三維聲吶系統在水工建筑物水下結構檢測中的應用
2020-06-04 01:08:50郭樹華
陜西水利 2020年4期
郭樹華,張 震
(上海勘測設計研究院有限公司,上海 200434)
1 概述
目前,國家對于水工建筑物的維修與加固投資逐漸加大,如何對水工建筑物維修加固、改建或重建提出科學合理的決策,這就需要對水工結構進行安全檢測并評價其安全類別。其中,最重要的是做好水工結構的安全檢測工作,檢測結果不但是評價水閘的重要依據,也是復核計算的基礎。
常規的水閘工程安全檢測工作,主要分為水上、水下檢測兩部分。其中,水上結構包括中控室、交通橋、圓弧翼墻、護岸擋墻等部分,可以通過直觀的檢測手段如目視、攝像等,也可以用全站儀測量,取芯室內抗壓試驗等方法檢測水閘現有狀況。對于隱患情況的探查,如滲水、塌陷等情況,可以通過綜合物探的方法(高密度電法、地質雷達法等)解決。
水閘工程水下結構指常水位時位于水面以下的結構,如水閘閘室、消力池、護坦、防沖槽等。主要問題有混凝土結構表面破損、裂縫,鋼筋裸露銹蝕、止水分縫破損、滲水,底板混凝土沖刷或者閘室及航道內淤積等情況。長期以來,水利工程的水下探測工作主要憑借潛水員的水下作業技能、經驗進行判斷,較多依賴于水質清晰度及雙手觸覺,通過探摸辨識水下結構異常情況,并通過實時對話進行描述記錄[1]。近年來,有較多的先進光學、聲學探測設備投入到水下檢測中來,如水下高清攝像機、水下激光成像、水下多波束測深系統、側掃聲吶等,但這些設備都存在一定的使用限制條件。
2 水下結構檢測難點
(1)采用人工水下探摸時經常會遇到作業條件受限,如水流過急或水下能見度較低;作業時間受限,潛水作業不能滿足長時間大面積檢查工作任務;作業深度受限,適合人工探摸作業有一定潛水深度要求,如水庫、大壩蓄水較深時人工難以完成任務;另外,潛水員對于水下結構的熟悉程度及專業知識儲備有限,探摸會受主觀因素影響,描述缺乏可靠性。
(2)采用光學、聲學設備時,針對水下滲漏、銹蝕、裂縫、沖坑與淤積等問題,只能做到“定性不能定量,定點不能定面”。如水下攝像,雖然操作方便簡單,但是檢測結果依賴于相機成像效果,并且極大地受制于水質情況。如水下激光成像方法,因為激光在水中會發生散射能量損耗較大,所以成像范圍較小,只能定點檢查,不能大面積的檢查。多波束的聲信號傳播到垂直面時,小部分原路反射被換能器接收,大部分會由于垂直面的不平整導致反射到底面,然后部分聲信號經過二次反射,再被接收換能器捕捉,這樣會在垂直面出現聲信號空白區域,無法判斷是否由于沖刷淘蝕等原因造成。側掃聲吶只能獲得二維地貌聲圖,難以量化沖刷缺陷、淘蝕等尺寸[2]。
