鏈帶式關(guān)節(jié)機器人并軸驅(qū)動機構(gòu)設(shè)計*
2020-06-20 09:19:30曾祥彪孫令真陳伏華王秀敏林祥智
工程技術(shù)研究 2020年9期
關(guān)鍵詞:設(shè)置
曾祥彪,孫令真,陳伏華,王秀敏,林祥智
(廣州華立科技職業(yè)學(xué)院,廣東 廣州 511325)
1 引言
多關(guān)節(jié)機器人是工業(yè)生產(chǎn)中常見的機器人形態(tài)之一,其中六軸關(guān)節(jié)機器人由于作業(yè)范圍較廣且具有較為靈活的機動性能,因此在自動裝配、噴漆、搬運等各種復(fù)雜作業(yè)環(huán)境下通常采用六軸關(guān)節(jié)機器人[1]。為了避免各個軸或手臂轉(zhuǎn)動過快的問題,六軸關(guān)節(jié)機器人的各個關(guān)節(jié)處通常設(shè)置有減速機[2]。但六軸機器人的減速機在運轉(zhuǎn)過程中常常存在不穩(wěn)定的問題,進而造成機器人作業(yè)時工作不平穩(wěn)。針對這一問題,文章提出了鏈帶式六軸關(guān)節(jié)機器人并軸驅(qū)動機構(gòu)的整體設(shè)計方案[3]。
2 鏈帶式六軸關(guān)節(jié)機器人的主體結(jié)構(gòu)
鏈帶式六軸關(guān)節(jié)機器人主體結(jié)構(gòu)圖如圖1所示。鏈帶式六軸關(guān)節(jié)傳動機器人包括基座、轉(zhuǎn)動座、第一手臂、第一關(guān)節(jié)、第二手臂、第二關(guān)節(jié)、操作手。基座上設(shè)置有用于驅(qū)動轉(zhuǎn)動座轉(zhuǎn)動的第一驅(qū)動機構(gòu),轉(zhuǎn)動座上設(shè)置有用于驅(qū)動第一手臂轉(zhuǎn)動的第二驅(qū)動機構(gòu),第二手臂上設(shè)置有用于驅(qū)動第一關(guān)節(jié)轉(zhuǎn)動的第三驅(qū)動機構(gòu),第一關(guān)節(jié)上設(shè)置有用于驅(qū)動第二手臂轉(zhuǎn)動的第四驅(qū)動機構(gòu),第二手臂上設(shè)置有用于驅(qū)動第二關(guān)節(jié)轉(zhuǎn)動的第五驅(qū)動機構(gòu),第二關(guān)節(jié)上設(shè)置有用于驅(qū)動操作手轉(zhuǎn)動的第六驅(qū)動機構(gòu)。第一、二、三、四、五、六驅(qū)動機構(gòu)均包括驅(qū)動電機和減速機,驅(qū)動電機和對應(yīng)的減速機之間均通過傳送帶或傳送鏈傳動連接。