表征防御性駕駛技術(shù)與情緒智力提升的多元線性回歸模型
2020-06-19 07:33:48祁曉峰
公路交通科技 2020年6期
祁曉峰
(江蘇汽車技師學(xué)院,江蘇 揚(yáng)州 225003)
0 引言
防御性駕駛是指在多因素耦合的交通環(huán)境或狀態(tài)下,尤其在預(yù)期交通參與者違法違規(guī)駕駛的情況下,駕駛?cè)四茴A(yù)先感知風(fēng)險(xiǎn),能正確地分析判斷,并能及時(shí)地做出調(diào)整或規(guī)避的方案,并準(zhǔn)確及時(shí)的實(shí)施的駕駛方法。駕駛?cè)饲榫w智力是駕駛?cè)饲榫w和駕駛智力的總稱,駕駛智力是指駕駛?cè)嗽谛熊囘^程中對車輛的控制能力、感知能力、判斷能力、記憶能力、注意能力等;駕駛?cè)饲榫w是指行車過程中駕駛?cè)说那楦屑捌浞€(wěn)定性。目前,國內(nèi)外對防御性駕駛技術(shù)和駕駛?cè)饲榫w智力的研究主要分防御性駕駛的可行性和必要性研究及行為識別判斷研究兩個(gè)方面。在可行性和必要性分析方面:Knipling R R等人[1]2003年,提出駕駛?cè)丝煽啃园?個(gè)方面的內(nèi)容:風(fēng)險(xiǎn)駕駛行為、高風(fēng)險(xiǎn)駕駛?cè)恕Ⅰ{駛?cè)说纳眢w意識、駕駛風(fēng)格、缺乏防御性駕駛技術(shù)、與裝卸有關(guān)的延遲、疲勞駕駛、攻擊性駕駛。Neto J P L等人[2]2011年,提出防御性駕駛是交通流控制的重要因素,若把握不好實(shí)施防御性駕駛的節(jié)點(diǎn),會造成交通流整體的延遲。Huang J L等人[3]2012年,利用112名駕駛?cè)?星期的數(shù)據(jù)宏觀分析了防御性駕駛培訓(xùn),對提升駕駛?cè)藘?nèi)部駕駛智力的影響,結(jié)果顯示防御性駕駛培訓(xùn)能提升駕駛?cè)说淖晕铱刂颇芰Γ唧w表現(xiàn)為速度控制或方向控制節(jié)點(diǎn)的優(yōu)化。Habibovic A等人[4]2013年,分析在步行街上發(fā)生事故和駕駛可靠性的關(guān)系,并通過對錄像分析顯示,視野盲區(qū)和分心駕駛是駕駛可靠性下降的主要因素。Mihai C等人[5]2014年,通過對羅馬尼亞運(yùn)輸企業(yè)外部環(huán)境和企業(yè)內(nèi)部運(yùn)營框架分析,得出對駕駛?cè)碎_展防御性駕駛培訓(xùn)使駕駛?cè)薑PI平均提升3%~5%,得出對駕駛?cè)碎_展防御性駕駛技術(shù)培訓(xùn)有助于降低企業(yè)成本,提高企業(yè)競爭力,并倡導(dǎo)對羅馬尼亞全部駕駛?cè)碎_展防御性駕駛培訓(xùn)。