基于Kalman濾波的高頻CW電報信號自動識別
2020-06-16 01:02:30李國軍喬金亮周曉娜葉昌榮
海軍航空大學學報 2020年1期
李國軍,喬金亮,周曉娜,葉昌榮
(1.重慶郵電大學超視距可信信息傳輸研究所,重慶400065;2.重慶理工大學計算機科學與工程學院,重慶400054)
高 頻CW 通 信 是 在3~30 MHz 頻 段 內(波 長10~100 m)的一種無線電通信方式,所需設備簡單、占用頻帶窄、功放效率高,能在低信噪比的環境下工作,是目前戰術通信的重要手段。同時,在航海、航空等靈活性通信以及抗干擾要求較高的民用方面也有廣泛的應用[1-3]。高頻CW自動接收分為信號自動檢測技術與點劃識別技術2個步驟。CW信號自動檢測的目的是從噪聲背景下檢測提取出純凈的CW信號時域波形,抑制背景噪聲和信道噪聲對CW信號的影響;而點劃識別則是從檢測提取出的純凈CW信號時間序列中識別出莫爾斯碼的點劃序列,再根據莫爾斯碼的譯碼規則譯為相應的字符(英文字母、數字或標點符號)。
長期以來,CW電報通信都是靠人工操作完成的,但是短波高頻電離層信道存在嚴重的衰落現象和多徑效應。考慮戰時通信電磁環境十分惡劣,在強噪聲干擾和碼速率較高的情況下,人耳很難辨別發報信息的內容,隨著現代通信技術的快速發展,人工CW通信速度顯得較為緩慢,而且誤碼率較高,從而造成通信性能下降。
國內外對CW電報信號自動檢測譯碼的研究有很多,但是目前還沒有得出能夠在強噪聲背景下同步檢測提取出純凈高頻CW 信號的一致算法。文獻[4]中使用包絡檢波算法,但當碼速率較高或處于強噪聲干擾時難以實時跟蹤信號波形的變化,出現誤碼率高,性能嚴重下降的情況。文獻[5]采用復數譜方差識別高頻CW 信號,算法雖然簡單,但抗單音信號及鄰頻CW 信號干擾性能差,而且沒有考慮噪聲特性的時變問題,難以在實際工程中應用。文獻[6]提出了一種基于ARMA信息模型的CW信號自適應Kalman濾波方法,但是在濾波開始階段存在較大的抖動,且判決電平使用脈沖峰值的均值,自適應能力和實時性差。文獻[7]提出一種基于非線性雙穩隨機共振的微弱CW信號檢測方法,算法復雜,自適應性和實時性差,且檢測結果依賴于算法的精度。文獻[8-9]采用人工智能和機器學習的方式對莫爾斯碼進行檢測識別,但該算法復雜,需要大數據樣本對其進行訓練。
以上文獻中的檢測算法是在沒有信號同步的基礎上直接對CW 信號進行處理,識別算法中基本都是使用硬判決的方法。短波電離層反射信道隨機多徑現象嚴重,不僅引起信號幅度的衰落,而且引起干涉效應,使信號產生失真和多徑時延。因此,CW電報接收端的同步性能對通信系統至關重要。以上算法不能應對未知噪聲強度時變的問題,造成CW 信號檢測識別[10]的誤碼率較高,通信性能不佳。所以,CW電報的自動檢測和識別仍是當前戰術通信發展的重點。
本文提出一種基于卡爾曼最優估計特性,對CW電報信號進行自動識別的算法。利用自同步法對CW電報信號進行時域同步定位分段,通過Goertzel 算法得到信號在CW 特征頻率點的能量,進而通過卡爾曼濾波設置自適應能量閾值,對CW 信號的能量值進行判決識別,實現強噪聲背景下CW 信號的同步檢測和自適應識別,同時保證算法的遞推性和實時性。
1 CW信號
將無線短波電臺接收機調諧到CW信號載波頻率上進行電報接收,由于實際高頻電離層信道存在多徑效應引起的多徑衰落,以及信道中各種噪聲的影響,所以將高頻CW 信號模擬為一個頻率已知、幅度和相位未知的正弦信號。

