基于工程訓練綜合能力競賽全地形小車的設計
2020-06-23 09:36:38吳貞杰
科技創新與應用 2020年19期
吳貞杰
摘 ?要:根據第六界全國大學生工程訓練綜合能力競賽四川賽區全地形小車項目的要求,設計并組裝了一種具備通過樓梯、管道、窄橋等障礙功能的全地形智能小車,完成對小車運動速度和運動方向的控制,經過實踐,實現了小車在賽道上的穩定可靠行進。
關鍵詞:工程訓練;全地形小車;自控越障;傳感器
中圖分類號:TP23 ? ? ? ? 文獻標志碼:A 文章編號:2095-2945(2020)19-0103-02
Abstract: According to the requirements of the all-terrain trolley project of the Sixth National College Students Comprehensive Training Ability Competition in Sichuan Province, this paper designs and assembles an all-terrain intelligent trolley with the function of passing through stairs, pipes, narrow bridges and other obstacles, thus completing the control of the speed and direction of the trolley. Through practice, this design has achieved a stable and reliable movement of the trolley on the track.
Keywords: engineering training; all-terrain trolley; automatic obstacle crossing; sensor
引言
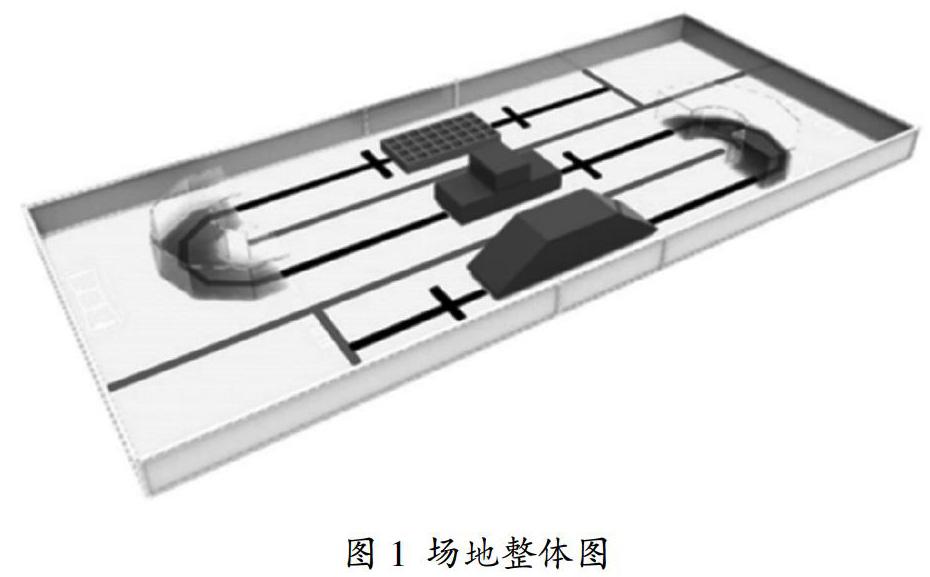