本次采用三維聲吶技術,操作便捷,安裝方便,可以通過處理軟件實時顯示水下結構的三維圖像。
3 三維聲吶系統介紹及其特點
三維聲納可進行水下全景聲吶掃描成像檢查,利用聲吶穿透表面附著物,生成高分辨率的3D全景圖像。基本工作原理是三維成像聲吶系統向目標區域發射聲信號,利用聲成像方法對接收到的回波信號進行處理,獲得一系列二維圖像,直接采集到目標外形輪廓的水平(X)、垂直(Y)、高度(Z)三個方向上的數據,同時獲得目標物材質等更多細節描述。一次成像過程可同時獲得振幅圖像和距離圖像,通過自動計算將這兩類聲吶圖像進行處理合成,最終形成目標體的三維影像[3](見圖1)。
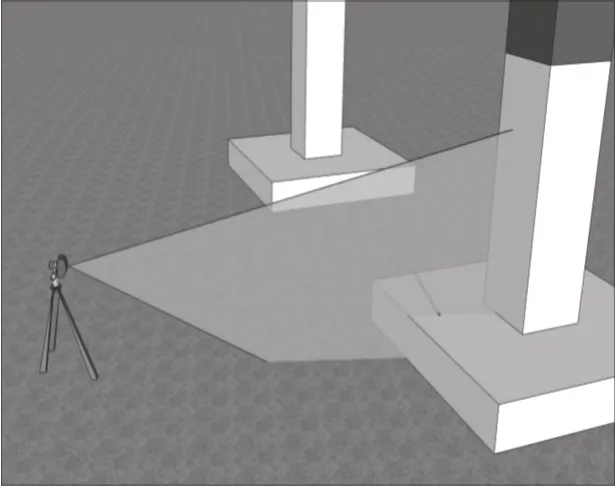
圖1 三維聲吶檢測原理示意圖
BV 5000 水下三維聲吶系統是一款緊湊輕便的聲吶系統,工作頻率為1.35 MHz,掃描范圍為1 m~30 m,可在低能見度或者零能見度水下環境中開展作業,利用高分辨率聲波技術形成精細的水下三維圖像點云數據,點云圖精度最小可達1.2 cm(軟件技術手冊)。特別適用于復雜水下結構、三維場景的區域勘測和堤壩、管道等檢查。
BV 5000 水下三維聲吶系統儀器設備見圖2,設備主要技術參數見表1。
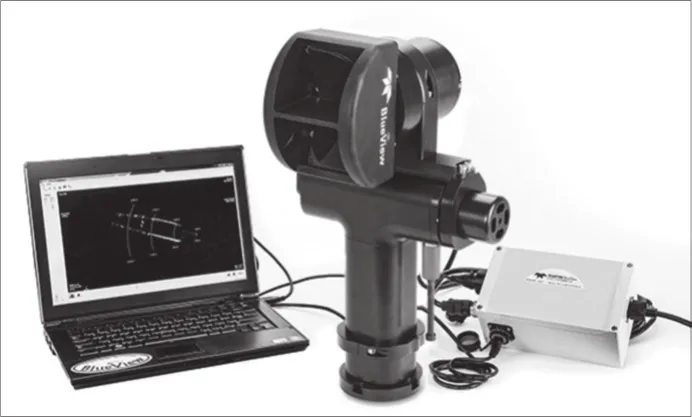
圖2 BV5000三維聲吶系統
對BV 5000 水下三維聲吶數據進行處理時,可以通過軟件設定同一站位上采集到的所有點云數據自動合并,以增加三維點云數據的精度;對于相鄰站位間的三維點云數據,則可通過兩次檢測數據間共有特征物點云數據進行匹配,從而實現不同站位間三維點云數據的合并。
利用專業點云數據后處理軟件,不僅可以進行點云數據的清錯點、刪噪點等測站檢測數據后處理工作,還可實現不同測站間檢測成果數據的拼接融合;并對最終成果點云數據進行瀏覽、判讀,精確量測異常情況的位置和發育情況。
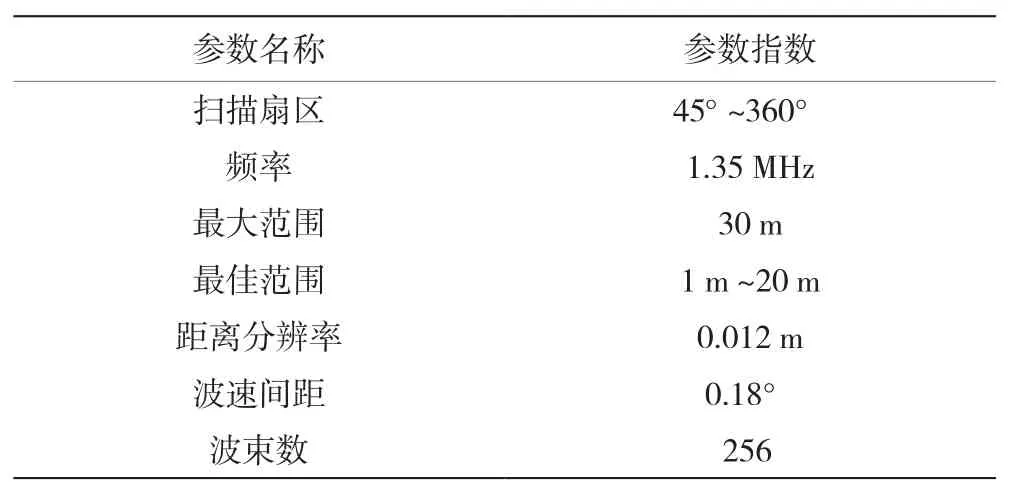
表1 BV5000主要技術指標
4 工程應用
本次鑒定的水閘為單孔閘,閘門孔口凈寬4 m,工程為Ⅰ等工程,水閘主要建筑物為1 級建筑物,其它永久性建筑物為3 級建筑物,臨時建筑物級別為4 級,其主要功能是防洪擋潮、引水、排澇等。
水閘工程范圍順水流方向長118 m,主要有內外河防沖槽、內外河海漫、內外河消力池和閘室等組成,閘室采用鋼筋混凝土塢式結構,水閘引水流量40 m3/s,排澇流量35 m3/s,內外河消力池均采用鋼筋混凝土U型結構,內外河海漫段、防沖槽段采用漿砌塊石護面,兩岸為斜坡,坡度為1∶2。
