面向HBT干涉定位的直線式傳感陣列結構優化
2020-06-13 11:48:20劉夢然李善強
科學技術與工程 2020年13期
劉夢然,李善強,賈 雯,聶 磊
(湖北工業大學湖北省現代制造質量工程重點實驗室,武漢 430068)
聲學定位技術是聲學、電學、信號處理等多門交叉學科的集成應用,廣泛應用于軍事、生活、工業檢測等領域。目前,聲學定位技術主要通過聲傳感器來獲取聲源信號,對采集的聲源信號進行處理,從而確定聲源的位置。聲學定位的方法可以歸納為以下三類:基于到達時差法[1]、可控波束形成定位法[2-3]、基于聲壓幅度比定位法[4]。相比后面兩類定位方法, 基于到達時差法的定位技術具有結構簡單、計算量小等優點,應用較為廣泛[5]。特別對于到達時差法,可基于光場HBT(Hanbury Brown and Twiss)干涉原理進行聲場干涉目標定位,這種方法考察了信號之間的相關性,可排除無內稟相干性的干擾信號,因此能夠實現在低信噪比情況下低頻信號的遠距離準確定位[6]。
經典的聲傳感器定位陣列拓撲結構有直線陣、十字陣、圓形陣和L型陣等結構。從幾何上看,這些經典拓撲結構都可以看作直線陣列的延伸,而且直線陣具有加工簡單、收放便利的優點,非常適合于各種載具的實際應用,因此直線陣列拓撲結構的研究具有非常重要的意義。現今眾多學者針對定位傳感陣列冗余問題開展了陣列優化研究[7-13]。
