵詞:信號(hào)
柳亞川,寇艷紅
(北京航空航天大學(xué) 電子信息工程學(xué)院,北京100083)
目前,無(wú)人機(jī)技術(shù)日趨成熟,應(yīng)用迅速增多,飛行頻次和飛行范圍急劇增加,在提供方便的同時(shí)對(duì)于飛行安全提出了巨大的挑戰(zhàn)[1]。民用無(wú)人機(jī)價(jià)格低廉、購(gòu)買途徑眾多、操作門檻低、對(duì)起飛環(huán)境要求低,當(dāng)前出現(xiàn)了大量黑飛無(wú)人機(jī),一些未經(jīng)審核的黑飛事件造成了嚴(yán)重的惡性影響,因此有必要對(duì)無(wú)人機(jī)實(shí)施監(jiān)測(cè),必要時(shí)進(jìn)行強(qiáng)制管控。從GPS欺騙干擾技術(shù)著手管制無(wú)人機(jī),具有較強(qiáng)的威脅性和隱蔽性,正逐漸成為當(dāng)下無(wú)人機(jī)管制研究領(lǐng)域的熱點(diǎn)之一[2]。
GPS欺騙式干擾可分為轉(zhuǎn)發(fā)式欺騙干擾和生成式欺騙干擾[3-5]:前者通過(guò)對(duì)真實(shí)衛(wèi)星信號(hào)的延遲和轉(zhuǎn)發(fā)達(dá)到欺騙目的,后者則通過(guò)自主生成攜帶虛假導(dǎo)航信息的衛(wèi)星導(dǎo)航信號(hào)實(shí)現(xiàn)欺騙。根據(jù)所生成欺騙信號(hào)是否與真實(shí)衛(wèi)星信號(hào)同步,又可將生成式欺騙干擾分為異步生成式與同步生成式欺騙干擾[6-8]。異步生成式欺騙干擾技術(shù)相對(duì)較為成熟,可由衛(wèi)星導(dǎo)航射頻信號(hào)模擬器實(shí)現(xiàn),但一般需要借助于壓制式干擾阻斷接收機(jī)對(duì)真實(shí)衛(wèi)星信號(hào)的跟蹤,在確保干擾區(qū)域內(nèi)接收機(jī)重新進(jìn)入搜索捕獲狀態(tài)后才可有效實(shí)施欺騙干擾;而同步生成式欺騙干擾則可在接收機(jī)正常跟蹤真實(shí)衛(wèi)星信號(hào)的狀態(tài)下無(wú)需壓制而引導(dǎo)接收機(jī)逐漸偏離真實(shí)信號(hào),控制目標(biāo)接收機(jī)的定位測(cè)速,因而更難以被目標(biāo)接收機(jī)所察覺(jué)。由于同步生成式欺騙干擾技術(shù)較為復(fù)雜,目前公開(kāi)的相關(guān)文獻(xiàn)中,大多只是通過(guò)理論分析和軟件仿真對(duì)欺騙干擾進(jìn)行驗(yàn)證[9-11],缺乏真實(shí)場(chǎng)景下的設(shè)計(jì)驗(yàn)證以及實(shí)驗(yàn)測(cè)試[12]。
本文旨在研究同步式GPS欺騙干擾信號(hào)生成技術(shù),建立了同步GPS欺騙信號(hào)的數(shù)學(xué)模型,給出了信號(hào)參數(shù)仿真、信號(hào)同步及誘騙方法;在此基礎(chǔ)上,基于數(shù)字信號(hào)處理(Digital Signal Processing,DSP)芯片和現(xiàn)場(chǎng)可編程邏輯門陣列(Field Programmable Gate Array,F(xiàn)PGA)架構(gòu)研制了一種小型化的同步生成式GPS欺騙干擾源。最終通過(guò)室內(nèi)商用接收機(jī)測(cè)試和室外商用無(wú)人機(jī)測(cè)試,在接收機(jī)和無(wú)人機(jī)鎖定真實(shí)衛(wèi)星信號(hào)以及不使用高功率干擾壓制的前提下,開(kāi)啟干擾源,發(fā)射欺騙信號(hào),成功誘使接收機(jī)和無(wú)人機(jī)逐漸偏離真實(shí)定位測(cè)速結(jié)果而輸出預(yù)設(shè)的定位測(cè)速結(jié)果,從而驗(yàn)證了信號(hào)模型和誘騙方法的正確性以及所設(shè)計(jì)同步式GPS欺騙干擾源設(shè)備的有效性。
