滑流對渦槳飛機進氣道氣動性能影響的研究
2020-06-27 04:35:44王利敏張彥軍
航空工程進展 2020年3期
王利敏,張彥軍
(航空工業(yè)第一飛機設計研究院 總體氣動研究所, 西安 710089)
0 引 言
相對噴氣式發(fā)動機,渦輪螺旋槳發(fā)動機具有燃油經(jīng)濟性好及航線適應能力強的優(yōu)點[1],目前仍然是各種通用飛機與支線客機的主要動力裝置。渦槳發(fā)動機進氣道為發(fā)動機提供空氣的通道,進氣道設計的好壞直接影響到進入發(fā)動機氣流品質(zhì)的高低。由于進氣道是渦槳動力系統(tǒng)的一個重要組成部分,其設計技術(shù)受到了人們的廣泛重視。通常情況下,渦槳動力系統(tǒng)中的螺旋槳布置在進氣道前方很近的位置,而螺旋槳滑流又具有很強的非定常特性,所以螺旋槳滑流會對渦槳動力系統(tǒng)進氣道內(nèi)的流場品質(zhì)造成顯著影響。為了確保渦槳動力系統(tǒng)的進氣道流場品質(zhì)能夠滿足發(fā)動機的要求,有必要開展螺旋槳滑流對進氣道內(nèi)流場影響的研究[2]。
目前,螺旋槳滑流對飛機外部氣動特性影響的研究在國內(nèi)開展較多,包括帶滑流影響的飛機氣動力設計和計算方法,技術(shù)相對成熟,關(guān)于滑流影響的研究有:王傳斌[3]基于工程簡化方法螺旋槳滑流與飛機機翼,機身,平尾組合體之間的相互影響;陳榮錢等[4]建立了模擬滑流對短艙影響的高精度DES方法;王偉[5]計算了螺旋槳滑流對雙發(fā)渦槳整機氣動力的影響;徐家寬等[6]在此基礎(chǔ)上完成了考慮滑流影響的機翼氣動優(yōu)化。上述文獻均是關(guān)于滑流對外流場影響的研究,而對飛機內(nèi)流的影響以及考慮滑流進氣道設計方法的研究相對較少,陸浩[7]基于等效盤模型開展了螺旋槳滑流對渦槳發(fā)動機短艙/進氣道的影響;徐弘歷[8]初步采用了滑移網(wǎng)格方法開展了三葉螺旋槳對進氣道的影響研究。上述研究可以看出,由于使用了簡化的等效盤,或是相對簡單的模型和方法,難以全面反映滑流的作用,其結(jié)果的精度可信度相對較低,對實際工程應用參考意義不大。