Bebinov S等人[6]2016年,將駕駛?cè)伺嘤?xùn)分為3個(gè)階段,第1階段是初始駕駛?cè)思寄芴嵘A段,此階段駕駛?cè)丝煽啃灾饕憩F(xiàn)為駕駛?cè)朔磻?yīng)的靈敏性等;第2階段是防御性駕駛培訓(xùn)階段,此階段駕駛?cè)丝煽啃员憩F(xiàn)為駕駛風(fēng)格和習(xí)慣,此階段駕駛風(fēng)格可以補(bǔ)償一部分由于駕駛心理和生理的不足造成的安全風(fēng)險(xiǎn);第3階段為駕駛動機(jī)主導(dǎo)階段,此階段駕駛?cè)藙訖C(jī)為駕駛可靠性的主導(dǎo)因素,不良的駕駛動機(jī)會削弱駕駛?cè)说目煽啃浴izeanu S等人[7]2017年,對60名18~65歲的駕駛?cè)诉M(jìn)行了防御性駕駛訓(xùn)練,發(fā)現(xiàn)防御性駕駛訓(xùn)練有助于提升駕駛?cè)说那榫w智力,并分析了開展防御性駕駛培訓(xùn)與駕駛?cè)四挲g的相關(guān)性。Charisma等人[8]2019年,通過分析得出防御性駕駛技術(shù)訓(xùn)練對BRT駕駛?cè)耸潜夭豢缮俚模热缱尦丝宛B(yǎng)成系安全帶的習(xí)慣和進(jìn)行每周的防御性駕駛討論。候培國等人[9]2019年,提出一種基于防御性駕駛的一維元胞自動機(jī)交通流模型,該模型對駕駛實(shí)時(shí)防御性駕駛的時(shí)間和速度進(jìn)行了規(guī)劃,并與敏感駕駛模型(SDNaSch)進(jìn)行了對比,結(jié)果顯示基于防御性駕駛的一維元胞自動機(jī)交通流模型交通資源利用率更高,更加符合實(shí)際情況。在判斷與識別方面:Brombacher P等人[10]2017年,提出一種基于神經(jīng)網(wǎng)絡(luò)的駕駛?cè)笋{駛風(fēng)格辨識模型,主要對駕駛?cè)瞬扇》烙择{駛行為進(jìn)行了辨識。并對模型進(jìn)行了數(shù)據(jù)驗(yàn)證,通過對未采取防御性駕駛或其他危險(xiǎn)駕駛行為的預(yù)警,減少事故發(fā)生的可能性。賀鵬麟等人[11]2018年,提出了一種駕駛?cè)藢?shí)施防御性駕駛技術(shù)的判別系統(tǒng)及車輛。對駕駛?cè)藢?shí)行防御性駕駛進(jìn)行識別,對駕駛?cè)说鸟{駛風(fēng)格進(jìn)行記錄。在提高駕駛?cè)说鸟{駛可靠性方面,Lai P Y等人[12]2018年,設(shè)置了一種儀器提醒駕駛?cè)碎_展防御性駕駛的節(jié)點(diǎn),并對危險(xiǎn)區(qū)域的風(fēng)險(xiǎn)進(jìn)行了評估,通過車載設(shè)備實(shí)時(shí)傳輸給駕駛?cè)恕?/p>