基于聲場HBT干涉定位方法,設計了一種優化算法,以對聲源的定位誤差范圍在1%以內為目標,對八元直線傳感陣列進行了拓撲仿真優化;通過實驗檢測,篩選出了滿足實際應用的直線陣列。
1 聲場HBT干涉定位原理
聲場HBT干涉理論來源于光場HBT干涉[14-15],光的HBT干涉現象是由Hanbury Brown和Twiss在1956年提出的,測量恒星角直徑的光強干涉儀即基于該原理設計而來。
實驗室可見光波段的HBT實驗原理圖如圖1所示。
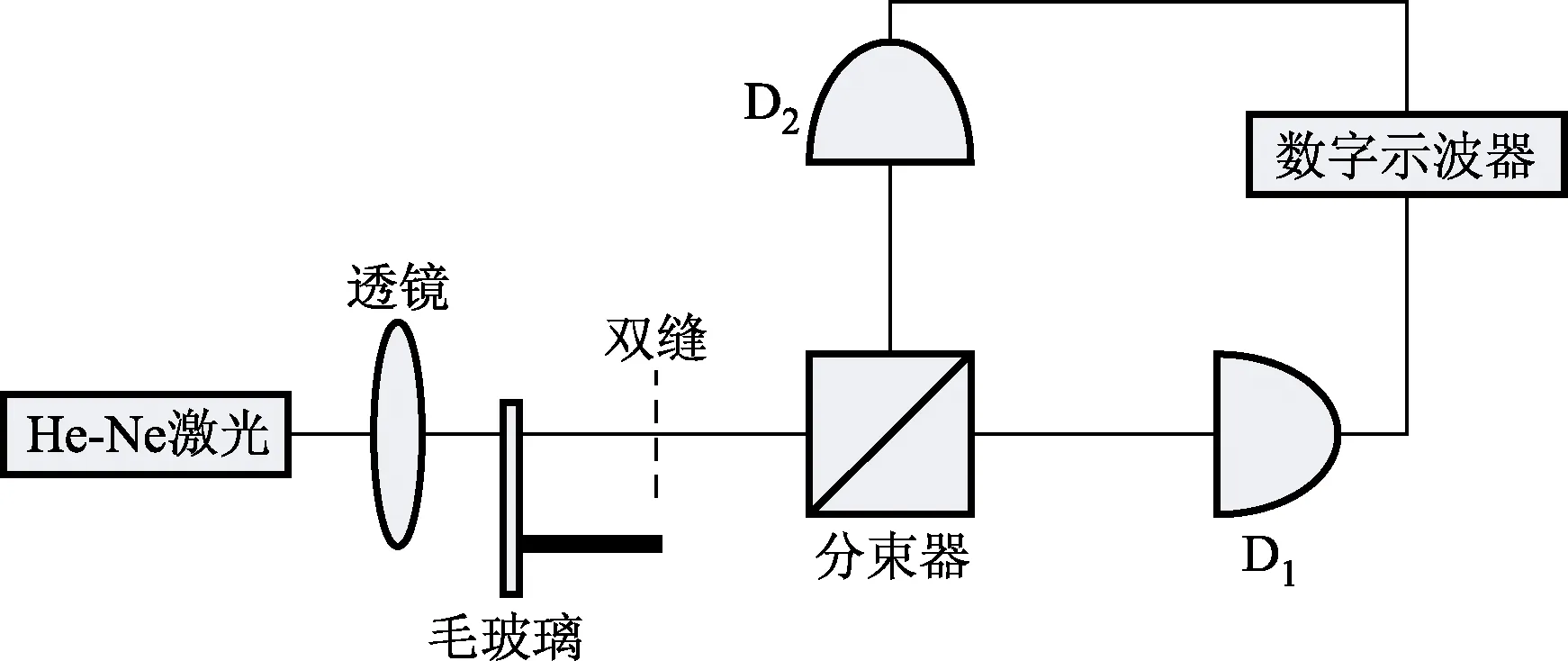
圖1 可見光波段HBT實驗原理圖
He-Ne激光器發出激光經過旋轉的毛玻璃,使其激光等效于一個空間波矢方向隨機分布的熱光源。通過一個雙縫的光用一個50:50的分光鏡分成垂直的兩束光,用兩個光電探測器采集光信號并進行強度測量。如若將D1探測器固定,然后對D2探測器進行橫向掃描,從而通過數字示波器得到兩個探測器光強值的強度歸一化相關函數。
假設空間內以一個聲源S作為坐標原點,同平面坐標系內存在聲學傳感器A和B,分別位于距離聲源S半徑為r1和r2處,傳感器A和B接收聲源發出的聲波,接收信號分別為Q1(r1,t1)以及Q2(r2,t2),如圖2所示。
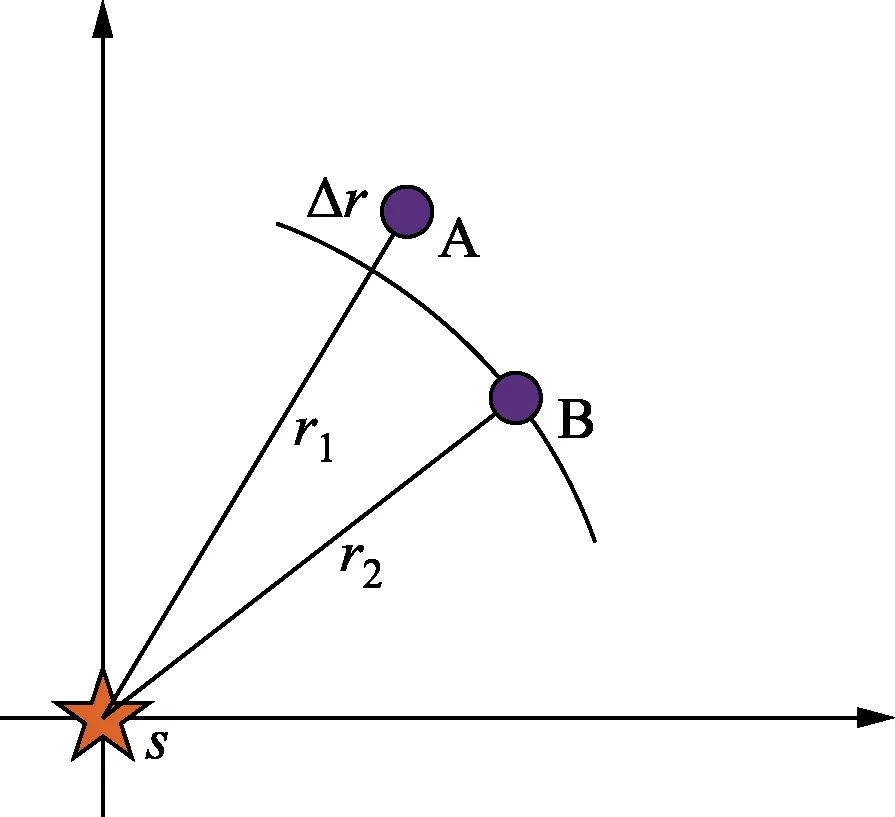
圖2 聲場HBT干涉實驗示意圖
