軍事活動影響下的終端區容量評估方法研究
2020-06-27 04:35:44黃海清甘旭升丁黎穎孫靜娟
航空工程進展 2020年3期
黃海清,甘旭升,丁黎穎,孫靜娟
(1.西京學院 理學院, 西安 710123)(2.空軍工程大學 空管領航學院, 西安 710051)
0 引 言
軍事活動作為制約終端區容量評估有效性的關鍵因素,準確地預測終端區容量對于提高空域管理水平具有重大意義。2010年,由于軍用航空活動的限制,蘭州管制區內有近320架次的航班受到軍事活動的影響,其中航班盤旋最長時間達到40分鐘。2014年,東南沿海的軍事演習造成了大量的航班延誤甚至取消。大量的軍用航空活動,對民航航班的飛行造成一定的影響。軍事活動已經成為終端區容量的重要影響因素。目前國內對于軍事活動影響下的終端區容量評估的研究很少,大多是定性的評估,定量的分析較少。軍事活動性質比較特殊,飛行流控時間較長,且占用高度層范圍大,需要在各個活動區域內不斷穿越高度層,或者在不同的活動區域內相互穿越,因此對活動區域周邊的航路航線影響較大;且軍事受限區所需要考慮的因素更加多樣化,包括天氣、飛機偏航、空中風、飛行員操縱等。因此,軍事受限區的劃設成為一個難點。
目前,國內外對于空域容量的評估方法主要有四種:一是基于數學模型的評估方法;二是基于歷史數據的評估方法;三是通過計算機仿真的評估方法;四是通過管制員工作負荷評估的方法。國外,T.R.Inniss等[1]根據危險天氣的統計數據來估算對到達容量的影響;J.Krozel等[2]通過圓錐形空域來模擬機場終端區,并給出了短期的確定性容量預測及相應的概率分布;J.Zou等[3]應用最大流和最小割定理來對危險天氣影響下的空域容量進行評估;M.Janic[4]利用管制員工作負荷量來評估容量,并研究了不同的空中交通管制操作程序、間隔規則和服務規則對空域容量的影響;P.Volf[5]將扇區空域作為研究對象,通過對管制員工作負荷和管制員承受能力的研究,以管制員可承受的負荷閾值作為限制計算最大的飛行架次。國內,劉歡[6]充分考慮了軍用航空影響、天氣改變等動態因素,構建了區域動態容量評估模型,并開發出了區域容量評估系統;王少朋等[7]分別從理論和應用方面研究了管制員工作負荷評估,并以此構建了基于管制員工作負荷的區域扇區容量評估模型;楊昌其等[8]基于BP神經網絡模型,建立了管制員疲勞狀態的識別方法。然而,由于軍方活動的特殊性,目前還沒有相應的數學模型和歷史數據庫。國內外對于空域容量的評估方法,大都不適用于軍事活動影響下空域容量評估,需要重新構建一套適用于軍方活動影響下的評估體系。
國內學者主要利用數學分析法來求解終端區容量。但該方法隨著節點的增多,計算的復雜度呈指數型上升,且由于算法本身的限制不適合用計算機進行大規模的編程。