轉(zhuǎn)動座包括用于與基座轉(zhuǎn)動裝配的轉(zhuǎn)動部以及外延至基座外側(cè)的外延部,第一手臂轉(zhuǎn)動裝配在外延部上,在作業(yè)過程中與轉(zhuǎn)動座之間呈銳角,這樣避免了六軸關(guān)節(jié)機器人在作業(yè)過程中重心外懸量過大的情況,控制六軸關(guān)節(jié)機器人的重心始終處于靠近基座的位置。
3 第一驅(qū)動機構(gòu)至第六驅(qū)動機構(gòu)的傳動原理
鏈帶式六軸機器人在使用時,第一驅(qū)動機構(gòu)驅(qū)動轉(zhuǎn)動座轉(zhuǎn)動,第二驅(qū)動機構(gòu)驅(qū)動第一手臂擺動,第三驅(qū)動機構(gòu)驅(qū)動第一關(guān)節(jié)擺動,第四驅(qū)動機構(gòu)驅(qū)動第二手臂進行周向方向的自轉(zhuǎn),第五驅(qū)動機構(gòu)驅(qū)動第二關(guān)節(jié)擺動,第六驅(qū)動機構(gòu)驅(qū)動操作手進行周向方向的自轉(zhuǎn)。第一驅(qū)動機構(gòu)的減速機設(shè)置在第一防護殼內(nèi),第一防護殼為正方體狀并由四塊正方形板拼接而成;第一手臂整體為H型。

圖1 鏈帶式六軸關(guān)節(jié)機器人主體結(jié)構(gòu)圖
4 鏈帶式關(guān)節(jié)機器人并軸驅(qū)動機構(gòu)設(shè)計方案
鏈帶式關(guān)節(jié)機器人的設(shè)計主要包括第一、四、五、六驅(qū)動機構(gòu)的并軸驅(qū)動機構(gòu)與第二、三驅(qū)動機構(gòu)的同軸驅(qū)動機構(gòu)。鏈帶式六軸關(guān)節(jié)機器人并軸驅(qū)動機構(gòu)的結(jié)構(gòu)示意圖如圖2所示。
4.1 并軸驅(qū)動機構(gòu)的結(jié)構(gòu)設(shè)計
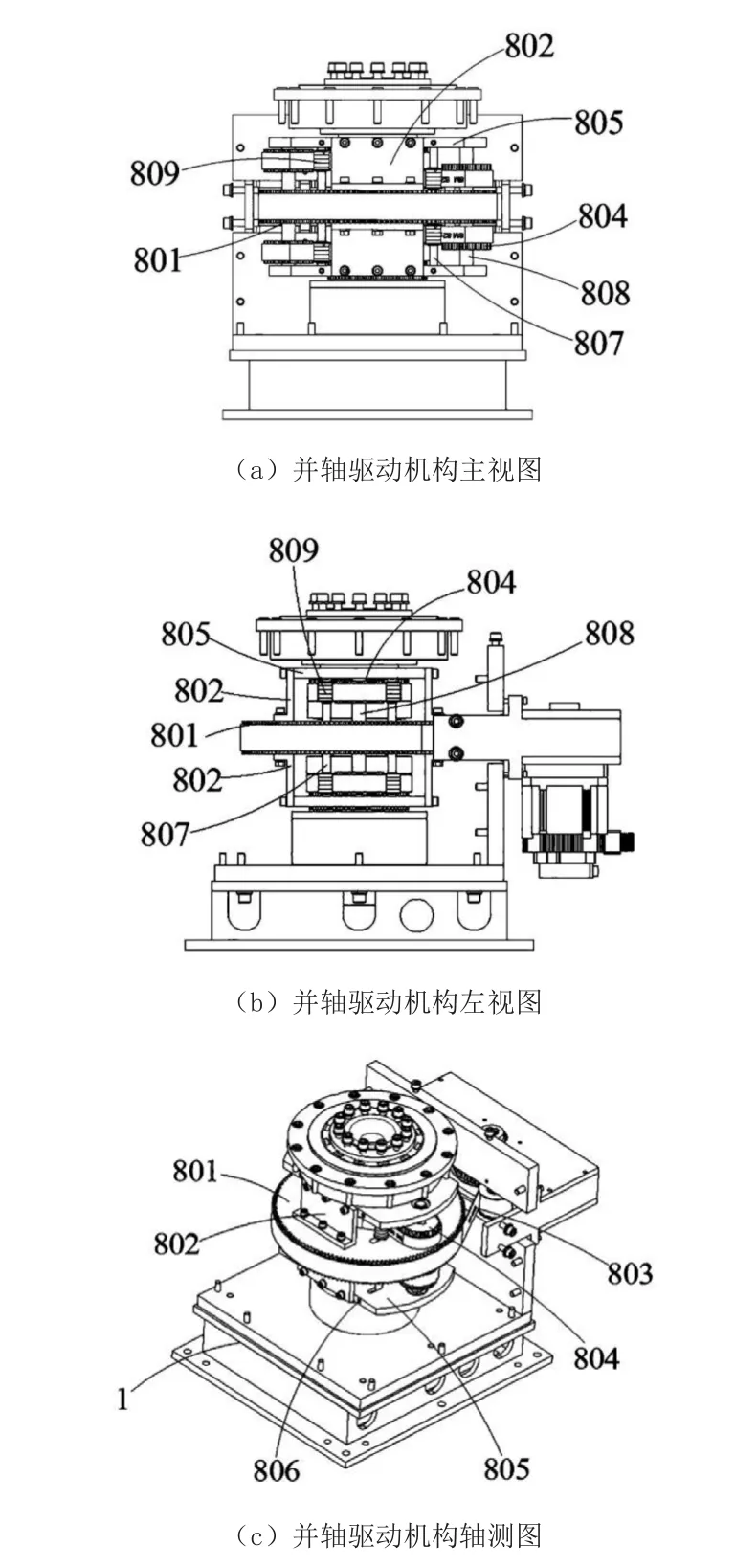
圖2 鏈帶式六軸關(guān)節(jié)機器人并軸驅(qū)動機構(gòu)的結(jié)構(gòu)示意圖