以上研究對提高駕駛可靠性、降低道路交通事故的發(fā)生率起到了很好的成效,但缺少了防御性駕駛培訓(xùn)對駕駛?cè)饲榫w智力提升定量關(guān)系的分析,因而缺少對培訓(xùn)成效的預(yù)測與評估等環(huán)節(jié),本研究針對此問題,分析駕駛?cè)饲榫w智力評價(jià)指標(biāo)和防御性駕駛技術(shù)流程,分析目前對駕駛?cè)碎_展防御性駕駛的主要關(guān)鍵節(jié)點(diǎn)。并基于對駕駛?cè)碎_展防御性駕駛的成效數(shù)據(jù),構(gòu)建一種基于多元線性回歸的表征防御性駕駛技術(shù)與情緒智力提升關(guān)系的模型,為開展相應(yīng)的預(yù)測與評估等打好基礎(chǔ)。
1 情緒智力評價(jià)指標(biāo)
Goleman[13]1995年提出,駕駛?cè)饲榫w智力的評價(jià)指標(biāo)為自我認(rèn)知(自我意識)、自我控制(渴望真理、責(zé)任心、適應(yīng)性創(chuàng)新)、動機(jī)、感動深受(理解別人、多樣化),社會技能(影響,交流,沖突管理,領(lǐng)導(dǎo),關(guān)系建立,合作,團(tuán)隊(duì)協(xié)作能力),同時(shí)還提出情緒智力大部分來自后天的培養(yǎng),良好的教育培訓(xùn)對提升情緒智力有明顯的作用。Sparrow等人[14]2006年提出,駕駛?cè)饲榫w智力從人際關(guān)系和自我認(rèn)知兩個(gè)方面描述,自我認(rèn)知表示自我管理能力,人際關(guān)系表示人際關(guān)系管理能力,Stein等人[15]2006年,提出自我認(rèn)知表示駕駛?cè)说睦斫夂团c其他人交流的能力,分為感同身受、社會責(zé)任、人際關(guān)系3個(gè)方面。任秀偉[16]2014年提出,駕駛?cè)饲榫w智力為駕駛?cè)说那榫w及智力,一是主觀上的駕駛情緒,與駕駛?cè)说男那椤⒏星榧捌浞€(wěn)定性有關(guān);二是客觀上的駕駛智力,包括駕駛?cè)藢Φ缆翻h(huán)境的感知力、記憶力、辨別力、判斷力和決策力等。基于以上研究成果,本研究建立駕駛?cè)饲榫w智力評價(jià)指標(biāo)見圖1。
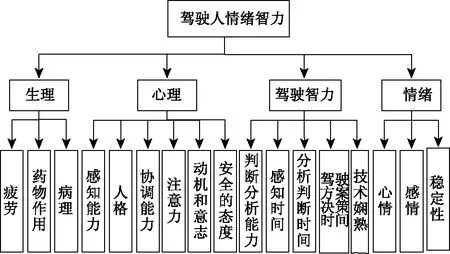
圖1 駕駛?cè)饲榫w智力評價(jià)指標(biāo)Fig.1 Evaluation indicators of driver’s emotional intelligence
2 防御性駕駛技術(shù)分析與培訓(xùn)體系設(shè)計(jì)