本文以多軸式渦槳發(fā)動機進氣道為研究對象,開展螺旋槳滑流對渦槳飛機進氣道內(nèi)流場影響的數(shù)值模擬研究,對比有/無滑流構(gòu)型的進氣道內(nèi)流關(guān)鍵品質(zhì)參數(shù);為了盡可能準確模擬螺旋槳滑流對進氣道的影響,建立螺旋槳滑流外流場與進氣道內(nèi)流場耦合的非定常流場數(shù)值模擬方法,并檢驗其中螺旋槳滑流模擬方法的計算精度;利用該方法,研究三種典型飛行狀態(tài)下螺旋槳滑流對渦槳動力系統(tǒng)進氣道總壓恢復系數(shù)與總壓畸變指數(shù)的影響,并分析對應流動機理。
1 計算模型與數(shù)值模擬方法
1.1 計算模型
根據(jù)兩種不同的渦槳發(fā)動機類型(多軸式和單軸式),進氣道可分為環(huán)形進氣(單軸式)和短艙正下方進氣(多軸式)。AN-22渦槳軍用運輸飛機即采用了單軸式渦槳發(fā)動機進氣道(如圖1(a)所示);而Dash8-Q400渦槳支線客機則采用了多軸式渦槳發(fā)動機進氣道(如圖1(b)所示)。

(a) AN-22渦槳運輸機

(b) Dash8-Q400渦槳支線客機
本文的計算模型為某多軸式渦槳動力系統(tǒng),其進氣口位于短艙前部正下方(如圖2所示)。氣流經(jīng)過螺旋槳進入進氣道后被分成兩部分:一部分氣流向上偏轉(zhuǎn)進入發(fā)動機內(nèi)部,為發(fā)動機正常工作提供空氣;另一部分氣流通過旁通道直接向后下方排出,這種設計的主要目的是為了利用物體的慣性,將進入進氣道的氣流中可能攜帶的沙石或者冰片等外來物在進入發(fā)動機前分離到機體外,避免外來物對發(fā)動機造成損害。
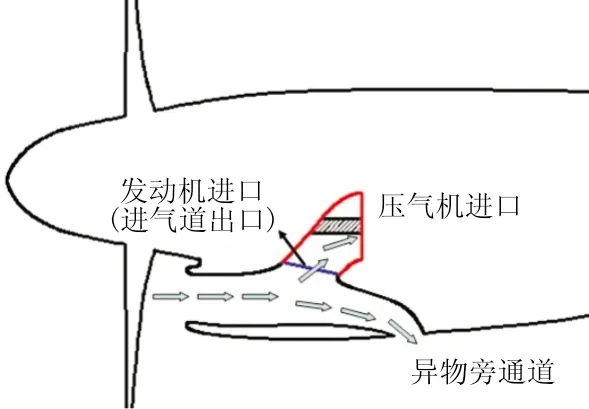
圖2 計算模型二維示意圖
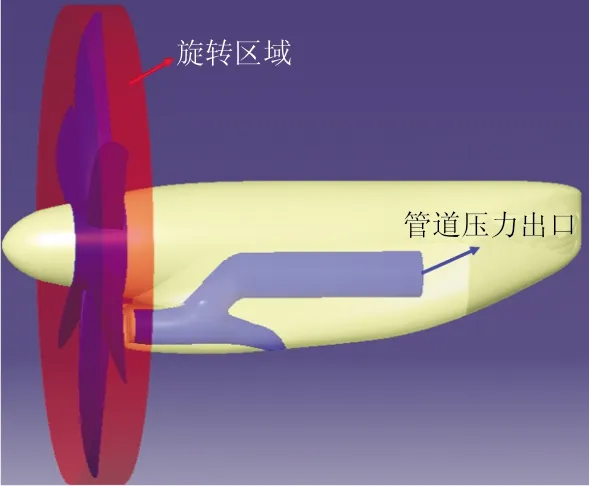
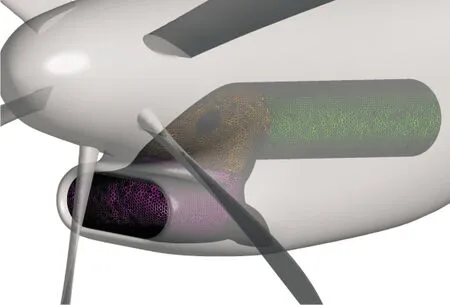
該渦槳發(fā)動機配有六葉螺旋槳,螺旋槳旋轉(zhuǎn)方向為右旋(飛行員視角)。該渦槳動力裝置計算模型的整體外觀與其內(nèi)部管道幾何形態(tài)如圖3所示。

圖3 三維計算模型示意圖
1.2 數(shù)值模擬方法
對于有滑流流場的數(shù)值模擬方法,通常可分為定常與非定常兩大類。定常方法并不直接模擬螺旋槳的轉(zhuǎn)動過程,計算周期短,某些精度較高的方法甚至能部分模擬出螺旋槳滑流尾跡的整體旋轉(zhuǎn)形態(tài),當然這種尾跡在流場中是固定的。典型的滑流定常模擬方法包括帶旋轉(zhuǎn)效應的激勵盤方法[7]與多重參考坐標系方法[9-10]。非定常方法直接模擬螺旋槳的旋轉(zhuǎn)過程,能捕捉到滑流尾跡的強度、形態(tài)、位置在流場中隨時間變化的情況,所以計算精度高,但計算周期也特別長。典型的滑流非定常模擬方法包括滑移網(wǎng)格方法[11]與嵌套網(wǎng)格[12-13]方法。