第一、二、三、四、五、六驅(qū)動機構(gòu)均包括驅(qū)動電機和減速機,驅(qū)動電機和減速機之間通過傳動帶傳動連接。第一、四、五、六驅(qū)動機構(gòu)為并軸驅(qū)動機構(gòu),其中的驅(qū)動電機和減速機分別稱為并軸驅(qū)動電機和并軸減速機。所謂并軸驅(qū)動機構(gòu),即并軸驅(qū)動電機的傳動軸與并軸減速機的并軸主動軸平行。由于第一、四、五、六驅(qū)動機構(gòu)的結(jié)構(gòu)基本相同,僅是規(guī)格和型號之間存在差異,以下僅以第一驅(qū)動機構(gòu)為例對并軸驅(qū)動機構(gòu)進行詳細(xì)說明。如圖2所示,并軸減速機設(shè)置有并軸主動輪,并軸驅(qū)動電機的輸出軸上安裝有驅(qū)動齒輪,并軸主動輪通過傳動帶與驅(qū)動齒輪傳動連接,并軸主動輪的轉(zhuǎn)動中心(即圓心)位置轉(zhuǎn)動裝配有并軸主動軸,并軸主動軸和并軸主動輪之間裝配有軸承,并軸主動軸的一端即為動力輸出端。并軸主動軸的偏心位置轉(zhuǎn)動裝配有兩個并軸從動軸,兩個并軸從動軸關(guān)于并軸主動輪的轉(zhuǎn)動中心對稱,其與并軸主動輪之間也裝配有軸承。各并軸從動軸上均裝配有兩個并軸公轉(zhuǎn)輪,分別位于并軸主動輪的兩側(cè);并軸主動軸上安裝有兩個并軸從動輪,兩個并軸從動輪分別位于并軸主動輪的兩側(cè)。位于同一側(cè)的兩個并軸公轉(zhuǎn)輪均通過傳動帶傳動裝配在對應(yīng)的并軸從動輪上。并軸主動輪上還設(shè)置有四個并軸撐頂軸,分別位于同一矩形的四個拐角處;各并軸撐頂軸上均設(shè)置有兩個并軸撐頂輪,分別位于并軸主動輪的兩側(cè)。并軸撐頂輪能夠撐頂并軸主動輪和對應(yīng)并軸公轉(zhuǎn)輪之間的傳動帶。
并軸驅(qū)動機構(gòu)還包括兩個分別設(shè)置在并軸主動輪兩側(cè)的并軸連接板,各并軸從動軸、各并軸撐頂軸的兩端分別安裝在對應(yīng)的并軸連接板上。其中,各并軸從動軸的兩端均通過軸承轉(zhuǎn)動裝配在對應(yīng)的并軸連接板上,而各并軸撐頂軸的兩端均通過頂絲固定在對應(yīng)的并軸連接板上;并軸連接板上設(shè)置有供各并軸撐頂軸插入的通孔,當(dāng)并軸撐頂軸插入后,通過從各通孔的側(cè)壁旋入頂絲即可實現(xiàn)對并軸撐頂軸端部的固定。各并軸連接板與并軸主動輪之間均固定有兩個并軸加強板,同一側(cè)的兩個并軸加強板關(guān)于轉(zhuǎn)動中心對稱;各并軸加強板的兩側(cè)均通過螺絲進行固定。
4.2 并軸驅(qū)動機構(gòu)的傳動原理
并軸驅(qū)動機構(gòu)運行時,并軸驅(qū)動電機通過傳動帶帶動并軸主動輪轉(zhuǎn)動,并軸主動輪的轉(zhuǎn)動又會帶動各并軸從動軸和各并軸公轉(zhuǎn)輪進行公轉(zhuǎn),并軸公轉(zhuǎn)輪的公轉(zhuǎn)又會帶動對應(yīng)的并軸從動輪進行轉(zhuǎn)動,從而帶動并軸主動軸的轉(zhuǎn)動,這樣并軸主動軸即可從輸出端輸出動力。