使用三維聲吶系統作業可以采用兩種方式,一種是固定測站式,一種是移動測站式,移動式需要水下機器人攜帶設備沿設定航線行進,通過機器人的定位信息將采集數據拼接,從而形成三維圖像,但是移動測站式對于水下定位信息要求較高,且操作水下機器人較為復雜。本次檢測采用固定測站式,共布設有效測站4 站(見圖3)。作業時BV 5000 水下三維聲吶系統由定制支架底座支撐,通過人工岸邊吊放完成檢測作業。BV 5000 三維聲吶系統采用水底定點掃描檢測作業,通過多站位檢測數據組合拼接,最終實現對水閘工程水下結構的全覆蓋檢測。
經外業測站檢測數據后處理和站間后處理數據拼接融合,獲得水閘內側聲吶檢測成果數據,并生成檢測成果點云數據模型,見圖4~圖6。

圖3 測站布置示意圖

圖4 水閘內側點云數據概略圖

圖5 水閘內側點云數據平視圖

圖6 水閘內側點云數據俯視圖
經點云數據模型瀏覽研判,水閘內側水下聲吶檢測數據質量及站間檢測數據拼接融合狀態良好,最終檢測成果點云模型完整、良好。水閘內側各水下結構完整,閘室底板、導流明渠立墻未見明顯破損,消力池結構完整,檢修閘門門槽狀態完好,閘室底部各處未見明顯淤積,水下結構整體狀態良好。對于細部結構如岸坡臺階、閘室兩側門槽及閘門結構等,均能清晰可見(見圖7、圖8)。
通過三維聲吶技術檢測到水下結構的情況,根據以上信息進行水閘穩定安全復核、翼墻結構安全復核、堤防整體穩定安全復核、消能防沖能力復核計算等,最終確定水閘評定等級,為水閘下一步運行維護提供依據。
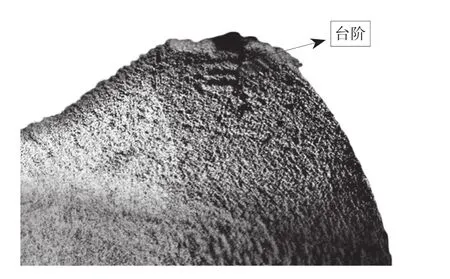
圖7 水閘內側河道岸坡臺階點云數據
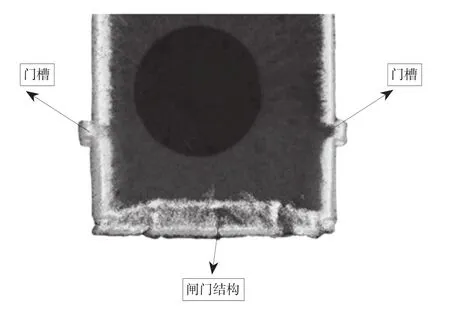
圖8 水閘內側檢修閘門門槽及閘門結構點云數據
5 結論與展望
(1)三維聲吶系統固定測站式作業時,應提前了解現場情況,通過比較三維聲吶系統最優掃描范圍及目的檢測范圍,確定測站位置及點數,有利于數字成果優化。
(2)可以將三維聲吶系統與多波束及側掃聲吶掃測相結合,既可以彌補多波束和側掃聲吶部分區域數據缺失的問題,又能實現渾濁水體下水下結構細部情況探查。
(3)三維聲吶檢測成果滿足水工建筑物水下結構檢測要求,可以進一步推廣并建立統一的技術標準。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
現代企業(2015年9期)2015-02-28 18:56:50