2.1 防御性駕駛技術(shù)分析
防御性駕駛技術(shù)是一種避免自身事故發(fā)生可能性的駕駛技術(shù),包括風(fēng)險(xiǎn)感知、分析判斷、做出決策、正確實(shí)施4個(gè)方面。余泰初[17]2019年,提出駕駛?cè)说娘L(fēng)險(xiǎn)感知是從時(shí)間和空間的角度獲取交通環(huán)境的各種要素,理解并預(yù)測其未來狀態(tài)的過程。并將駕駛?cè)孙L(fēng)險(xiǎn)感知總體上歸為駕駛?cè)藢煌ōh(huán)境中突變信息的感知。駕駛?cè)朔治雠袛嗍侵格{駛?cè)舜竽X思維對感知事物所做出的判斷與實(shí)際情況的對比。分析判斷與實(shí)際相符合則分析判斷正確,與實(shí)際不相符則分析判斷錯(cuò)誤。Steimetz S C等人[18]2007年,對防御性駕駛和安全風(fēng)險(xiǎn)、出行延遲之間的關(guān)系進(jìn)行了研究,提出防御性駕駛對出行時(shí)間的一種消耗,并針對如何平衡防御性駕駛和出行時(shí)間之間的關(guān)系提出了一種數(shù)學(xué)模型,實(shí)現(xiàn)基于出行延遲的事故發(fā)生預(yù)測。由以上研究可以看出,防御性駕駛是一門技術(shù),是駕駛?cè)硕喾侥芰Φ木C合體現(xiàn),基于以上研究,本研究形成了防御性駕駛技術(shù)的流程與能力需求見圖2。

圖2 防御性駕駛技術(shù)流程與能力需求Fig.2 Flowchart of defensive driving technology and capability requirements
2.2 防御性駕駛培訓(xùn)體系設(shè)計(jì)
(1)目標(biāo)
通過培訓(xùn)掌握危險(xiǎn)源識別、出車前的預(yù)防性自檢、各種道路和路口的防御性駕駛、應(yīng)急狀態(tài)下的防御性駕駛、各種氣候條件下的防御性駕駛。通過培訓(xùn)具備各種行車狀態(tài)下的防御性駕駛能力,預(yù)防不良駕駛習(xí)慣,熟悉和掌握常見緊急情況的處置原則和方法,熟悉和掌握道路交通事故現(xiàn)場的應(yīng)急處置方法與傷員救護(hù),熟悉和掌握事故后的脫困方法,熟悉和掌握乘客突發(fā)疾病的應(yīng)急處理,通過培訓(xùn)提升駕駛?cè)朔烙择{駛心理和生理、駕駛情緒智力方面的能力。
(2)培訓(xùn)方式
采用現(xiàn)代化多媒體課件、汽車駕駛模擬機(jī)器、實(shí)車等教學(xué)設(shè)備,開展理論教育、模擬實(shí)踐、實(shí)車操作、案例分析、安全體驗(yàn)等培訓(xùn)方式,結(jié)合駕駛?cè)说淖陨項(xiàng)l件進(jìn)行個(gè)性化培訓(xùn)。