4.3 并軸驅(qū)動機構(gòu)的整體設(shè)計
第一、四、五、六驅(qū)動機構(gòu)均為并軸驅(qū)動機構(gòu),其驅(qū)動電機和減速機并列布置。并軸驅(qū)動機構(gòu)的減速機設(shè)置有并軸主動輪,并軸主動輪的圓心位置轉(zhuǎn)動裝配有并軸主動軸,偏心位置轉(zhuǎn)動裝配有多個并軸從動軸;并軸主動軸上設(shè)置有并軸從動輪,各并軸從動軸上均設(shè)置有并軸公轉(zhuǎn)輪,并軸公轉(zhuǎn)輪與并軸從動輪之間傳動連接。并軸驅(qū)動機構(gòu)的減速機還包括兩個分別設(shè)置在并軸主動輪兩側(cè)的并軸連接板,各并軸從動軸的端部均轉(zhuǎn)動裝配在對應(yīng)的并軸連接板上,并軸主動輪與對應(yīng)的并軸連接板之間均安裝有并軸加強板。此種結(jié)構(gòu)通過設(shè)置并軸連接板和并軸加強板使得并軸驅(qū)動機構(gòu)的減速機形成一個整體。并軸主動輪上還設(shè)置有多個并軸撐頂軸,各并軸撐頂軸均安裝有并軸撐頂輪,兩端分別通過頂絲固定在對應(yīng)的并軸連接板上。并軸撐頂輪的設(shè)置能夠撐頂傳動帶或傳動鏈,從而保證傳動的良好運行,避免了傳動過程中打滑的問題;而并軸撐頂軸的設(shè)置還起到了加強減速機結(jié)構(gòu)的作用,使得減速機成為一個整體。
5 結(jié)論
關(guān)節(jié)機器人并軸驅(qū)動機構(gòu)傳動部件的整體設(shè)計,保證驅(qū)動機構(gòu)具有良好的傳動性能,避免了傳動過程中打滑的問題,還起到了加強減速機結(jié)構(gòu)的作用。因并軸驅(qū)動機構(gòu)采用空心的管狀結(jié)構(gòu),重量輕,縮減了材料成本,可實現(xiàn)空中布導(dǎo)線(俗稱空中走線),更有利于減速機作業(yè)時運行平穩(wěn),提高六軸關(guān)節(jié)機器人作業(yè)時的穩(wěn)定性。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業(yè)后醫(yī)學(xué)教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫(yī)學(xué)院學(xué)報(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