1 同步生成式GPS欺騙干擾
1.1 GPS欺騙干擾源總體設(shè)計(jì)
在實(shí)驗(yàn)室已有的異步生成式GPS欺騙干擾源基礎(chǔ)上[13],本文所設(shè)計(jì)的便攜式小型化同步生成式GPS欺騙干擾源組成框圖如圖1所示(1PPS為秒脈沖),主要由信號(hào)處理模塊、參考接收模塊、上變頻及射頻調(diào)理模塊、上位機(jī)主控模塊組成。信號(hào)處理模塊采用DSP+FPGA的架構(gòu),完成欺騙信號(hào)仿真計(jì)算并生成中頻欺騙信號(hào);參考接收模塊以某款授時(shí)型接收機(jī)為基礎(chǔ),完成干擾源系統(tǒng)時(shí)和真實(shí)衛(wèi)星系統(tǒng)時(shí)的同步,并提供時(shí)基信號(hào)、時(shí)間信息、位置信息和導(dǎo)航參數(shù)等給信號(hào)處理模塊;上變頻及射頻調(diào)理模塊完成中頻信號(hào)的上變頻和信號(hào)調(diào)理;上位機(jī)主控模塊實(shí)現(xiàn)人機(jī)交互以及與導(dǎo)航誘騙系統(tǒng)中其他組件(如目標(biāo)偵測(cè)系統(tǒng))的數(shù)據(jù)交互和命令控制。
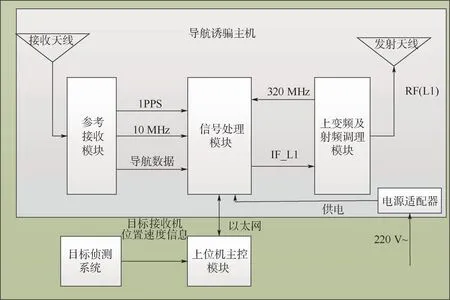
圖1 同步生成式GPS欺騙干擾源組成框圖Fig.1 Block diagram of synchronous generator GPS spoofer
1.2 同步生成式GPS欺騙干擾信號(hào)的生成
1.2.1 欺騙信號(hào)模型
在GPS系統(tǒng)時(shí)t時(shí)刻欺騙干擾源所發(fā)射的射頻信號(hào)可表示為[13-14]

式中:t為信號(hào)發(fā)射時(shí)刻的GPS系統(tǒng)時(shí);N(t)為對(duì)應(yīng)t時(shí)刻的目標(biāo)接收機(jī)處可見(jiàn)衛(wèi)星數(shù);Pjs(t)為第j顆可見(jiàn)星信號(hào)功率;Cj(t-τj(t))為第j顆可見(jiàn)星的偽隨機(jī)碼;τj(t)為t時(shí)刻偽隨機(jī)碼傳播延時(shí);Dj(t-τj(t))為第j顆可見(jiàn)星導(dǎo)航電文數(shù)據(jù);φj(t)為第j顆可見(jiàn)星載波相位;n(t)為隨機(jī)噪聲。
1.2.2 初始同步階段的信號(hào)參數(shù)計(jì)算
同步生成式GPS欺騙干擾源能夠生成當(dāng)前目標(biāo)接收機(jī)所有可見(jiàn)星的同步欺騙信號(hào),欺騙信號(hào)到達(dá)目標(biāo)接收機(jī)天線相位中心處的功率、碼相位、載波多普勒和載波相位與真實(shí)信號(hào)的對(duì)齊誤差要限制在一定的范圍之內(nèi)。同步生成式GPS欺騙干擾源根據(jù)本地授時(shí)型接收機(jī)提供的信息和時(shí)基信號(hào)計(jì)算并控制所仿真各歷元時(shí)刻各顆衛(wèi)星欺騙信號(hào)的功率、碼相位、載波多普勒和載波相位參數(shù),生成相應(yīng)的射頻欺騙信號(hào)通過(guò)發(fā)射天線向目標(biāo)空域發(fā)射出去。