對于本文所研究的問題,定常數(shù)值模擬方法不能模擬出槳葉掠過進氣道前方過程中進氣道內(nèi)流場品質(zhì)的實時變化情況,所以必須采用非定常方法。為此,采用具備滑流非定常模擬能力的商業(yè)軟件CFX進行流場模擬。具體模擬策略如下:將計算域分為如圖4所示的靜止與旋轉(zhuǎn)域兩個區(qū)域,包裹著螺旋槳的圓盤區(qū)域即為旋轉(zhuǎn)域,旋轉(zhuǎn)域之外的區(qū)域即為靜止域。模擬過程中旋轉(zhuǎn)域中的物面按照螺旋槳的轉(zhuǎn)速進行旋轉(zhuǎn),靜止域與旋轉(zhuǎn)域之間在交界面處利用CFX提供的滑移網(wǎng)格技術(shù)實現(xiàn)相對運動并進行流場信息交換。在計算域中CFX通過求解非定常雷諾平均N-S方程實現(xiàn)對流場的非定常模擬,湍流模型選用兩方程的k-ωSST模型。方程的對流項與湍流項選用CFX獨特的High Resolution格式進行離散,這是一種改進過的迎風格式,可根據(jù)當?shù)亓鲌鲇嬎愕膶嶋H情況在一階與二階迎風格式之間連續(xù)變換格式的精度[14]。方程中的瞬態(tài)項采用隱式歐拉二階向后差分格式。在本文所開展的所有非定常模擬中,物理時間步長均采用螺旋槳轉(zhuǎn)過1°所需的時間,在每個瞬態(tài)物理時刻均迭代10步,以保證充分收斂。
計算域的邊界條件設置如下:遠場四周采用壓力遠場邊界條件,遠場進口面采用速度進口邊界條件,遠場出口面采用壓力出口邊界條件。短艙內(nèi)部管道的末端出口處采用壓力出口邊界條件以模擬發(fā)動機進口條件,短艙壁面和進氣道壁面均采用無滑移壁面,螺旋槳槳葉與輪轂為旋轉(zhuǎn)壁面。

(a) 遠場
(b) 發(fā)動機
整個計算域采用非結(jié)構(gòu)網(wǎng)格進行空間離散,旋轉(zhuǎn)域與靜止域網(wǎng)格分開生成,兩個域在交界面處的網(wǎng)格采用面搭接的方式連接。