本文將軍事活動作為影響因素加入到流量決策當中,利用最大流最小割理論[9-11]從定量的角度求解軍事活動影響下的終端區容量,在分析傳統算法的特點及缺陷的基礎上,用改進的遺傳算法求解軍事活動影響下的終端區容量,并與傳統算法進行比較驗證。
1 基本概念
1.1 飛行受限區
飛行受限區就是指當受到惡劣天氣、軍事活動或者流量控制等因素影響時,為了保障飛行安全在規定時間段內而禁止飛越的空域。
在本文中,將受到軍事活動影響的區域作為飛行受限區,民航航班在飛行過程中不得在該區域內通過。
1.2 終端區動態容量
終端區動態容量一般指在一定空域結構下考慮管制規則和一些相關因素(如軍事活動)的影響,且一直有航空器在終端區進出的情況下,單位時間內所能容納的最大航空器數量。
1.3 最大流最小割定理
在任一個網絡G的所有割集中,其最小的割集流量之和就等于該網絡最大流的流量。
目前,已經有人將最大流最小割理論應用在多邊形中,用兩條邊來代表源(S)和匯(T)。而在從源(S)到匯(T)的各個通路中,其通行能力由容量來決定。 而整個網絡中容量最小的部分就是網絡的最小割,也就是整個網絡的咽喉部分或者瓶頸,是決定該網絡通行能力的直接因素。多邊形最小割示意圖如圖1所示。
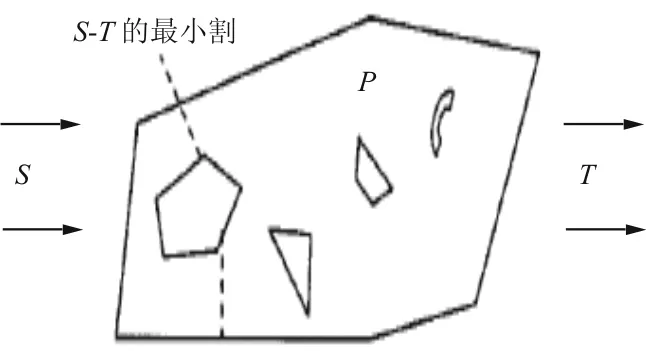
圖1 多邊形最小割示意圖
2 飛行受限區的劃設
2.1 飛行活動區的確定
軍用航空飛行活動往往會受到飛行員動作誤差、空中風向的影響,不同的動作所需要的空域范圍是不同的。在確定飛行受限區時,需要確定不同科目所需要的活動范圍。本文中軍用航空飛機所需要的空域范圍是利用數學模型,并結合飛行特點來確定的,通過蒙特卡洛法確定實際的圓心和機動半徑,進而求出右側邊界的位置。
2.1.1 轉彎半徑的計算
通常戰斗機飛行員的動作誤差服從正態分布,其分布函數為
(1)
式中:Mshould為期望動作誤差;Mlast為實際動作誤差;σp為標準差。
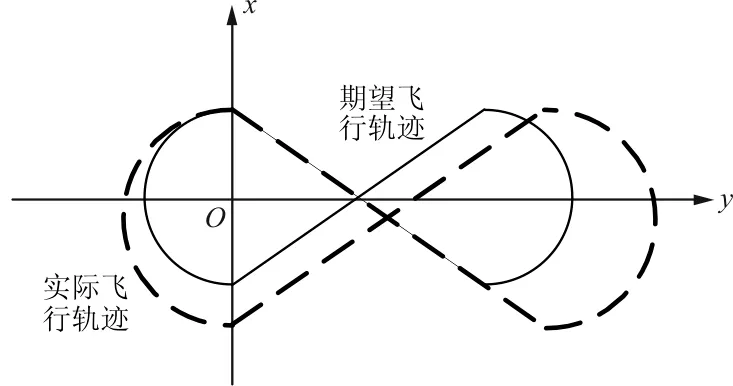
在飛機飛行訓練的過程中,影響飛機機動軌跡的因素主要有機動起點、轉彎的坡度、轉彎的速度、風及其導航設施的精度等,飛行軌跡圖如圖2所示,其中飛機的期望機動軌跡為實線所示,然而由于受到了全向風和動作的影響,其運動軌跡如虛線所示。
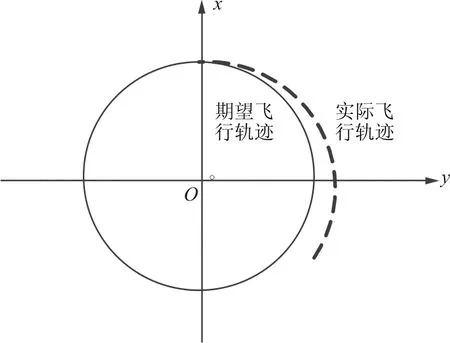
圖2 飛行軌跡圖
通過轉彎半徑的計算可知轉彎半徑與其飛行速度及坡度的關系為
(2)
假設期望的飛行速度v=250 m/s(900 km/h),期望轉彎坡度γ=45°,由于受到動作誤差的影響,其服從式(1)的正態分布,因此在速度誤差和轉彎坡度誤差影響下的轉彎半徑為