1)功率
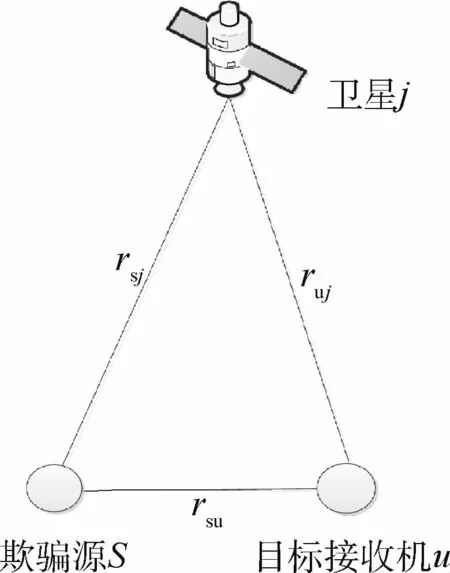
圖2 功率計(jì)算示意圖Fig.2 Schematic diagram of power calculation
圖2為功率估計(jì)示意圖,其中rsj為衛(wèi)星發(fā)射天線相位中心到欺騙干擾源接收天線相位中心的距離,ruj為衛(wèi)星發(fā)射天線相位中心到目標(biāo)接收機(jī)接收天線相位中心的距離,rsu為欺騙干擾源發(fā)射天線相位中心到目標(biāo)接收機(jī)接收天線相位中心的距離。干擾源與目標(biāo)接收機(jī)均使用全向接收天線。
通常rsj和ruj均遠(yuǎn)大于rsu,到達(dá)欺騙干擾源接收天線相位中心和目標(biāo)接收機(jī)接收天線相位中心的衛(wèi)星信號(hào)功率近似相等,因此由干擾源處衛(wèi)星信號(hào)功率估計(jì)目標(biāo)接收機(jī)處衛(wèi)星信號(hào)功率。
干擾源仿真的第j顆可見(jiàn)星信號(hào)功率計(jì)算公式為

式中:Pju(t)為t時(shí)刻真實(shí)衛(wèi)星信號(hào)功率,可由本地授時(shí)型接收機(jī)估計(jì);ΔPj(t)為根據(jù)同步誘騙策略需要添加的欺騙信號(hào)相對(duì)于真實(shí)衛(wèi)星信號(hào)功率的增量;GT(t)為欺騙干擾源發(fā)射天線增益;λ為信號(hào)波長(zhǎng)。
2)碼相位
t時(shí)刻干擾源所仿真第j顆可見(jiàn)星的碼相位延遲可由下式進(jìn)行估計(jì):欺騙信號(hào)相對(duì)真實(shí)衛(wèi)星信號(hào)碼相位的增量。

式中:F=-4.442 807 633×10-10s/m;e為衛(wèi)星軌道偏心率;A為衛(wèi)星軌道的半長(zhǎng)軸;Ek(t)為衛(wèi)星軌道的偏近點(diǎn)角[15]。
在初始同步與功率增強(qiáng)階段,以及動(dòng)態(tài)調(diào)整階段,碼相位增量Δτj(t)的取值不同,具體分析見(jiàn)1.2.3節(jié)。
區(qū)別于普通模擬器,如圖3所示,同步生成式GPS欺騙干擾源需要精確控制到達(dá)目標(biāo)的信號(hào)狀態(tài),相應(yīng)地需要精確控制欺騙信號(hào)發(fā)射時(shí)刻(GPS系統(tǒng)時(shí))。由干擾源本地授時(shí)型接收機(jī)可以獲得其接收天線接收真實(shí)衛(wèi)星信號(hào)的時(shí)刻,而該時(shí)刻到干擾源發(fā)射天線發(fā)射欺騙信號(hào)時(shí)刻的延時(shí)td(稱為誘騙系統(tǒng)信號(hào)處理延時(shí))則可事先標(biāo)定,然后在信號(hào)產(chǎn)生過(guò)程中予以補(bǔ)償。
3)載波多普勒

圖3 碼相位計(jì)算示意圖Fig.3 Schematic diagram of code phase calculation
1.2.3 信號(hào)同步及誘騙方法
1)時(shí)基同步
欺騙信號(hào)與真實(shí)衛(wèi)星信號(hào)同步精度取決于干擾源的欺騙信號(hào)參數(shù)計(jì)算和控制精度以及干擾源控制信號(hào)發(fā)送時(shí)刻的精度。時(shí)基同步是為了保證欺騙干擾源與真實(shí)衛(wèi)星系統(tǒng)時(shí)保持時(shí)間上的同步,并能夠標(biāo)定和校準(zhǔn)從接收衛(wèi)星信號(hào)到發(fā)送欺騙信號(hào)的時(shí)延td。