CW信號頻率f0通常設置在300~3 400 Hz 頻率范圍內,CW通信的報文信息主要就是莫爾斯電碼,莫爾斯電碼(又譯摩斯密碼,Morse code)是一種時通時斷的信號代碼,由2 種基本信號(點‘dot’和劃‘dash’)和不同的間隔時間組成,通過不同的排列順序來表達不同的英文字母、數字和標點符號。它以其精簡度高、成本低、效率高的優勢,在通訊科技日益發達的今天,仍然占有相當重要的地位。點‘dot’脈沖持續時間Ts與通信碼速率(CPM)有關,有2 個常見的典型標準:“PARIS”制和“CODEX”制。PARIS 模仿自然語言單詞的典型單詞率,并利于表示莫爾斯電碼代碼對于常見字符(如“e”和“t”)的較短代碼持續時間。CODEX提供典型的5 字符代碼組(隨機字母序列)的單詞速率。使用PARIS 制作為標準,點單位數為50,計算表明每分鐘20 個單詞的點長度為60 ms。使用60 點單位的CODEX 制,每分鐘20 個單詞的點長度為50 ms。本文以“CODEX”為標準進行通信,由此得到的Ts(s)=5/CPM,在100 CPM 速度下,Ts時間長度為50 ms。圖1中取CW信號特征頻率f0為1 000 Hz,采樣頻率fs為8 000 Hz,按照莫爾斯碼規則構造信息為“CQ SOS”的CW電報信號。

圖1“CQ SOS”的CW電報信號形式Fig.1 CW signal form of“CQ SOS”
2 CW電報信號自動識別
CW電報信號識別就是從噪聲、干擾與畸變、時延中提取純凈信號,獲取發送信息的過程。本算法首先利用自同步法對CW電報信號進行同步檢測[11-12],實現位同步,利用Goertzel算法得到分段信號的能值,通過建立卡爾曼濾波狀態空間模型動態最優估計能量閾值進行軟判決,最終實現CW電報的自動識別,如圖2所示。

圖2 CW電報自動識別流程圖Fig.2 Flow chart of automatic recognition of CW
2.1 CW電報信號自同步
任何一個通信系統都是發送信號與接收信號的結合,接收信號的前提就是要實現系統的同步以得到碼元信號的起止時刻,獲取完整的碼元信息。同步性能的好壞直接影響通信系統的性能,出現同步誤差或失去同步會導致通信系統性能下降或通信中斷。短波寬帶接收機對高頻CW電報信號進行下變頻得到基帶信號,基帶信號內包含CW電報信號的同步信息,利用自同步法對信號實現位同步:對基帶CW 信號進行二次下變頻,根據點‘dot’脈沖持續時間Ts,得到同步正弦信號理論頻率,但是實際高頻電離層信道傳播中存在多普擴展和多普勒頻移的影響,設置適當的頻率范圍在基帶信號頻譜內進行尖峰探測,提取出同步正弦信號對CW 電報信號進行時域定位分段,如圖3 所示。
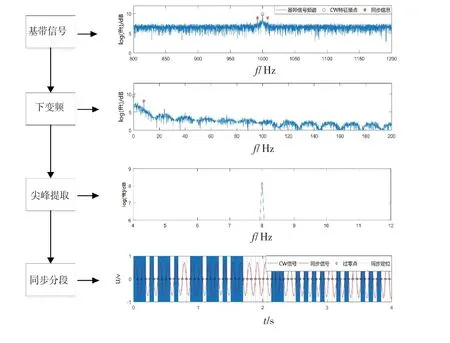
圖3 CW電報信號同步流程圖Fig.3 Flow chart of CW signal synchronization
Goertzel 算法[13-14]是在離散傅氏變換的基礎上進行改進的一種算法,序列x(n),n ∈[0,N-1]的離散傅里葉變換(DFT)為:

式中,WN=e-j2π/N。

所以,式(1)可寫為:

式(2)求和具有卷積的形式,因而可將X(k)視為序列x(n)激勵某一系統的輸出。
將此一階遞歸系統算法改進為一個二階系統遞歸算法,其轉移函數為:

式(3)二階系統可用以下差分方程表示:


Goertzel 算法[15-16]能得出與常規離散傅里葉變換(DFT)或FFT 相同的頻率實部和虛部,但是Goertzel算法能取得信號在特定頻點的頻譜幅值大小,不須要計算整個頻帶的頻譜值。同時,能夠在每次采樣后立即進行處理。相比FFT 對成塊的采樣進行處理的方式,采用Goertzel 算法更加有效,運算量小、實時性更強,本文利用Goertzel算法,計算分段信號在CW信號特征頻率點的能量值。
2.2 基于卡爾曼濾波進行自適應識別
通過Goertzel 算法得到的信號能量值有2 種:有效信號能量值與噪聲的能量值之和;CW 電報信號各種間隔(包括點‘dot’和劃‘dash’間隔、字符之間間隔、單詞之間間隔)內信道噪聲以及背景干擾噪聲的能量值。因此,須要設置一種閾值判決其是否為有效信號能量。由于高頻通信中電離層信道是隨參信道,固定的判斷閾值不能應對干擾噪聲強度時變問題,使得識別結果誤碼率增大。Kalman濾波[17-18]能夠從一系列完全包含噪聲的測量中,估計一個動態系統的最優狀態,尤其在強噪聲背景下跟蹤動態信號,在動態系統最優估計中具有很好的性能,且能對目標狀態能進行遞推迭代實現最優估計。但CW 信號的標準Kalman濾波要求已知系統噪聲的統計特性,錯誤的系統模型、測量模型或不準確的噪聲統計值會導致估計值產生發散現象。所以,本算法在規定報文信息以‘CQ’為報頭的基礎上進行同步檢測識別,以得到通信信道噪聲信號的統計特性。通過卡爾曼濾波技術設置自適應閾值對能量值X(k)進行判決識別,自適應閾值會動態的調整以應對干擾噪聲能量的時變。
卡爾曼濾波[19-20]采用信號與噪聲的狀態空間模型,利用前一時刻的估計值和現時刻的觀測值來更新狀態變量現時刻的估計值。

式(4)分別為Kalman 濾波狀態方程和測量方程,狀態值X(k)是通過Goterzel算法得到的CW信號每N個樣本在特征頻率點的能量值,定義觀測值:

通過設置長度為8 的滑動窗得到觀測值,是因為CW信號點劃最大間隔為7倍dot長度,保證在此滑動窗內有一個有效信號能量值。
設置狀態轉移矩陣Φ、觀測矩陣H 和噪聲驅動矩陣Γ 都為單位矩陣,狀態噪聲和觀測噪聲均為零均值高斯白噪聲過程,前后時刻的誤差互不相關,對應的統計特性方差Q、R 根據先驗報頭信息‘CQ’對應的CW 信號得到,利用更新傳遞方程式對能量閾值實時更新。