(3)
其中實際速度和實際轉彎坡度服從正態分布:
(4)
2.1.2 轉彎軌跡圓心計算
將實際圓心位置定義為O1(x1,y1),期望的圓心坐標為O(xs,ys),且在機動過程中只考慮轉彎過程中的影響,則實際圓心坐標為
(5)
式中:θ為飛機開始盤旋時的航向角。
2.1.3 空域半徑的計算
空中飛行的航空器不可避免地會受到風的影響,然而在進行航跡估計的過程中是無法確定風向的。因此,國際民航組織在航路劃設的過程中定義了一個對航空器最不利的風向——全向風,全向風為轉彎時垂直于飛機當前航向向外的風向。假設全向風的風速為w,則在全向風的影響下,實時轉彎半徑可以表示為
(6)
式中:a為飛機轉過的角度數。
因而最終所需的空域范圍半徑A為
A=x1+R1
(7)
2.2 飛行受限區的劃設
航空器在實際飛行中,往往需要進行多種科目的練習。為保證飛行安全,軍方飛行活動空域及其保護區內均無法通過民用航班,本文將此區域定義為飛行受限區,通常用二維區域來表示。
劃設飛行受限區主要是利用最小外接矩形法。利用面積較小的矩形不斷逼近軍方活動的空域,當矩形的邊與軍方活動空域相切時,形成的矩形為受軍事活動影響的空域(如圖3所示)。此方法首先需要確定軍方活動空域在坐標軸上的極值,即在x軸上的最大值xmax與最小值xmin,以及y軸上的最大值ymax與最小值ymin。四個點形成的區域為初始面積較小的空域:(xmin,ymin),(xmin,ymax),(xmax,ymin),(xmax,ymax)。將初始掃描線的角度設置為0,之后按照一定的增量dA增加,掃描線為兩組相互垂直的邊。將掃描線沿著目標矩形的邊界移動至與活動空域相切為止。此時形成的矩形為該掃描角度下的外接矩形。根據相關法規,軍方活動空域離航路航線需要保持10 km的水平間隔,因此將各掃描角度下面積最小的外接矩形增加安全間隔后定義為受軍方飛行活動影響的空域,即飛行受限區(如圖3陰影區所示)。

圖3 起始外接矩形及其掃描示意圖
利用外接矩形劃設飛行受限區的流程圖,如圖4所示。

圖4 飛行受限區劃設流程圖
3 終端區容量評估方法
軍事活動作為影響空域容量的因素之一,通過構建終端區容量評估模型,利用最大流最小割原理可以找出受軍事活動影響下的空域容量瓶頸,并利用改進的遺傳算法來對模型進行求解,以確定影響下的空域容量。
3.1 模型構建
3.1.1 假定條件
本文將終端區看作是一個網絡,其中的飛行受限區看作網絡中的多邊形區域(不能流過的區域),則利用最大流最小割理論就可以求取該終端區內的動態容量。在此模型中,假定:
(1) 航空器進離場均使用同一條跑道;
(2) 進離場航線中,每條航段的距離均已給定;