(3)參考教學(xué)內(nèi)容及時(shí)間分配
根據(jù)防御性駕駛技術(shù)流程及能力分析、培訓(xùn)目標(biāo)及方式,得出參考防御性駕駛培訓(xùn)內(nèi)容及學(xué)時(shí)見表1。
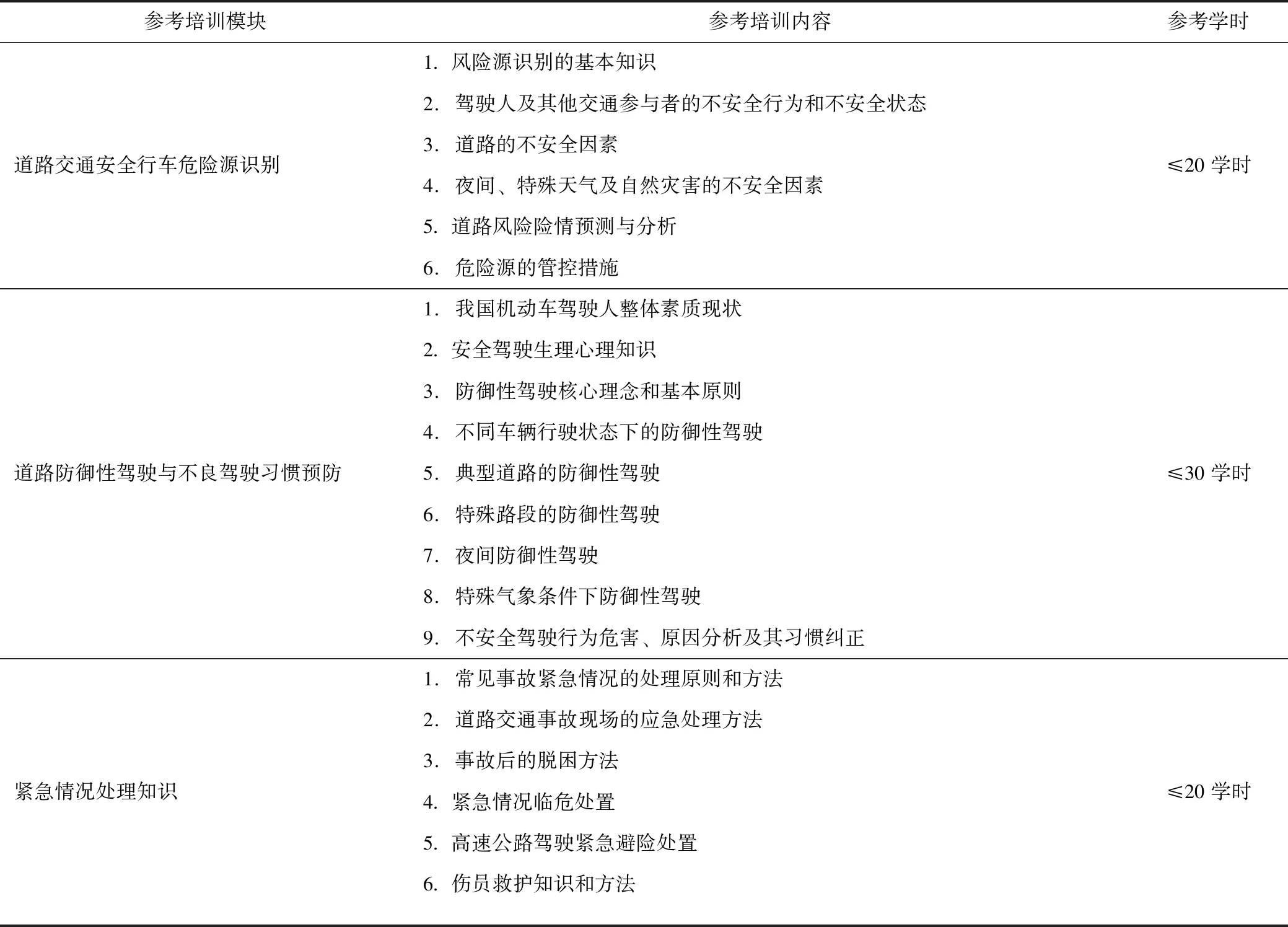
表1 參考社會車輛駕駛員防御性駕駛培訓(xùn)內(nèi)容及學(xué)時(shí)Tab.1 Reference of defensive training content and class hours of social vehicle drivers
3 表征防御性駕駛技術(shù)情緒智力的多元線性回歸模型
3.1 目標(biāo)與假設(shè)
目標(biāo):由圖1、圖2可以看出,實(shí)施防御性駕駛對駕駛?cè)四芰Φ囊笈c駕駛?cè)饲榫w智力兩者之間有多個(gè)共同的指標(biāo),同時(shí)也有不同的指標(biāo),兩者之間存在相關(guān)性,由此,本研究的目標(biāo)為發(fā)現(xiàn)防御性駕駛技術(shù)與駕駛?cè)诵那橹橇χg的關(guān)系,并對兩者之間的關(guān)系建模,實(shí)現(xiàn)關(guān)系量化研究。
假設(shè):防御性駕駛培訓(xùn)對于駕駛?cè)饲榫w智力只產(chǎn)生正面的影響;培訓(xùn)機(jī)構(gòu)對駕駛?cè)硕及凑辗烙择{駛的要求完成了培訓(xùn)的義務(wù);駕駛?cè)嗽诮邮芘嘤?xùn)時(shí)都按照要求完成了培訓(xùn)。
3.2 數(shù)據(jù)描述
(1)參與人員
本試驗(yàn)實(shí)施公開召集志愿者的方式,共召集13名社會車輛駕駛員志愿者,年齡在23~49歲之間,平均年齡36歲,標(biāo)準(zhǔn)偏差4.2周歲;駕齡在26~1年,標(biāo)準(zhǔn)偏差9.3年,平均駕齡3.8年。參與人員在被測試時(shí)均保持良好的精神狀態(tài),身體均無心血管等生理疾病,視力和聽力符合駕駛要求。
(2)設(shè)備描述
本試驗(yàn)測量的對象駕駛?cè)说那榫w智力,使用Schutte, N. S.等人[19]1998年,設(shè)計(jì)的量表和評價(jià)交通中情緒智力的觀察表,使用駕駛模擬器見圖3,綜合測量駕駛?cè)说男睦砗蜕怼Ⅰ{駛智力、情緒各項(xiàng)指標(biāo),總分共計(jì)100分,其中,模擬駕駛占70分,量表和觀測表總計(jì)30分。生理指標(biāo)18分,心理指標(biāo)34分,駕駛智力指標(biāo)30分,情緒指標(biāo)18分。