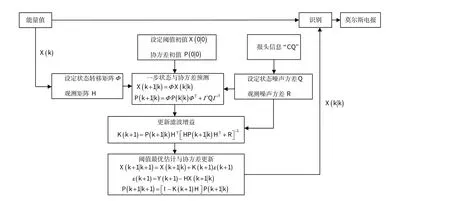
圖4 CW電報信號識別流程圖Fig.4 Flow chart of recognition of CW signal
3 實驗結果及分析
3.1 仿真結果及分析
Matlab仿真中,CW信號特征頻率f0為1 000 Hz,采樣頻率fs為8 000 Hz,通信碼速率CPM為80,采樣點數為90 541,時間長度為11.317 6 s。分別對純凈CW 信號添加信噪比為-20~0 dB 的高斯白噪聲。同時,模擬瑞利衰落信道,對CW信號進行同步檢測和識別。高斯白噪聲和瑞利衰落仿真信道對信號具有隨機性,所以在每個固定信噪比下進行100次檢測識別,記錄位同步相差和誤碼率以及同一信噪比下結果的方差。同時,利用短波信道pathsim 仿真軟件分別在CCIR-good、CCIR-moderate、CCIR-poor 3 種仿真信道下模擬通信環境,利用本算法對不同信噪比下的CW信號進行檢測識別,記錄誤碼率。
相位誤差是指同步信號的平均相位與最佳同步相位之間的偏差,是衡量位同步性能優劣的指標。如圖5所示,隨著噪聲信號強度的不斷增大,同步檢測的相差和誤碼率隨之逐漸增大。同時,同步性能的好壞也直接影響信號識別的誤碼率,位同步相差的增大導致識別誤碼率的提高。
3.2 實際CW電報信號的檢測識別
為了驗證此算法在實際短波通信中的性能,以重慶市重慶郵電大學與重慶市石柱縣為測試點,直線距離150 km ,時間為2018.3.28 09:55,通信頻率選擇5.47 MHz ,碼速率CPM 設為80。石柱縣使用WTB150 中高頻無線電單邊帶電臺配置倒‘V’天線進行CW 電報信號的發送,在重慶郵電大學使用WRG33DDC短波寬帶接收機配置倒‘V’天線將接收信號保存為‘wav’文件,利用本算法對CW 電報信號進行檢測識別,結果如圖6所示。
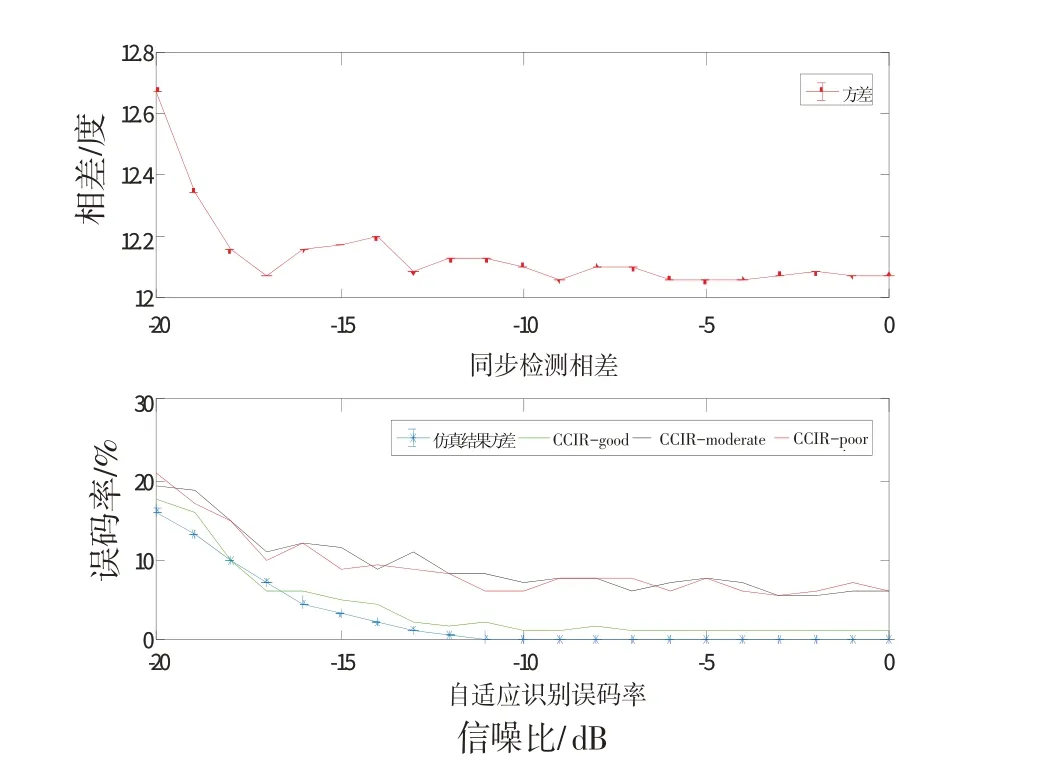
圖5 同步相差和誤碼率Fig.5 Synchronization phase difference and bit error rate

圖6 實際信號檢測結果Fig.6 Actual signal detection results
結果顯示,此算法能夠在實際短波通信中檢測識別出純凈的CW 電報信號,但是誤碼率比較高。究其原因,是由于本算法在仿真中使用的是高斯白噪聲,實際通信中噪聲是非平穩有色噪聲。下一步,對算法進行完善,以應對實際通信信道環境。
4 結束語
針對目前高頻CW電報信號檢測方法的抗噪聲性能不強、實時性差的問題,本文提出一種基于卡爾曼濾波的高頻CW電報信號自動識別算法。對報頭信號處理得到通信信道噪聲的統計特性,通過卡爾曼濾波迭代遞推最優自適應能量閾值,消除信道多徑效應和干擾噪聲對信號的影響,提取出純凈的CW 信號進行識別譯碼。實驗證明,在強高斯白噪聲干擾和實際短波通信環境下,該算法能夠有效識別出純凈CW信號,且算法可遞推實現,對高頻CW 信號的自動檢測識別具有一定的實用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39