全國大學生工程訓練綜合能力競賽是全國性大學生科技創新實踐競賽活動,是基于國內各高校綜合性工程訓練教學平臺,為深化實驗教學改革,提升大學生工程創新意識、實踐能力和團隊合作精神,促進創新、創業人才培養而開展的一項公益性科技創新實踐活動。在第六屆競賽四川賽區中,賽會在傳統“8字型賽道”,“S 型賽道”項目和自控小車越障競賽外,增加了全地形小車項目。規則要求場地中設定四種五個不同特點、不同難度的障礙物,每種障礙物均有一定的分值,參賽隊根據比賽規則自主設計制作全地形小車,完成穿越各個障礙物的比賽。障礙物分別為模擬工業用柵格地毯、樓梯、管道、窄橋,各障礙物由黑色引導線連接,形成完整的比賽賽道,并設置比賽起點和終點,并要求全地形小車應完全自主控制,一旦啟動,不允許人為遙控、無線控制干預和操作。場地如圖1所示。
1 小車機械機構的設計
由于比賽的賽道共有5個障礙物,分別是窄橋、臺階、柵格地毯和兩個u型隧道,小車需要順利通過這些障礙物就需要它具有良好的通過性和穩定性,經實踐發現履帶比輪子穩定性更高,更容易通過障礙物,所以小車采用4個電機帶動4個大輪為其提供充足的動力,小車的每側都是采用前后兩個大輪以及在兩個大輪中間靠近前輪的地方裝配上了一個小輪的結構,并讓小輪和前大輪形成一個小的傾角再用履帶連接,這樣就使小車能更具行駛的平穩性和上樓梯的能力。在小車上裝配了近紅外傳感器,由于近紅外傳感器在彎道中的數字量與在彎道外的數字量不同,從而實現小車在彎道中與彎道外表現不同的運動狀態。通過將2個灰度傳感器平行裝配在小車前端,將兩個白標傳感器裝配在小車中間靠后的位置,4個傳感器呈等腰梯形式的分部,從而使小車在運動過程中即便產生了較大程度的偏移,也能通過4個傳感器的檢測從而更方便快捷的做出糾偏行為。由于小車在運動過程中會產生碰撞等運動狀態,而發生碰撞后極有可能會碰撞到灰度和白標傳感器從而損壞傳感器,因此為了保護傳感器,我們加上了傳感器保護裝置,從而有效的避免了傳感器被碰,增加了傳感器的安全性能。
2 小車控制系統的設計
2.1 小車轉向
由于制作的是履帶式小車,所以可以通過兩側履帶的速度差實現不同程度的轉彎。例如,如果想實現小車向左轉向,那就可將左右兩側的履帶通過調節電機的輸出功率,以使其擁有不同速率以達到轉向的目的。同理如果要實現小車向右轉向,那么就可以將小車左邊電機的輸出功率調大一點,將右側電機的輸出功率調小一點,從而實現小車右轉。當然小車轉彎角度的大小也是可以通過兩側的速度差值大小來調節,如果想讓小車往右側進行大幅度的轉彎,就可以將小車右側的電機功率調得比左側功率更小一些,就可以實現小車大幅度的右轉。
2.2 程序控制