(3) 航空器在任一條航段上均以平均速度飛行;
(4) 在每條航段上只能單向飛行,且飛行方向已經給定;
(5) 對流天氣的影響區域為中間航段;
(6) 在終端區沒有等待區,所有航空器均是即到即走。
在這些假設成立前提下,終端區的容量就是指在單位時間內經過終端區入口點的最大航班量。
3.1.2 弧容量求解
為了計算終端區的動態容量,需要計算每段弧上所能容納航班的最大數,即該航段的容量。具體公式為
(8)
(9)
(10)
(11)

換算因子Kij為
(12)
對于換算因子Kij的計算,本文可根據高度和溫度求出,也可以通過查詢換算因數表就可以得知;如果給定的高度或者溫度沒有列出,可用內插法求其值。利用以上公式,就可以計算得出航段的容量,即網絡圖中的弧容量Cij(t)。
3.1.3 評估模型構建
在計算出終端區網絡示意圖中每條弧的弧容量后,將劃設的飛行受限區標記在網絡圖中,并以此構建在天氣影響下的終端區容量的動態評估模型。
將所需要的變量用以下符號表示:Bij(t)為t時刻下,航段Aij上的航班數;Iij(t)為(t,t+1)時段內,流入該航段Aij的航班數;Oij(t)為(t,t+1)時段內,流出該航段Aij的航班數;fij(t)為(t,t+1)時段內,該航段Aij凈流出量,即流量。Iij(t),Oij(t),fij(t)三者之間的關系為
fij(t)=Oij(t)-Iij(t)
(13)
本文用S表示該網絡的源,用T表示該網絡的匯,那么航段Aij在時段(t,t+1)內的凈輸出量為
(14)
而此規劃模型中的約束條件如下:
(1) 航段Aij上的容量約束:0≤fij(t) ≤Cij(t);
(2) 非負整數約束:Bij(t)≥0,fij(t)≥0。
在軍方活動過程中,航班不得經過劃定的飛行受限區。為了在該模型中將軍方活動的影響納入其中,假定如果某航段在飛行受限區內,那么該航段暫時不允許航空器通過。本文將軍事活動作為一個變量因子ζij(t)。
當ζij(t)=0時,說明該航段受到了軍事活動影響;
當ζij(t)=1時,說明該航段不受軍事活動影響。
本文將計算得到的網絡最大流maxv(f)對時間t進行求導得到最終的進場容量:
(15)
在計算出終端區的進場容量之后,還需要求出終端區的離場容量Cdep。同理,將跑道的離場端作為起點,終端區的出口點作為終點建立終端區離場網絡示意圖,之后參考進場容量的計算方法就可以得到離場容量Cdep。
通過式(15),就可以計算出該終端區的動態容量C:
C=Capp+Cdep
(16)
3.2 模型求解方法
求出終端區容量的關鍵是確定該網絡的最大流。根據最大流最小割定理,可以利用改進的遺傳算法進行求解。
3.2.1 傳統算法的分析比較