根據光場中可見光波段實驗的相干光計算,將光學二階相關函數的計算方法引入到聲學定位,可以得到任意兩個傳感器之間的相關函數G:
(1)
(2)
對8個傳感器從左至右進行1~8排序,則八元傳感陣列的相關函數為
G=G12G13G14…Gij…G78
(3)
式(3)中:Gij表示第i個傳感器與第j個傳感器的相關函數。
根據光場干涉特性,當頻率、相位相同時,兩束光發生干涉,即出現明暗相間的條紋變化情況,且零級條紋光強最大。同理,同一個聲源發出一列聲波信號,傳感器A與傳感器B接收信號的相對時間差為0時,信號的相干性最強,即兩個傳感器相關函數最大。因此,可以得出,使式(3)中G達到最大的坐標點位置,即為聲源位置。
2 陣列結構優化方法與仿真分析
建立直角坐標系,8個傳感器分別等距離放置在X軸上,組成直線陣列,如圖3所示。假設聲源位置放置(5 m,20 m),運用MATLAB軟件,通過直線陣列進行聲源定位仿真模擬,通過掃描得到該掃描區域內所有相關函數,其中相關函數值最大的點即為聲源坐標,如圖4所示的八元陣列聲源定位效果圖,定位結果為(5 m,20 m),與所設置聲源坐標一致。
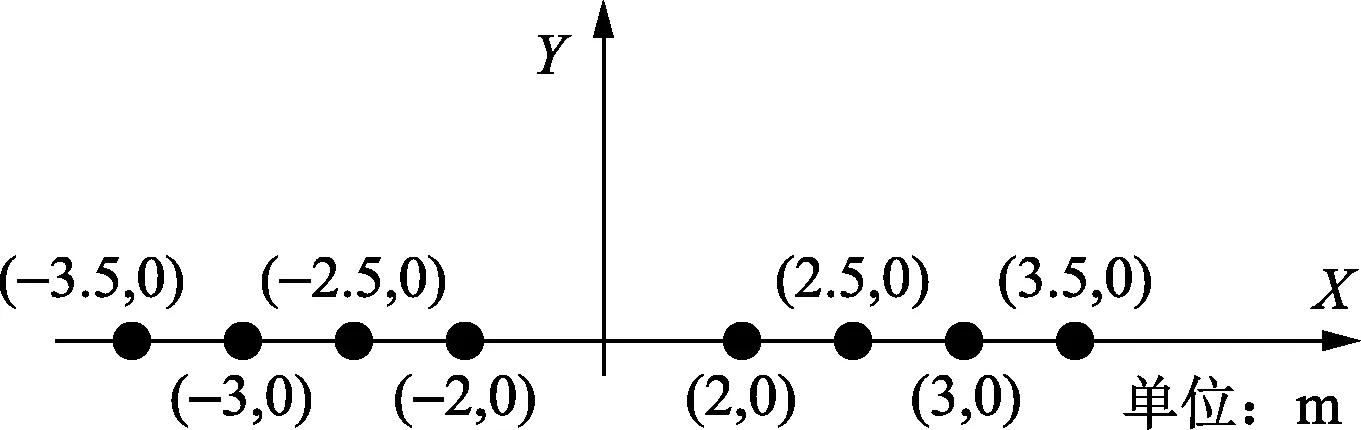
圖3 八元直線傳感陣列
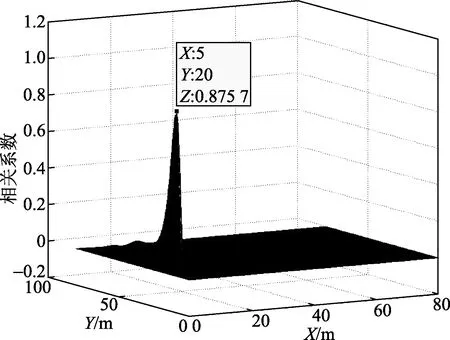
圖4 八元陣列仿真定位結果圖
根據本文所提出的以下優化算法對八元傳感直線陣列進行優化,具體優化步驟如下:
(1)確立參數集。首先,采用二進制規則對陣元的存在狀態進行編碼,存在傳感器為1,不存在傳感器為0,例如10101000表示一、三、五這3個位置放置傳感器。其次,根據聲場HBT干涉定位原理,其至少需要3個傳感器才能實現對聲源的定位,則以傳感器個數的不同在參數,建立傳感器個數為3~7的5個優化陣列參數集。例如傳感器存在個數為3的陣列如11100000、11010000、11001000等,放入第一個參數集。
(2)輸出模型的確定。根據聲場HBT干涉理論,以式(3)為目標輸出模型,并計算其定位誤差。
(3)停止條件確立。以傳感器存在個數為3的參數集開始,依次對5個參數集進行仿真,得到每個陣列對應所定位出來的聲源坐標。以陣列的定位誤差在1%以內作為傳統終止條件,當停止條件出現時,還需完成該參數集內剩下陣列的定位仿真。
(4)選出最優陣列。在滿足陣列的定位誤差在1%以內的參數集中進行篩選,選擇出最優陣列。
(5)對最優陣列進行下一步驗證,繪制出坐標與相關函數的仿真圖像,觀測其特征參數。
上述優化基本思想的具體流程如圖5所示。
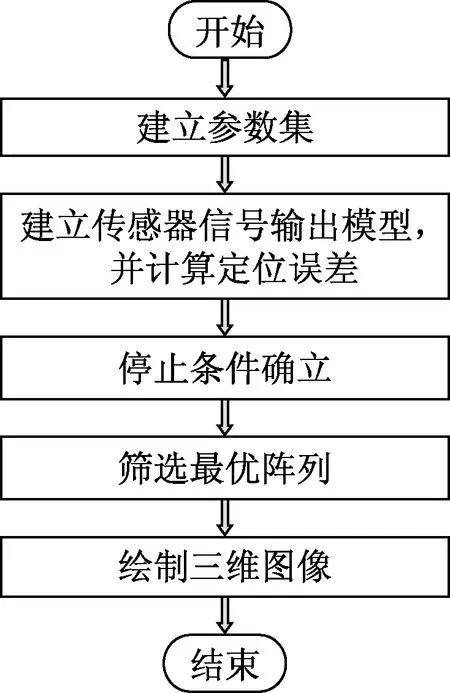
圖5 陣列結構優化流程
根據陣列結構優化仿真,得到5種最優陣列分別為01100110、10100101、10101010、11000011、11001100,定位誤差均為0.97%。其每種優化陣列對聲源定位的三維仿真圖如圖6所示。