為了實(shí)現(xiàn)時(shí)基同步的功能,本文方案采用一個(gè)本地授時(shí)型接收機(jī),能夠提供精度滿足要求的馴服后的基準(zhǔn)時(shí)鐘和1PPS信號(hào)。干擾源通過(guò)本地授時(shí)型接收機(jī)讀取當(dāng)前GPS時(shí),并利用1PPS信號(hào)和10 MHz時(shí)鐘作為FPGA數(shù)字信號(hào)合成和射頻模塊信號(hào)輸出的時(shí)基和時(shí)鐘源,實(shí)現(xiàn)干擾源本地時(shí)鐘和真實(shí)衛(wèi)星系統(tǒng)時(shí)的同步;同時(shí)依據(jù)1.2.1節(jié)的欺騙信號(hào)模型和信號(hào)參數(shù)估計(jì)方法,計(jì)算導(dǎo)航觀測(cè)量和電文參數(shù),并通過(guò)高階直接數(shù)字頻率合成(Direct Digital Synthesis,DDS)技術(shù)精確控制信號(hào)狀態(tài),高階DDS使用FPGA片內(nèi)資源,進(jìn)行多級(jí)調(diào)整,精確地模擬由衛(wèi)星和接收機(jī)相對(duì)運(yùn)動(dòng)引起的多普勒變化,保證欺騙信號(hào)到達(dá)目標(biāo)接收機(jī)接收天線相位中心時(shí)與真實(shí)信號(hào)的相位狀態(tài)在成功誘騙所允許的誤差范圍之內(nèi)。
2)目標(biāo)接收機(jī)跟蹤環(huán)路的俘獲

圖4 欺騙信號(hào)俘獲跟蹤環(huán)路示意圖Fig.4 Schematic diagram of tracking loop captured by spoofing signal

鑒于目前大多數(shù)GPS接收機(jī)所采用的3階或3階以下載波跟蹤鎖相環(huán)路(PLL),以及恒定速度的突變會(huì)引起欺騙信號(hào)多普勒突變,易被接收機(jī)檢測(cè)識(shí)別[15],因此本設(shè)計(jì)欺騙信號(hào)采用初始速度為0的勻加速動(dòng)態(tài)調(diào)整策略,并在速度達(dá)到最大值后,保持不變,即

式中:vmax為最大速度;a為加速度,其大小受限于接收機(jī)PLL噪聲帶寬以及PLL更新周期。
欺騙信號(hào)動(dòng)態(tài)調(diào)整過(guò)程,若加速度和最大速度增大,則需增大欺騙信號(hào)的功率保證成功欺騙目標(biāo)接收機(jī)[16],因此欺騙信號(hào)加速度和最大速度不應(yīng)設(shè)置過(guò)大。
2 實(shí)驗(yàn)分析
為了驗(yàn)證上述模型的正確性及方法和設(shè)計(jì)的可行性,本文首先在室內(nèi)利用商用接收機(jī)進(jìn)行了靜態(tài)誘騙實(shí)驗(yàn),然后在室外利用商用無(wú)人機(jī)分別進(jìn)行了靜態(tài)和動(dòng)態(tài)誘騙實(shí)驗(yàn)。其中室外無(wú)人機(jī)動(dòng)態(tài)誘騙實(shí)驗(yàn)參數(shù)具體設(shè)置見(jiàn)2.2節(jié)無(wú)人機(jī)動(dòng)態(tài)誘騙測(cè)試部分;而室內(nèi)商用接收機(jī)及室外無(wú)人機(jī)靜態(tài)誘騙實(shí)驗(yàn)參數(shù)設(shè)置如下:
1)初始同步與功率增強(qiáng)階段
欺騙信號(hào)初始仿真位置為目標(biāo)接收機(jī)真實(shí)位置pu(t+τsu),仿真的接收機(jī)動(dòng)態(tài)速度為0,加速度為0;初始欺騙信號(hào)功率低于真實(shí)衛(wèi)星信號(hào)功率,功率增加速率為2 dB/s,持續(xù)時(shí)間為8 s。
2)動(dòng)態(tài)調(diào)整階段
欺騙信號(hào)功率保持初始同步階段最大功率,改變欺騙信號(hào)所仿真的目標(biāo)無(wú)人機(jī)的動(dòng)態(tài),在地心固地坐標(biāo)系(ECEF)直角坐標(biāo)系下x方向初始速度為0,加速度為0.2 m/s2,最大速度為3.8m/s,y方向和z方向速度恒為0。
2.1 室內(nèi)商用接收機(jī)誘騙測(cè)試
1)碼相位同步精度測(cè)試
使用2個(gè)商用接收機(jī)(Trimble Mini-TTMGG和NovAtel OEM615)分別接收真實(shí)衛(wèi)星信號(hào)和干擾源欺騙信號(hào),輸出秒脈沖,使用TDS3052B示波器測(cè)試2個(gè)秒脈沖的對(duì)齊精度,接收干擾源欺騙信號(hào)接收機(jī)輸出的秒脈沖與接收真實(shí)衛(wèi)星信號(hào)接收機(jī)輸出的秒脈沖對(duì)齊誤差的測(cè)試結(jié)果截圖如圖5所示,測(cè)試階段為初始同步與功率增強(qiáng)階段。
多次測(cè)試結(jié)果表明2個(gè)接收機(jī)輸出的秒脈沖對(duì)齊誤差小于100 ns,即0.1個(gè)碼片;這保證了干擾源產(chǎn)生的欺騙信號(hào)與真實(shí)衛(wèi)星信號(hào)到達(dá)目標(biāo)接收機(jī)時(shí)的時(shí)間同步[2,10,17]。
2)載噪比測(cè)試
在一定的熱噪聲背景下,衛(wèi)星信號(hào)絕對(duì)功率的變化直接體現(xiàn)在射頻信號(hào)載噪比的變化上[18],本文通過(guò)測(cè)試接收機(jī)接收信號(hào)載噪比變化驗(yàn)證欺騙信號(hào)功率變化對(duì)接收機(jī)跟蹤環(huán)路的影響,測(cè)試階段為初始同步與功率增強(qiáng)階段。
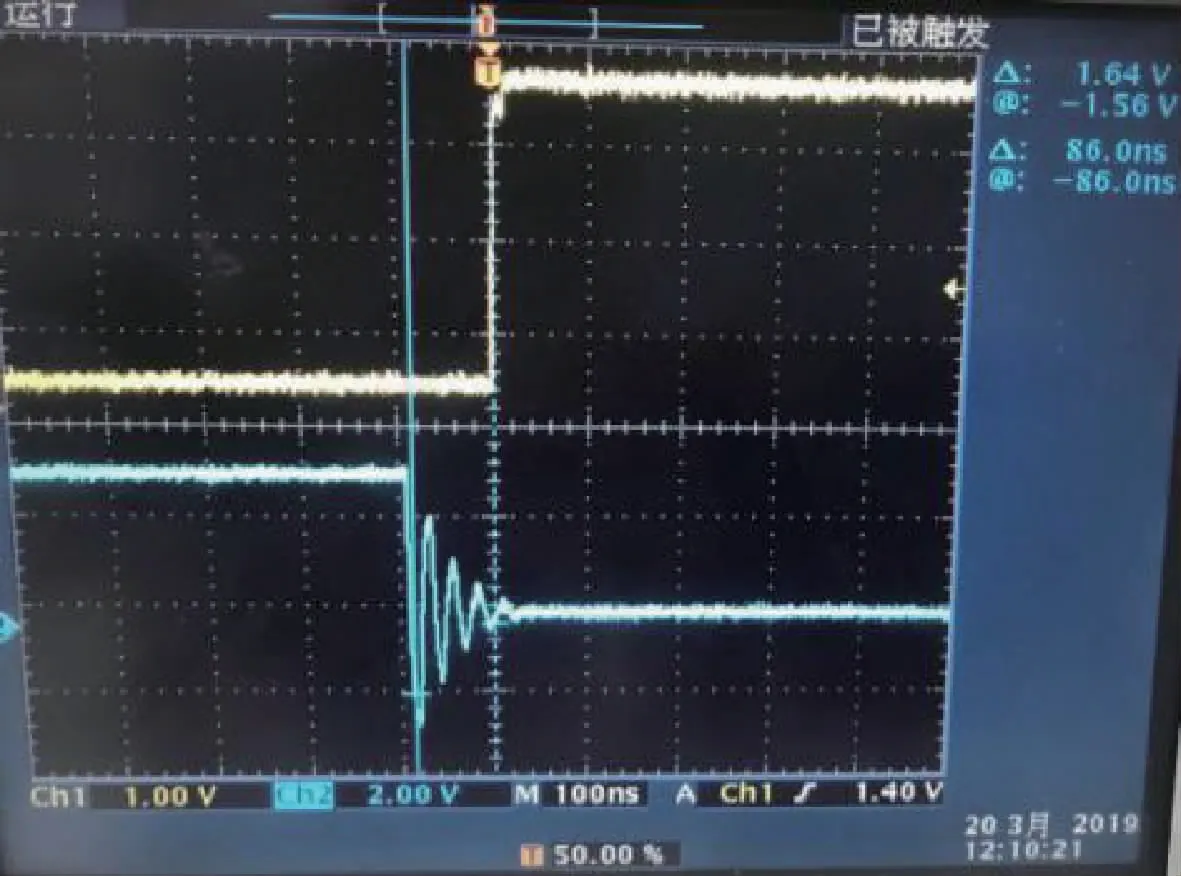
圖5 秒脈沖誤差測(cè)試結(jié)果Fig.5 Test results of 1PPS error
采用北京衛(wèi)信杰科技發(fā)展有限公司的W 220接收機(jī)作為室內(nèi)測(cè)試的目標(biāo)接收機(jī),其射頻輸入端同時(shí)連接干擾源射頻輸出與實(shí)驗(yàn)室屋頂天線;起初只接收真實(shí)衛(wèi)星信號(hào),待接收機(jī)穩(wěn)定輸出真實(shí)坐標(biāo)(39.978 635°N,116.344 224°E,70mH)后,在不對(duì)此接收機(jī)進(jìn)行壓制干擾的前提下,開(kāi)啟干擾源,首先輸出低功率的同步欺騙信號(hào),可觀察到接收機(jī)定位不受影響,定位沒(méi)有中斷;然后在第5 s開(kāi)始逐步增加干擾信號(hào)功率,每秒增加2 dB,持續(xù)8 s,隨后保持功率不變。讀取接收機(jī)所記錄的每秒一次的可見(jiàn)星PRN8、PRN21、PRN26載噪比如圖6所示。