求解網絡最大流最小割問題其實是一類組合優化問題。目前比較常見的方法有Ford-Fulkerson標號算法[11]、預流推進類算法[12]等。Ford-Fulkerson是利用標號的方式來找尋增廣鏈路。通過不斷增加增值鏈上的流量到無增廣鏈為止。其算法的復雜度為O(nm2),由于受算法的限制,此算法不適用于大規模的編程。而預流推進算法則是在標號法的基礎上提出的改進算法,其復雜度為O(n2m)。可以看出,傳統方法隨著節點數目的增加,計算的復雜度會呈指數上升。為避免該問題,本文根據最大流最小割定理,結合遺傳原理,設計了求解最大流最小割問題的遺傳算法。
3.2.2 改進遺傳算法的設計求解
3.2.2.1 編碼與解碼方式

初始群體:隨機生成N個可行解作為初始群體。對于每個個體,進入點必須為1,終點必須為0,其余點為隨機生成的二進制代碼0或者1。
3.2.2.2 適應度函數
由于在求解終端區動態容量的過程中,需要找出網絡是最小割集容量。因此,將每個割集的容量作為適應度,即:
(17)
3.2.2.3 選擇算子
在群體中,每個個體都按照一定的概率進行交叉與變異,個體越接近最優解越容易被選擇。在動態容量求解的過程中,適應度值越小,越接近最優解。而遺傳算法求解中則是適應度值越大越容易被選擇,因此,在計算適應度以后需要對其進行歸一化處理。
將群體中適應度的最大值記為cmax,最小值為cmin。為結合實際情況,將個體的適應度函數更改為
(18)
3.2.2.4 交叉算子

(19)
如:(101001)?(110001)=(111001)。
3.2.2.5 變異操作
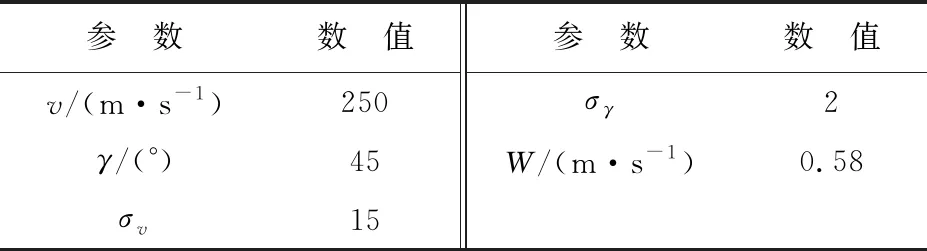
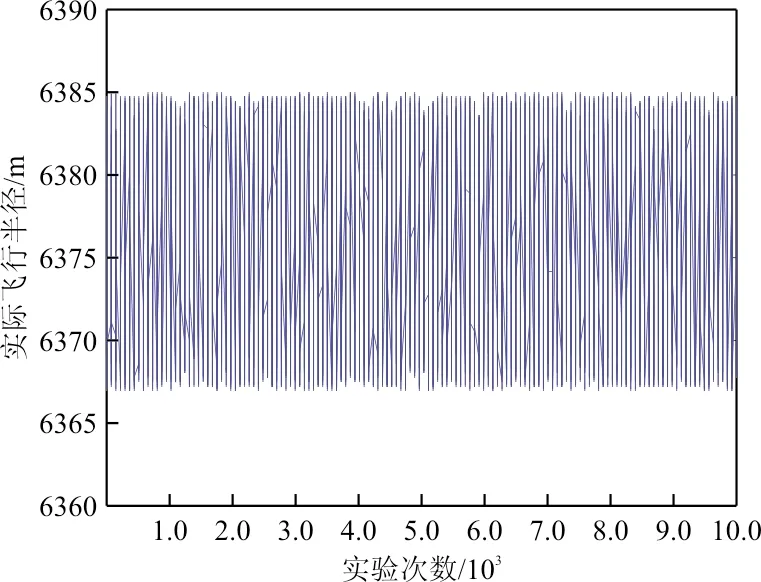
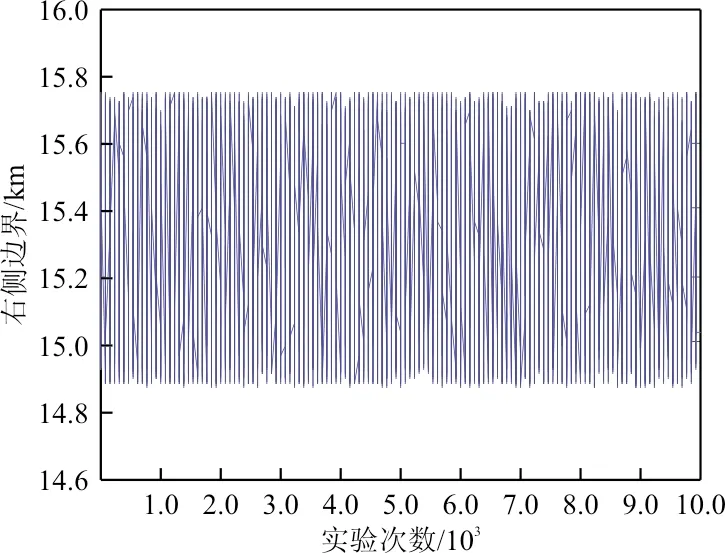
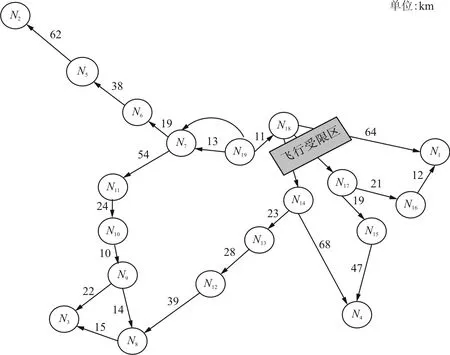
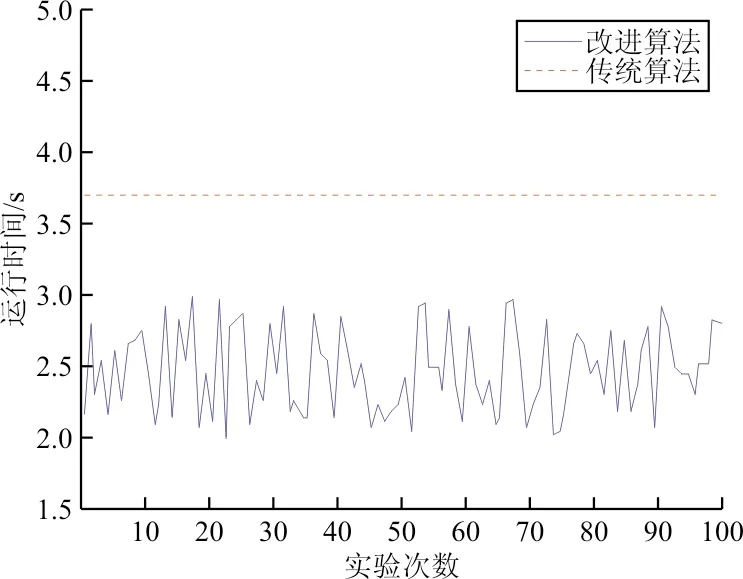
假定變異概率為Pm,對于每個新個體中的頂點(非進入點或者終點),隨機生成一個0~1之間的數字r,若r 3.2.2.6 算法步驟 Step1: 初始化種群,隨機生成N個可行解。 Step2: 分別計算每個可行解的適應度值,并作歸一化處理,選擇其中適應度值最佳的個體遺傳到下一代個體中。 Step3: 選擇相應的父本和母本,根據概率Pc的大小進行交叉操作,產生對應的個體。 Step4: 對產生的新個體進行變異操作,并作為下一代種群。 Step5: 重復Step3~Step4,直至下一代種群個體為N。 本文以某機場終端區為例,計算該機場某一時段的離場容量。