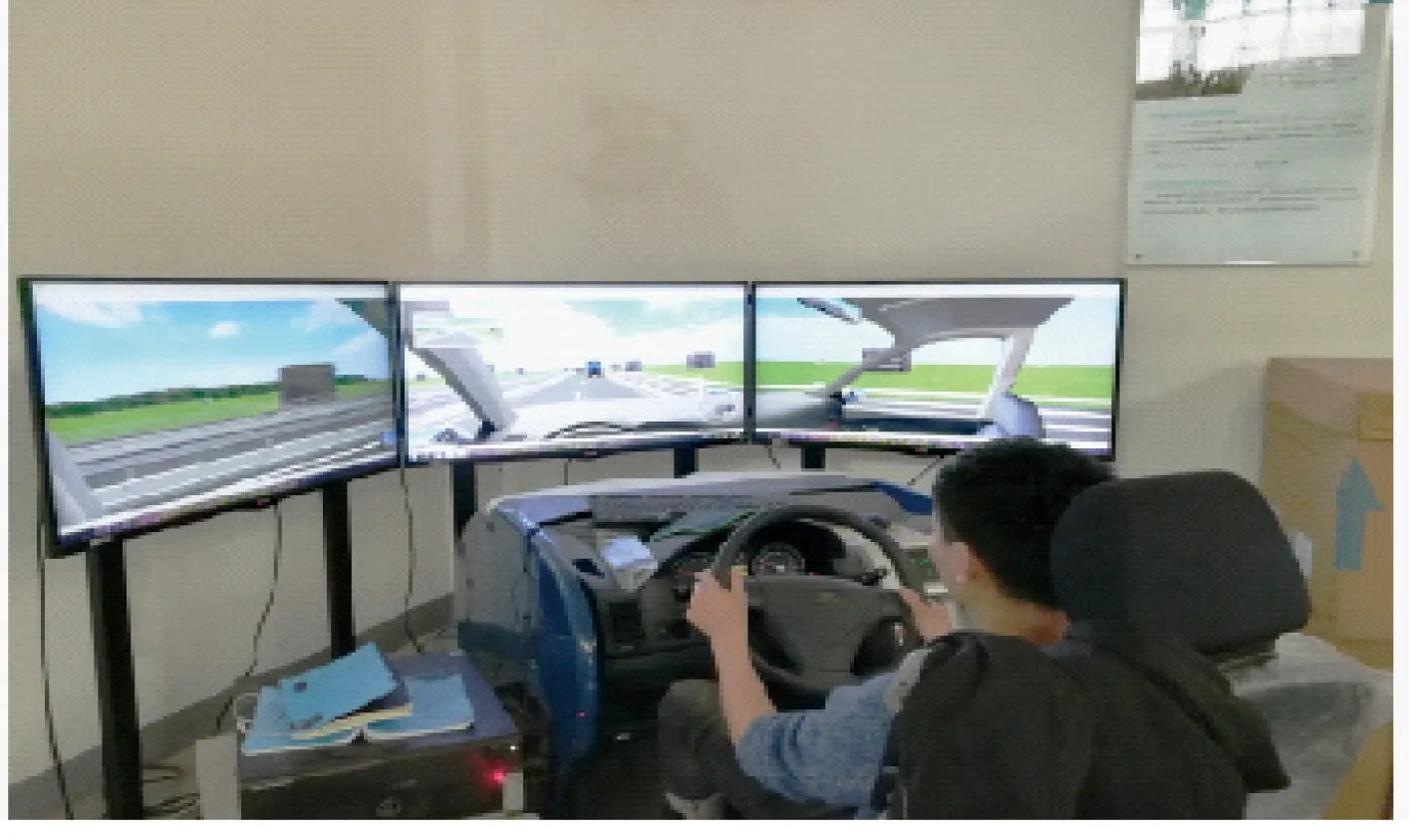
圖3 防御性駕駛模擬器Fig.3 Defensive driving simulator
(3)方式方法
參加者均經(jīng)歷兩個(gè)模擬場景:①模擬器中面對3組正面撞擊和翻車的情況。測試駕駛?cè)诵睦砗蜕怼⒅橇η闆r;②設(shè)置駕駛?cè)擞^看有情緒影響的片段,然后在模擬器上進(jìn)行在不同交通流飽和度條件下,開展防御性駕駛的實(shí)踐操作;③使用建議的等級量表進(jìn)行評估。參與者均參加了包括培訓(xùn)前、培訓(xùn)中、培訓(xùn)后的8次測試。
(4)數(shù)據(jù)收集
本研究共收集每名志愿者8次的測試數(shù)據(jù),共計(jì)104條數(shù)據(jù),列舉編號為1的駕駛?cè)藬?shù)據(jù)見表2。
由表2可以看出,駕駛?cè)朔烙詼y試得分隨著參加時(shí)長增加不斷提高,生理指標(biāo)得分隨著培訓(xùn)參加時(shí)長的增加變化不明顯;心理指標(biāo)得分在40 h之前增加緩慢,在40 h之后提升較為明顯;駕駛智力指標(biāo)得分在40 h之前增長較為明顯,在40 h之后增加緩慢;情緒指標(biāo)得分在40 h之前增長緩慢,在40 h 之后增加明顯。
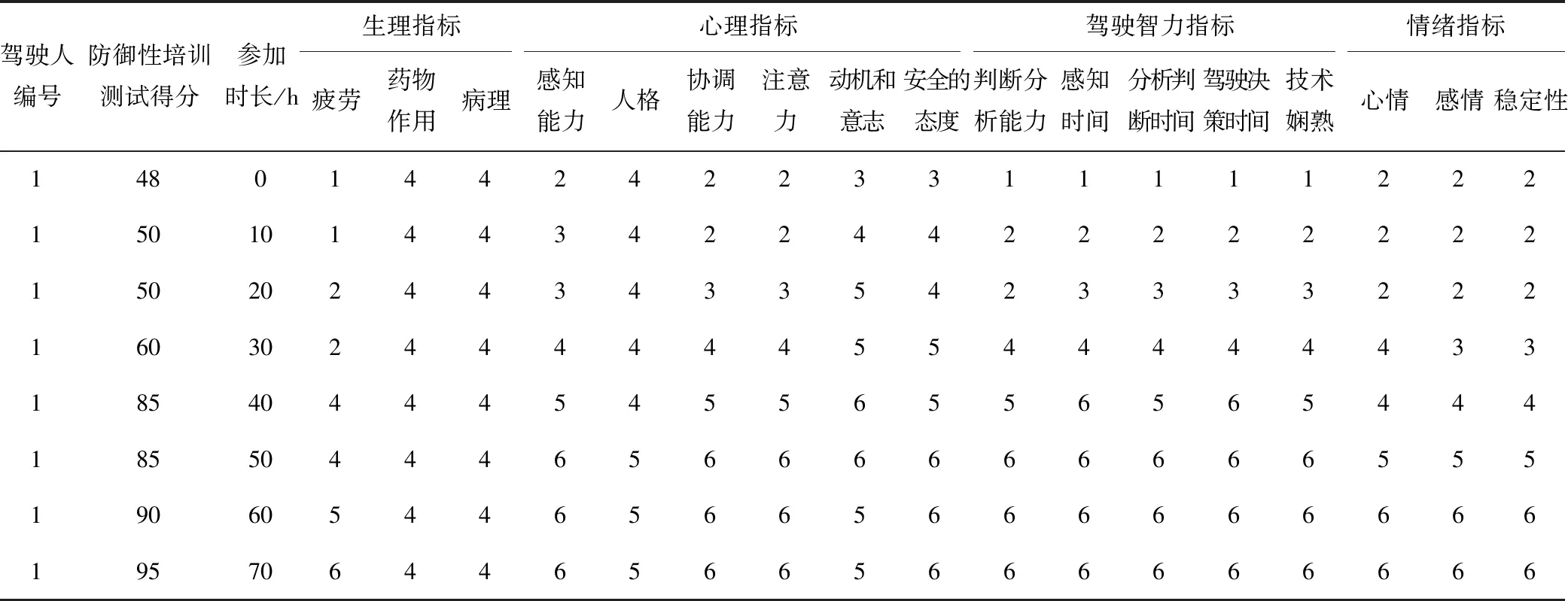
表2 部分參與人員情緒智力提升統(tǒng)計(jì)表Tab.2 Statistical table of emotional intelligence improvement of some participants
3.3 模型構(gòu)建
(1)線性關(guān)系觀測
假設(shè)駕駛?cè)松頌閤1,心理為x2,駕駛智力為x3,情緒為x4,時(shí)長為x5為因變量,y為防御性駕駛培訓(xùn)測試得分,為了觀測因變量y與各自變量之間是否存在較為明顯的線型關(guān)系,將y與x1,x2,x3,x4之間的變化映射到散點(diǎn)圖如圖4所示。
從圖4可以看出,點(diǎn)(xi,y)基本分布在兩條直線兩側(cè),結(jié)合表2的結(jié)果,我們可以構(gòu)建分段線型回歸模型。
(2)理論多元線性回歸模型
設(shè)因變量y與自變量x1,x2,…,xn-1共有n組實(shí)際觀測數(shù)據(jù),y是一個(gè)可觀測的隨機(jī)變量,它受到n-1個(gè)非隨機(jī)因素x1,x2,…,xn-1和ε隨機(jī)因素的影響,若y與x1,x2,…,xn-1有如下線性關(guān)系:
y=β0+β1x1+β2x2+…+βn-1xn-1+ε,
(1)
式中,y為因變量,x1,x2,…,xn-1為自變量;β0,β1,β2,…,βn-1是未知參數(shù);ε是均值為零,方差為σ2>0 的不可觀測的隨機(jī)變量,稱為誤差項(xiàng),并通常假定,ε~(0,σ2) 。
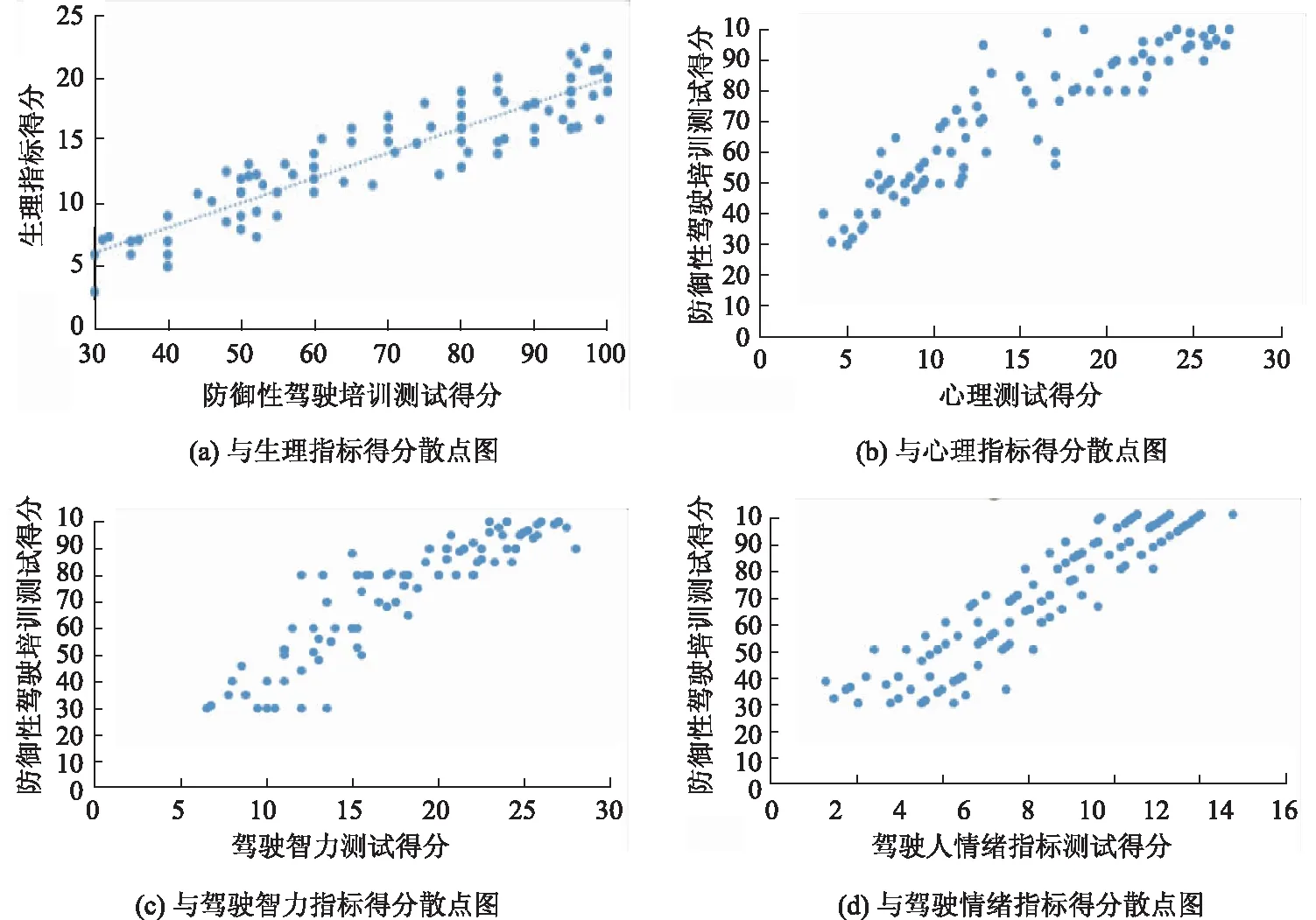
圖4 防御性駕駛培訓(xùn)測試得分與相關(guān)指標(biāo)散點(diǎn)圖Fig.4 Scatter grams of defensive driving training scores vs. related indicators
(3)模型檢驗(yàn)
F檢驗(yàn)是根據(jù)平方和分解式,直接從回歸效果檢驗(yàn)回歸方程的顯著性,F(xiàn)檢驗(yàn)具有直觀,精準(zhǔn)的特性[20],由此,本研究使用F檢驗(yàn)的方法進(jìn)行模型的線性特性檢驗(yàn),具體的檢驗(yàn)過程放在方差分析表中進(jìn)行,見表3。

表3 方差分析表Tab.3 Table of variance analysis
其中,SSE為殘差平方和,SSR為回歸平方和,SST為總離差平方和。F為檢驗(yàn)統(tǒng)計(jì)量,p為自變量的個(gè)數(shù)。
(4)結(jié)果分析
對于50個(gè)訓(xùn)練樣本利用SPSS 22.0得出x1,x2,x3,x4,x5的回歸系數(shù)見表4,表中,“/”表示培訓(xùn)40 h前后兩個(gè)階段。
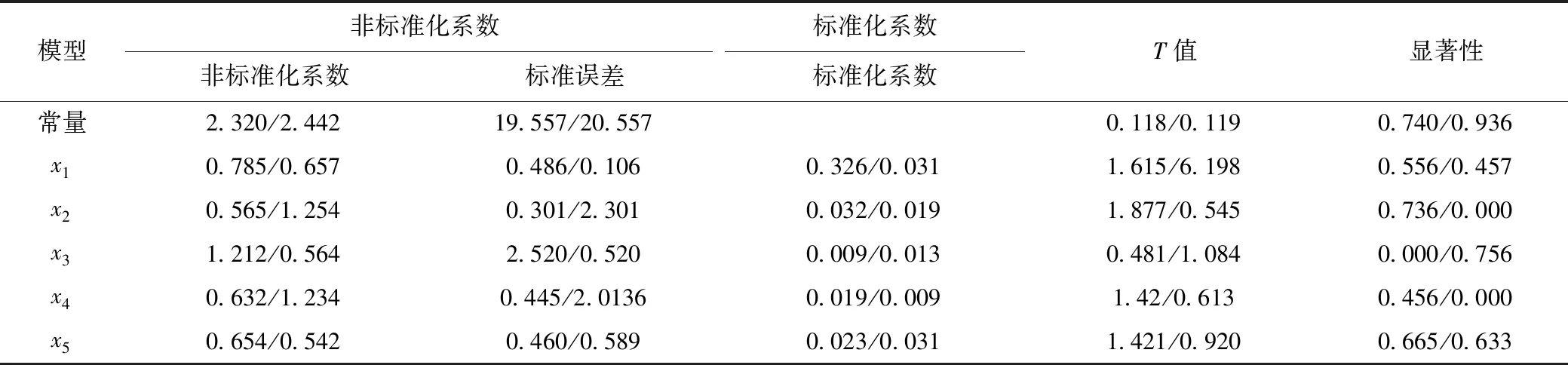
表4 回歸系數(shù)表Tab.4 Table of regression coefficient
得出4個(gè)自變量的多元線性回歸模型為公式(2)。得出回歸方差分析結(jié)果見表5。
(2)
由公式(2)可以看出,在培訓(xùn)時(shí)長小于40 h時(shí),防御性駕駛培訓(xùn)效果與駕駛?cè)酥橇μ嵘嚓P(guān)性最大,此階段駕駛?cè)酥饕憩F(xiàn)為感知、分析判斷、決策、實(shí)施的敏捷性提升;在培訓(xùn)時(shí)長大于40 h時(shí);防御性駕駛培訓(xùn)效果與駕駛?cè)诵睦砗颓榫w相關(guān)性最大,此階段駕駛?cè)酥饕憩F(xiàn)為目標(biāo)、意志、動機(jī)、自我控制、情緒穩(wěn)定性的提升。
由表5可以看出,Sig. 即顯著性P值≈0.058/0.036可知,此回歸方程顯著,即做出的5個(gè)自變量對因變量y產(chǎn)生顯著線性影響的判斷犯錯(cuò)率的概率僅為0.058/0.036。