以PRN8載噪比為例,由圖6可見(jiàn),在第1~4 s干擾源發(fā)射低功率欺騙信號(hào),接收機(jī)所跟蹤真實(shí)衛(wèi)星信號(hào)的載噪比均不超過(guò)43 dB·Hz;第5~6 s欺騙信號(hào)功率增加但仍低于真實(shí)衛(wèi)星信號(hào)功率,接收機(jī)跟蹤環(huán)路保持鎖定真實(shí)衛(wèi)星信號(hào),所估計(jì)載噪比沒(méi)有明顯變化;第7~12 s欺騙信號(hào)功率高于真實(shí)衛(wèi)星信號(hào)功率,接收機(jī)跟蹤環(huán)路鎖定欺騙信號(hào),因此接收機(jī)所估計(jì)載噪比隨欺騙信號(hào)功率提高而提高。值得注意的是,實(shí)驗(yàn)中發(fā)現(xiàn)欺騙信號(hào)高功率入侵誘騙成功的概率更高,而低功率入侵有時(shí)會(huì)引起定位中斷,其原因是干擾源所發(fā)射欺騙信號(hào)很難做到與真實(shí)衛(wèi)星信號(hào)載波相位完全同步,在相差較大甚至反相的情況下容易引起信號(hào)短暫失鎖。
3)接收機(jī)定位測(cè)速誘騙測(cè)試
初始設(shè)置及信號(hào)功率變化與載噪比測(cè)試設(shè)置一致,隨后從第30 s開(kāi)始逐步增加干擾源所仿真目標(biāo)在ECEF直角坐標(biāo)系下x方向上的速度,初始速度為0,加速度為0.2m/s2,持續(xù)時(shí)間為19 s,y方向和z方向速度保持為0,實(shí)驗(yàn)結(jié)果如圖7所示。由圖中可知,接收機(jī)定位測(cè)速結(jié)果與預(yù)設(shè)軌跡速度相吻合,接收機(jī)被成功誘騙到干擾源所預(yù)設(shè)的定位測(cè)速結(jié)果。

圖6 載噪比測(cè)試結(jié)果Fig.6 Test results of carrier to noise ratio
2.2 室外無(wú)人機(jī)誘騙測(cè)試
1)無(wú)人機(jī)靜態(tài)誘騙測(cè)試
實(shí)驗(yàn)場(chǎng)地為北京航空航天大學(xué),使用的無(wú)人機(jī)為大疆創(chuàng)新科技有限公司的PHANTOM 4 PRO

圖7 接收機(jī)定位測(cè)速結(jié)果與預(yù)設(shè)軌跡速度的比較Fig.7 Comparison of receiver position and velocity results with preset trajectory and velocity
無(wú)人機(jī)。首先使無(wú)人機(jī)接收真實(shí)衛(wèi)星信號(hào),在定位之后且不對(duì)無(wú)人機(jī)進(jìn)行壓制的前提下,打開(kāi)干擾源發(fā)射欺騙信號(hào),誘騙方法同室內(nèi)測(cè)試相同。采用DJI Assistant 2調(diào)參軟件來(lái)觀測(cè)無(wú)人機(jī)傳感器給出的飛行軌跡,軟件所顯示的無(wú)人機(jī)定位位置偏離起始點(diǎn)的距離隨運(yùn)行時(shí)間的變化如圖8所示。可見(jiàn)無(wú)人機(jī)定位一直沒(méi)有中斷,在開(kāi)啟干擾源后逐步鎖定到欺騙信號(hào),從圖8中的第72 s開(kāi)始其輸出的定位位置發(fā)生移動(dòng)。由于無(wú)法從DJI Assistant 2軟件導(dǎo)出無(wú)人機(jī)定位軌跡的記錄數(shù)據(jù),本文同時(shí)使用了W 220接收機(jī)與無(wú)人機(jī)一起進(jìn)行誘騙實(shí)驗(yàn)。圖9(a)對(duì)比了W 220接收機(jī)定位軌跡和干擾源預(yù)設(shè)欺騙軌跡;圖9(b)對(duì)比了無(wú)人機(jī)偏離起始點(diǎn)距離(由圖8讀數(shù)繪制而成)以及W220接收機(jī)定位結(jié)果偏離起始點(diǎn)的距離。