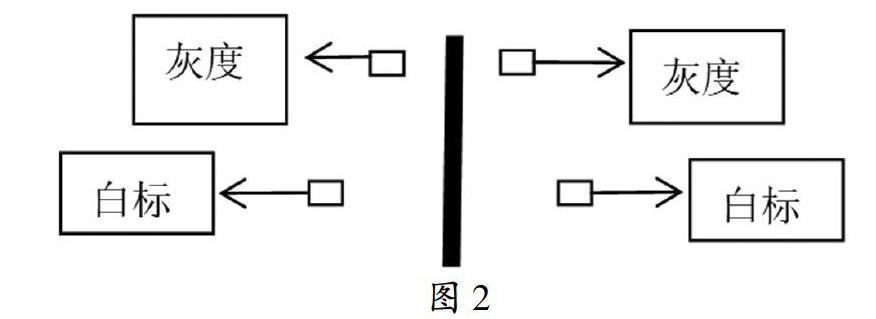
履帶式小車一共用了5個傳感器,分別是平行裝配在小車底盤前端的兩個灰度傳感器、兩個平行裝配在小車底盤靠后的兩個白標傳感器和裝配在小車車身前端的近紅外傳感器,其中兩個灰度傳感器相距49mm,兩個白標之間相距81mm,白標傳感器與灰度傳感器相距97mm,如圖2所示。
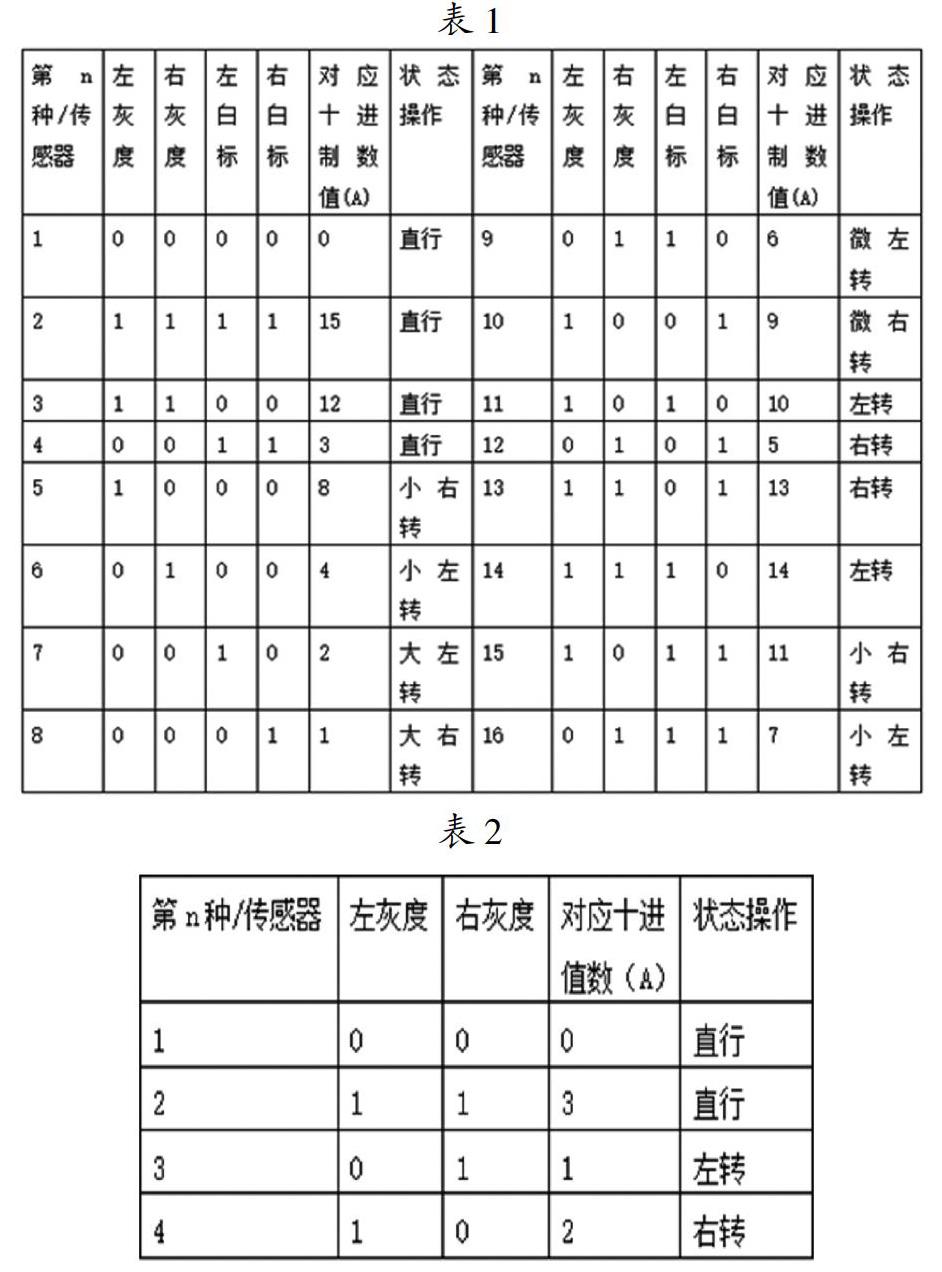
由于賽道上有一條貫穿全程的引導黑線,所以我們是想通過灰度傳感器和白標傳感器來尋跡。灰度傳感器檢測到黑線時數字量為0,不是黑線時的數字量為1。白標傳感器檢測到黑線時數字量為1,不是黑線時的數字量為0。兩個灰度和兩個白標傳感器會產生16種不同的組合情況,而小車狀態會隨傳感器組合方式的變化而變化,所有情況如表1、表2所示。
如上表所示當小車上的灰度傳感器和白標傳感器通過判斷小車在行駛過程中出現的傳感器組合方式來進行直行,小左轉,小右轉,左轉,右轉等狀態操作。但是當小車進入u型隧道時如果繼續執行正常外部轉彎程序的話會導致小車在u型隧道里的轉彎出現碰壁,倒退等異常情況,于是采用了近紅外傳感器檢測小車是否進入彎道。當小車進入彎道后,近紅外傳感器反饋給單片機“0”的信號,從而讓小車執行另外獨立的隧道轉彎程序。但由于我們的白標傳感器在u型隧道中有時會出現失靈的情況而灰度傳感器則不會發生失靈的情況,于是小車在進行隧道轉彎時就只用灰度傳感器和近紅外傳感器來循跡。當小車在進行隧道轉彎時,近紅外傳感器反饋給單片機“0”的信號,灰度傳感器的組合方式及小車的狀態操作如表2所示。如表1和2所示,我們將小車上傳感器所有的組合方式通過十進制值數(A)表示。
2.3 小車狀態操作程序框圖如圖3所示
3 結束語
通過現場實際運行,該全地形小車在比賽中按要求平穩順利通過了設置的障礙物,圓滿完成任務,同時獲得了較好的成績。該全地形小車的設計為今后智能小車的實際應用,提供了設計思路。
參考文獻:
[1]鄭才國,肖梁.全地形小車設計與實現[J].現代機械,2019(3):44-47.
[2]范作鑫,侯文靜,楊廣東.基于競賽的智能小車設計[J].電子世界,2020(04):151-152.
[3]黃淑新,蔡孟凱,楊智,等.工程訓練綜合能力競賽無碳小車控制系統設計[J].機電工程技術,2018,47(3):11-16.