表5 回歸方差分析結(jié)果Tab.5 Variance analysis regression result
注:#預(yù)測變量:(常量)x1,x2,x3,x4,x5。
4 結(jié)論
本研究針對防御性駕駛培訓(xùn)與駕駛?cè)饲榫w智力關(guān)系研究欠缺的問題,分析了影響駕駛?cè)饲榫w智力的因素,構(gòu)建了駕駛?cè)饲榫w智力評價(jià)指標(biāo),分析了防御性駕駛技術(shù)的實(shí)施流程及對駕駛?cè)四芰Φ囊螅瑢﹂_展防御性駕駛培訓(xùn)體系給出了總體的設(shè)計(jì)框架,為了進(jìn)一步量化表示兩者的關(guān)系,提出了一種表征防御性駕駛技術(shù)培訓(xùn)與駕駛?cè)饲榫w智力提升之間關(guān)系的多元線性回歸模型,此模型分兩個(gè)階段描述駕駛?cè)诵睦砗蜕怼Ⅰ{駛智力、情緒、學(xué)習(xí)時(shí)長5個(gè)自變量與防御性駕駛培訓(xùn)成效因變量之間的線性關(guān)系。并對多元線性回歸模型的有效性進(jìn)行了F檢驗(yàn),驗(yàn)證效果顯示了模型的有效性。通過模型分析對駕駛?cè)碎_展防御性駕駛培訓(xùn)得出兩點(diǎn)結(jié)論:(1)對駕駛?cè)说姆烙择{駛培訓(xùn)在最初的階段,技能的嫻熟性提升效果最佳,應(yīng)重點(diǎn)加強(qiáng)防御性駕駛基礎(chǔ)知識的培訓(xùn);(2)在駕駛?cè)说姆烙择{駛培訓(xùn)的深入階段,駕駛?cè)说男睦砗颓榫w提升效果最佳,應(yīng)重點(diǎn)加強(qiáng)防御性駕駛認(rèn)知、安全意識、自我控制、意志與動機(jī)等情緒智能方面的培訓(xùn)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
辦公室業(yè)務(wù)(2020年18期)2020-09-29 12:15:58
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
勞動保護(hù)(2019年7期)2019-08-27 00:41:26
風(fēng)流一代·青春(2018年2期)2018-02-26 15:27:06
風(fēng)流一代·青春(2017年6期)2018-02-14 19:28:55
風(fēng)流一代·青春(2017年5期)2018-02-14 09:32:37
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
商業(yè)評論(2014年6期)2015-02-28 04:44:25