圖8 DJIAssistant 2所顯示無(wú)人機(jī)偏離起始點(diǎn)的距離Fig.8 Distance of UAV deviated from origin disp layed by DJIAssistant 2
由圖8和圖9可見(jiàn),W220接收機(jī)輸出的定位測(cè)速結(jié)果與預(yù)設(shè)的欺騙軌跡相符合;無(wú)人機(jī)配套軟件所輸出偏離起始點(diǎn)的距離與接收機(jī)定位結(jié)果偏離起始點(diǎn)距離相符合,可說(shuō)明在開(kāi)啟干擾源后,無(wú)人機(jī)定位未中斷,由鎖定真實(shí)衛(wèi)星信號(hào)轉(zhuǎn)而鎖定欺騙信號(hào),并且輸出干擾源預(yù)設(shè)的欺騙軌跡,無(wú)人機(jī)欺騙成功。
2)無(wú)人機(jī)動(dòng)態(tài)誘騙測(cè)試
無(wú)人機(jī)動(dòng)態(tài)誘騙實(shí)驗(yàn)設(shè)備及環(huán)境如圖10所示,實(shí)驗(yàn)場(chǎng)地為北京市沙河非禁飛區(qū),通過(guò)無(wú)人機(jī)定位,顯示當(dāng)?shù)卣鎸?shí)坐標(biāo)為(40.176 698°N,116.269 926°E)。
圖11(a)為無(wú)人機(jī)動(dòng)態(tài)誘騙實(shí)驗(yàn)的場(chǎng)景設(shè)計(jì)(VUAV為 無(wú) 人 機(jī) 初 始 速 度,Vs為 欺 騙 速 度),圖11(b)~(d)給出了實(shí)驗(yàn)過(guò)程中無(wú)人機(jī)通過(guò)關(guān)鍵軌跡點(diǎn)的視頻截圖。
首先通過(guò)無(wú)人機(jī)遙控軟件DJI GO 4預(yù)設(shè)無(wú)人機(jī)勻速由A點(diǎn)(40.176 698°N,116.269 926°E)飛往B點(diǎn)(40.176 582°N,116.269 952°E),飛行速度為0.3m/s。在不對(duì)無(wú)人機(jī)進(jìn)行壓制干擾的前提下,開(kāi)啟干擾源,首先輸出低功率的同步欺騙信號(hào),可觀察到無(wú)人機(jī)由預(yù)設(shè)的起始位置即圖11(b)中的A點(diǎn)向預(yù)設(shè)的B點(diǎn)方向正常飛行(若欺騙信號(hào)引起無(wú)人機(jī)接收機(jī)失鎖,則無(wú)人機(jī)會(huì)懸停),在飛行時(shí)刻第5 s開(kāi)始逐步增加欺騙信號(hào)功率,每秒增加2 dB,持續(xù)8 s,隨后保持功率不變,第12 s無(wú)人機(jī)飛行至C點(diǎn)(40.176653°N,116.269 930°E),如圖11(c)所示;隨即逐步增大干擾源所仿真目標(biāo)在東北天坐標(biāo)系下的東向速度Ve,初始速度為0,加速度為0.2m/s2,持續(xù)時(shí)間為5 s,北向和天向速度為0;可觀測(cè)到無(wú)人機(jī)飛向D點(diǎn)(40.176707°N,116.269967°E),偏離預(yù)設(shè)飛行路徑,如圖11(d)所示,說(shuō)明欺騙信號(hào)獲得了跟蹤環(huán)路主導(dǎo)權(quán),無(wú)人機(jī)誘騙成功。因?yàn)闊o(wú)法從DJI Assistant 2軟件導(dǎo)出無(wú)人機(jī)定位信息,所以無(wú)法對(duì)無(wú)人機(jī)飛行軌跡進(jìn)行進(jìn)一步的數(shù)據(jù)分析。