假設軍方當天的訓練科目為盤旋機動和8字機動。采用蒙特卡羅法選取符合速度、坡度的概率密度函數分布的隨機數,進行n=1 000 000次的軍用航空飛行仿真,仿真計算的參數如表1所示。最終位置偏差結果如圖5~圖6所示,為方便顯示截取了前10 000次的仿真數據。 表1 仿真相關參數 圖5 實際圓心橫坐標位置圖 圖6 實際半徑圖 通過實例仿真發現,軍用航空飛機在作盤旋機動時,圓心最大的偏離距離在橫坐標上的投影為4.732 m,實際飛行過程中半徑最大為6 384.36 m,因此當飛行在作盤旋機動時,可以將其活動范圍劃定為半徑為7 km的圓形區域。 對于8字機動,本文假設飛機在做完轉彎機動后,平飛時間為8 min,在考慮全向風的情況下,通過對其動作的1 000 000次仿真,尋求其右邊界距離坐標原點的最大距離,結合飛行半徑的變化情況確定最終的空域范圍。通過對1 000 000次的數據分析,其邊界最遠距離為15.832 km,最大半徑為6.432 km,因此空域范圍為13 km×23 km的距形區域。飛行動作示意圖如圖7所示,前10 000次最右側的邊界偏差示意圖如圖8所示。 圖7 動作示意圖 圖8 右側邊界距離圖 利用最小外接距形法,將軍事活動的影響區域標記為飛行受限區,并將其影響范圍標記在離場圖上,該機場的離場的結束點為N1、N2、N3、N4;離場的開始點為N19;其余航路點均作為中間節點,建立受軍事活動影響的離場網絡示意圖,如圖9所示。 圖9 軍事活動影響下的網絡圖 假設該終端區上的機型比例大致為:重型機22.89%(其進近速度280 km/h);中型機76.89%(其進近速度為250 km/h);輕型機0.22%(其進近速度為215 km/h)。 根據示意圖本文可看到航段集合為 A={A197,A711,A1110,A109,A98,A93,A83,A1918,A1814,A1413,A1312,A128,A181,A1817,A1716,A1715,A154,A144,A76,A65,A52} 而各航段的長度(km)依次為 L={13,54,24,10,22,17,15,11,14,28,23,39,64,20,31,7,47,68,19,38,62} 相應的限制飛行高度(km)為 H={1.3,1.5,1.2,1.2,0.9,0.8,1.1,1.3,0.7,2.7,1.7,1.4,1.5,1.8,1.6,1.2,4.5,3.5,1.3,1.7,2.1} 根據溫度以及各航段的高度查詢換算因數表或利用內插法計算,本文可以得到速度的換算因子 K={1.087 6,1.104 6,1.072 3,1.081 6,1.041 7,1.032 6,1.051 2,1.032 9,1.103 6,0.987 6,1.172 4,1.083 2,1.095 2,1.114 6,1.091 2,1.071 6,1.291 7,1.224 5,1.071 8,1.097 2,1.132 5} 將上述各參數代入式(8)~式(12)中,求出每個航段的靜態容量。