為了較為精確地模擬螺旋槳滑流流場,由于旋轉(zhuǎn)域的網(wǎng)格密度較大,并且均勻過渡到了遠場和管道內(nèi)流區(qū)域,將流場中所有物面處附面層的第一層網(wǎng)格高度均設置為螺旋槳槳葉70%半徑處弦長的10-5倍,第一層網(wǎng)格之外的網(wǎng)格高度按1.2倍的比率逐漸增長,附面層網(wǎng)格層數(shù)為30層。本文計算的幾個螺旋槳+發(fā)動機短艙構(gòu)型的全流場網(wǎng)格單元數(shù)在1 980萬~2 000萬之間。導致不同構(gòu)型網(wǎng)格單元數(shù)的存在微小差異主要原因是:不同狀態(tài)下螺旋槳的槳葉角不同,槳葉附面層網(wǎng)格與旋轉(zhuǎn)域邊界之間的非結(jié)構(gòu)網(wǎng)格的數(shù)量會發(fā)生微小變化。作為對比,本文還計算了不帶螺旋槳的發(fā)動機短艙構(gòu)型的流場,該構(gòu)型的全流場網(wǎng)格單元數(shù)為1 400萬。一個帶螺旋槳的計算模型的表面網(wǎng)格以及短艙內(nèi)部管道的表面網(wǎng)格如圖5所示。
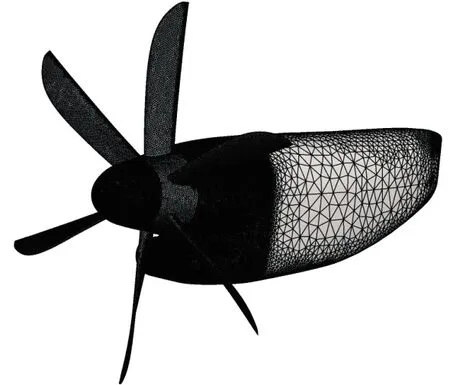
(a) 螺旋槳與短艙外表面
(b) 短艙內(nèi)部管道
2 滑流數(shù)值模擬方法可靠性檢驗
為了檢驗本文所采用的基于商業(yè)軟件CFX的滑流非定常模擬方法的可靠性,采用該方法對圖3中的單獨螺旋槳進行了實驗狀態(tài)下的流場數(shù)值模擬。計算模型的表面網(wǎng)格如圖6所示,全流場網(wǎng)格單元數(shù)為550萬。實驗工況為:海拔7 000 m高度標準大氣,自由來流馬赫數(shù)0.53,槳葉角48.42°,螺旋槳轉(zhuǎn)速850 rpm。
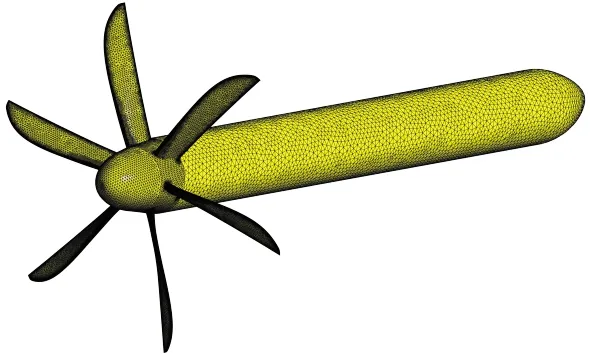
圖6 單槳計算模型表面網(wǎng)格
計算狀態(tài)下CFD模擬得到的螺旋槳拉力、功率與實驗值的結(jié)果對比如表1所示,可以看出:本文所采用的基于CFX的螺旋槳滑流非定常模擬方法能較為準確地預測出了螺旋槳的拉力與功率(實際反應了扭矩值),拉力誤差為2.1%,功率誤差為1.8%。
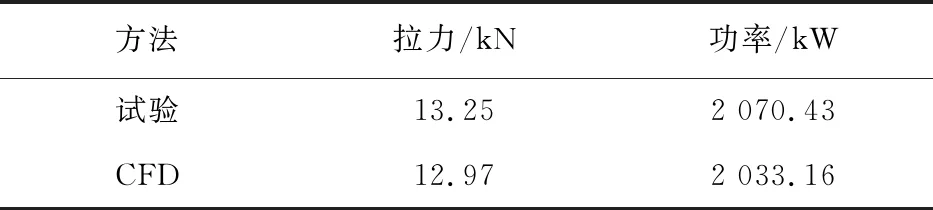
表1 單獨螺旋槳模擬結(jié)果與實驗結(jié)果對比
模擬得到的單槳槳尖渦等渦量面示意圖如圖7所示,可以看出:本文所采用的模擬方法很好地捕捉到了在流場中呈螺旋狀分布的槳尖渦,基于CFX的螺旋槳滑流非定常模擬方法計算精度較高,能夠滿足本文研究工作的要求。