由以上仿真結果可以看出,優化后的5種四元傳感陣列均可在減少傳感器個數的前提下,滿足定位誤差在1%以內的定位效果。
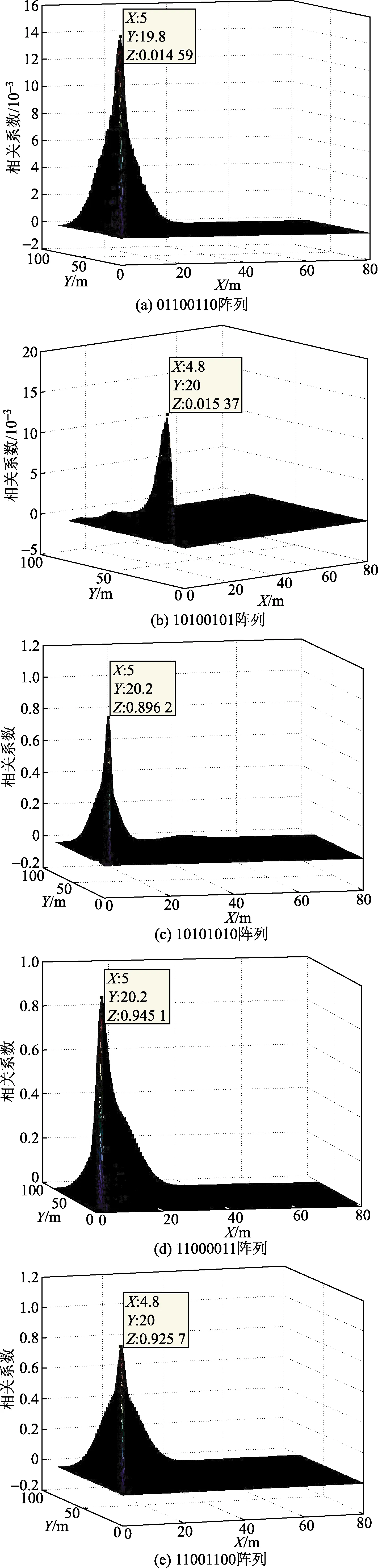
圖6 最優陣列仿真定位三維圖
3 陣列優化的測試實驗及分析
對以上聲源定位仿真得到的優化陣列進行實驗驗證,在實際測試中,八元直線陣列的聲傳感器以及聲源擺放位置如圖7所示,其中聲源真實坐標為(5 m,20 m),采用八元直線陣列傳感器所實現的定位效果如圖8所示。從圖8中可以得到定位的聲源位置在(5 m,20.2 m),其定位誤差為0.97%。

圖7 聲源定位實驗圖
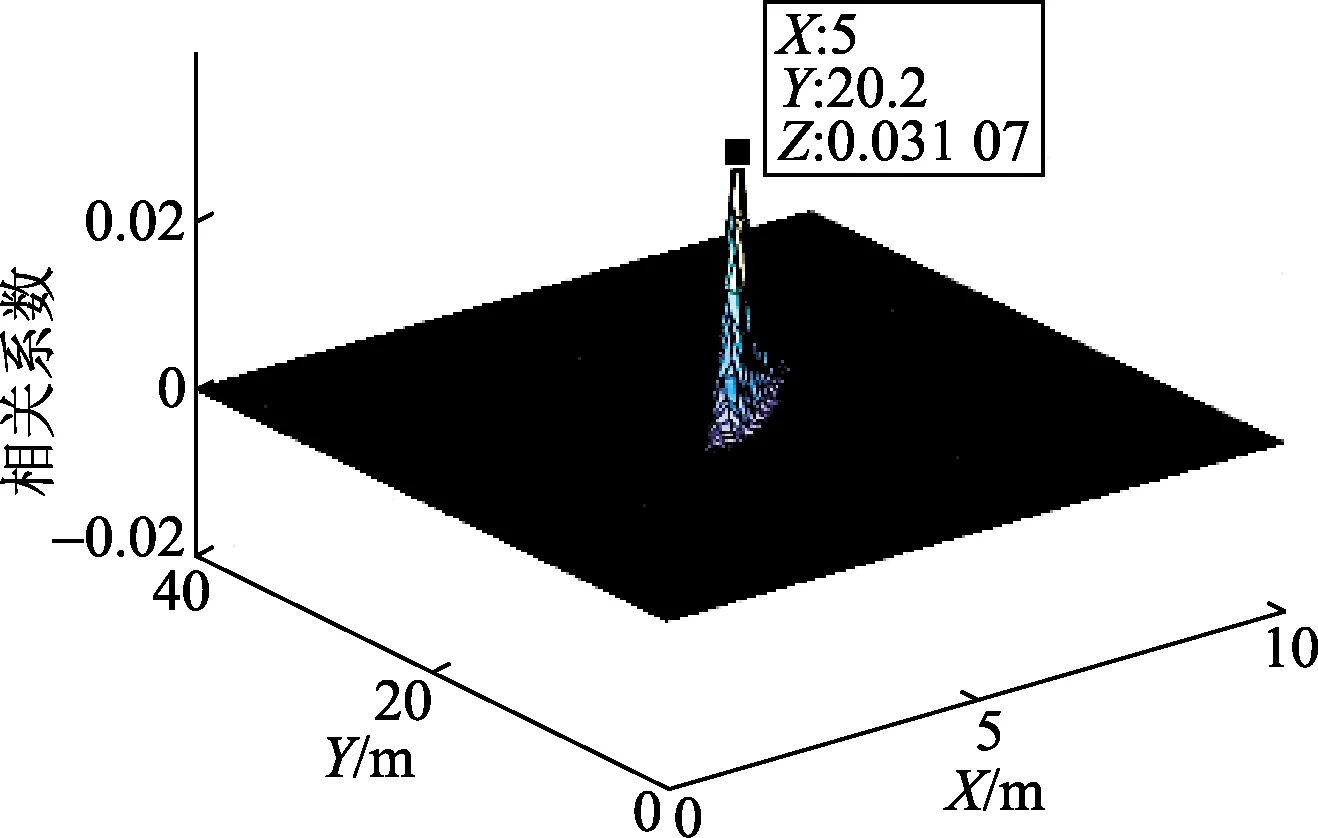
圖8 八元直線陣列定位實驗結果
在相同實驗環境下,重復進行上述實驗,然后分別提取陣列01100110、10100101、10101010、11000011、11001100相對應傳感器的輸出數據,得到聲源定位結果如表1所示。選取定位實驗結果與計算均值相一致的數據,繪制陣列聲源定位圖如圖9所示。
通過仿真與試驗的研究可以得到以下結果。
(1)定位實驗中只有01100110與10101010這兩種四元陣列定位誤差小于1%,其結構示意圖如圖10所示。