之后,利用改進的遺傳算法來求解網絡的最大流最小割容量。假定初始種群個體數為N=10,迭代代數為40,進行100次重復試驗,實驗結果如圖10所示。 圖10 實驗結果圖 利用改進遺傳算法可以求得在有軍事活動影響的情況下,該網絡的最大流最小割容量Cdep=14.5架次。利用文獻[12]中的最大流最小割算法對問題進行求解,得出的結果仍為Cdep=14.5架次。從圖10可以看出:在100次實驗中僅有2次實驗結果出現誤差,其他情況下均能夠得出正確結論。 而利用改進遺傳算法與傳統算法在運行時間上的對比情況如圖11所示。 圖11 運行時間對比圖 從圖11可以看出:相較于傳統最大流最小割算法,利用改進的遺傳算法不僅能較為準確地預測終端區容量,而且所需要的計算時間少于傳統算法,效率更高。利用傳統的數學分析法,主要利用固定方法求解數值,算法的復雜度會隨著節點的增多呈指數型增加;改進算法主要利用智能算法搜索尋優的能力,算法的運算效率主要和種群規模有關,而與節點數量關系不大,因此利用改進的遺傳算法求解終端區容量可以有效避免由于節點增多而引起的復雜度增長的局限性。終端區容量會由于軍事活動的影響而變化,及時地計算出終端區動態容量能夠使終端區運行更加高效合理。 (1) 本文提供了一種飛行受限區的劃設方法。通過構建相應的運動模型,利用蒙特卡羅法從定量的角度確定飛機的運動范圍,進而利用外接矩形法來確定最終的飛行受限區,為之后對軍事活動的研究提供了一種思路。 (2) 借鑒傳統算法中最大流最小割原理,利用改進遺傳算法進行求解,避免了傳統算法隨著節點增多計算復雜度呈指數上升的局限性,在保證準確性的同時,提高運算的效率。 (3) 在下一步的研究中,需要在保證有效性的同時,盡可能改進運算方法來進一步提高運算的效率。
4 算例仿真


5 結 論
猜你喜歡
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
中老年保健(2021年2期)2021-08-22 07:31:10
當代陜西(2021年2期)2021-03-29 07:41:24
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
海峽姐妹(2018年3期)2018-05-09 08:20:40
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00