圖9 軌跡和偏離起始點(diǎn)的距離Fig.9 Trajectory and distance deviated from origin

圖10 無(wú)人機(jī)外場(chǎng)實(shí)驗(yàn)設(shè)備及環(huán)境Fig.10 UAV field experimental equipment and environment

圖11 無(wú)人機(jī)動(dòng)態(tài)誘騙實(shí)驗(yàn)場(chǎng)景Fig.11 Dynamic experimental scenario of UAV spoofing
值得注意的是,無(wú)人機(jī)導(dǎo)航飛控系統(tǒng)融合了衛(wèi)星導(dǎo)航、慣性導(dǎo)航、視覺(jué)導(dǎo)航、氣壓計(jì)等多源傳感器信息,無(wú)人機(jī)衛(wèi)星導(dǎo)航接收機(jī)受到干擾源欺騙信號(hào)影響后,無(wú)人機(jī)仍然可以獲取其余傳感器信息,因此若要進(jìn)一步控制無(wú)人機(jī)飛行軌跡,還需結(jié)合無(wú)人機(jī)導(dǎo)航飛控系統(tǒng)控制策略,這將是下一步研究工作的難點(diǎn)所在。
3 結(jié) 論
1)設(shè)計(jì)實(shí)現(xiàn)了一種小型化的同步生成式GPS欺騙干擾源,建立了同步式GPS欺騙干擾信號(hào)模型,給出了信號(hào)仿真參數(shù)的計(jì)算方法,采用時(shí)基同步的方法補(bǔ)償了干擾源的處理時(shí)延,通過(guò)商用接收機(jī)驗(yàn)證了GPS欺騙干擾信號(hào)模型及同步設(shè)計(jì)的正確性。
2)給出了干擾信號(hào)俘獲目標(biāo)接收機(jī)跟蹤環(huán)路過(guò)程中欺騙信號(hào)參數(shù)的調(diào)整方法,并通過(guò)商用接收機(jī)和無(wú)人機(jī)進(jìn)行了靜態(tài)和動(dòng)態(tài)實(shí)驗(yàn)驗(yàn)證,結(jié)果表明該方法能夠使干擾源在不需要壓制干擾阻斷目標(biāo)接收機(jī)跟蹤環(huán)路的情況下成功俘獲跟蹤環(huán)路的主導(dǎo)權(quán),最終使目標(biāo)接收機(jī)輸出預(yù)設(shè)的定位測(cè)速結(jié)果,驗(yàn)證了該方法的可行性。
為了提高誘騙成功率,并能夠誘騙無(wú)人機(jī)在防護(hù)區(qū)范圍內(nèi)飛往預(yù)設(shè)的誘騙位置,需要在本文工作基礎(chǔ)上針對(duì)初始載波相位誤差而優(yōu)化誘騙策略,并進(jìn)一步分析無(wú)人機(jī)導(dǎo)航飛控系統(tǒng),結(jié)合其飛控策略和測(cè)控鏈路設(shè)定合理的誘騙策略,并通過(guò)動(dòng)態(tài)飛行實(shí)驗(yàn)驗(yàn)證其效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06