(2)由于仿真的時候噪聲設置為白噪聲,并不能完全模擬真實噪聲,因此,在實驗的仿真得到5個四元拓撲結構,但經過實驗檢驗后只有2個滿足要求。
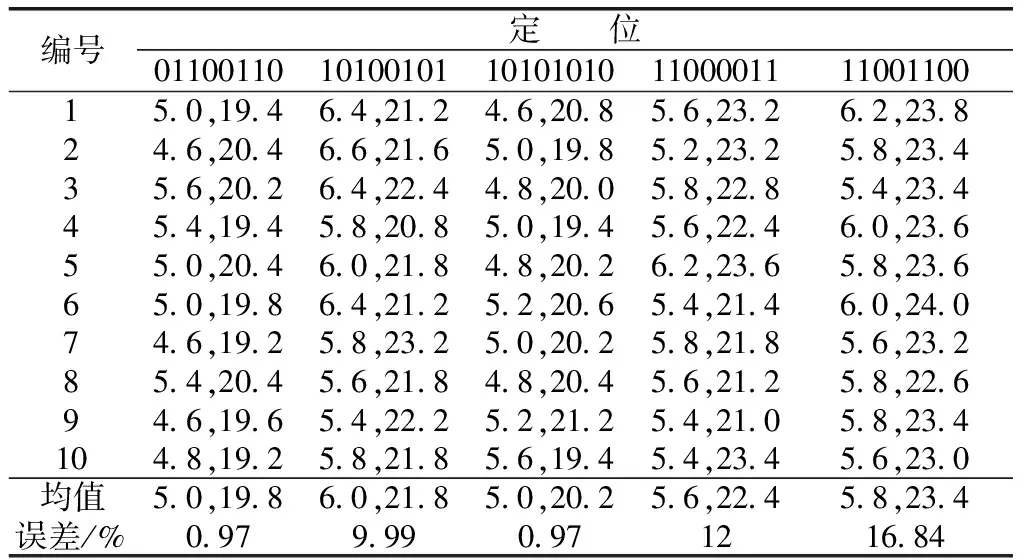
表1 實驗結果
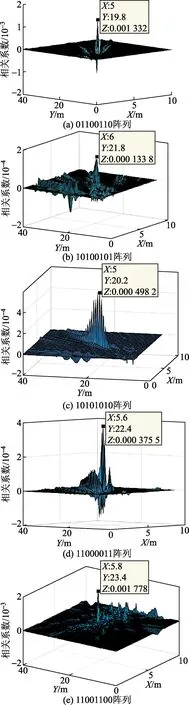
圖9 最優陣列實驗定位結果
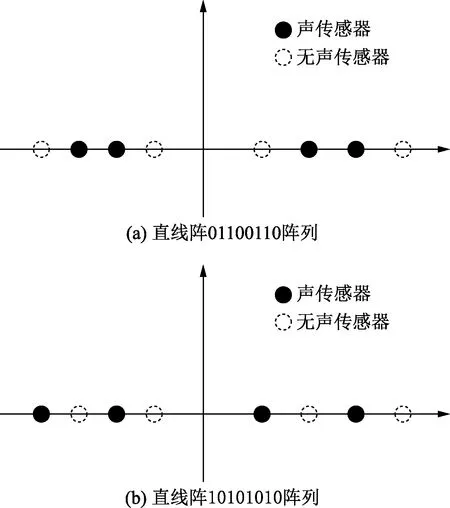
圖10 最優陣列結構示意圖
(3)掃描步長為0.2 m,所以誤差皆為0.2的倍數,可以通過減小掃描步長來進一步提高定位精度。
(4)下一步將進行定位誤差分析,尋找影響定位的各個誤差源,分析誤差服從的分布規律,得出定位的測量不確定度。
4 結論
為消除聲源定位直線陣列中的冗余陣元,精簡陣列結構而不影響定位精度,開展了基于HBT干涉定位的直線陣列優化研究。基于HBT干涉定位原理建立仿真定位模型,對陣列進行編碼優化仿真,得到聲學定位性能最優的5個直線傳感陣列。并通過定位實驗對所得四元優化陣列進行驗證,結果表明有2個四元直線陣列的定位結果在設定誤差范圍內,基本達到與八元直線陣列一致的定位性能。研究結果將有效減小定位系統體積、優化陣列結構和提高定位效率。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
發明與創新(2016年38期)2016-08-22 03:02:52