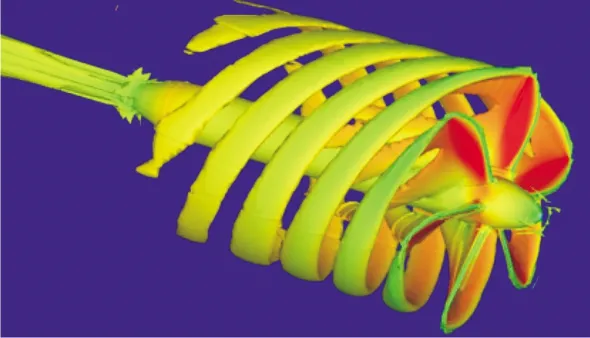
圖7 數(shù)值模擬得到的單槳槳尖渦等渦量面
3 進氣道關(guān)鍵性能參數(shù)與數(shù)據(jù)處理方法
渦槳發(fā)動機進氣道氣動性能指標主要包括進氣道出口總壓恢復系數(shù)σ與總壓畸變指數(shù)D1。
3.1 總壓恢復系數(shù)
總壓恢復系數(shù)的定義為:進氣道出口平均總壓與自由來流總壓之比,以σ表示。
式中:Pt1為進氣道出口平均總壓;Pt2為自由來流總壓。
3.2 總壓畸變指數(shù)
總壓畸變指數(shù)D1是用來評估進氣道出口截面處氣流均勻度的主要參數(shù),多用于渦槳發(fā)動機對進氣道評估。其計算公式為
式中:Ptmax為進氣道出口處最大總壓值;Ptmin為進氣道出口處最小總壓值。
在本文中,Ptmax和Ptmax通過對進氣道出口面分布的43個總壓監(jiān)測點(發(fā)動機要求的總壓監(jiān)測點分布)的總壓值對比得到。進氣道出口43個總壓監(jiān)測點的分布圖如圖8所示。
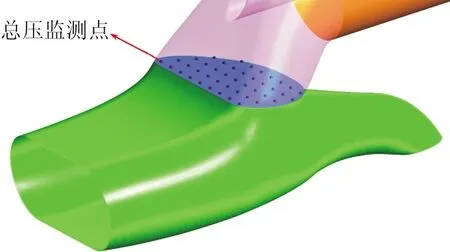
圖8 進氣道出口平面上43個總壓監(jiān)測點分布圖
3.3 非定常數(shù)據(jù)處理方法
本文對有滑流構(gòu)型采用了非定常數(shù)值模擬方法,并且螺旋槳會周期性的在進氣道入口前方掠過,所以模擬過程中帶滑流構(gòu)型的進氣道總壓恢復系數(shù)與總壓畸變指數(shù)會一直變化。也正是因為螺旋槳槳葉是周期性的在進氣道入口前方掠過,所以在非定常模擬收斂后,帶滑流構(gòu)型的進氣道總壓恢復系數(shù)與總壓畸變指數(shù)也會隨著模擬時間的推進而呈現(xiàn)周期性變化。為此,對于有滑流構(gòu)型的進氣道總壓恢復系數(shù)與總壓畸變指數(shù)取其非定常模擬收斂后周期性波動的均值。
4 計算結(jié)果及分析
為了較為全面地分析螺旋槳滑流對渦槳動力系統(tǒng)進氣道氣動性能的影響,選取了地面、起飛以及巡航三個典型狀態(tài)進行研究。三個計算狀態(tài)的工況與動力狀態(tài)參數(shù)如表2所示。
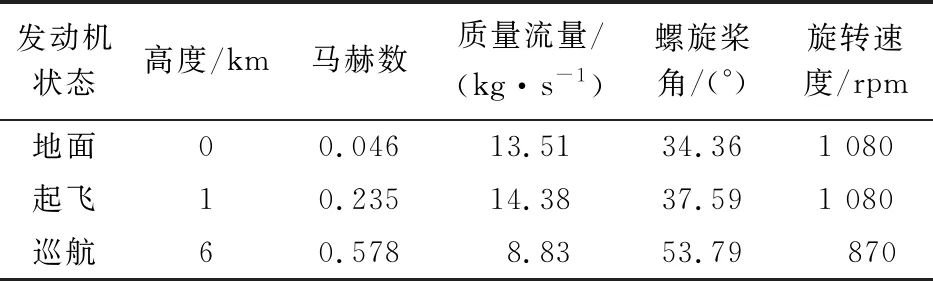
表2 計算狀態(tài)的工況與動力狀態(tài)參數(shù)
4.1 地面狀態(tài)
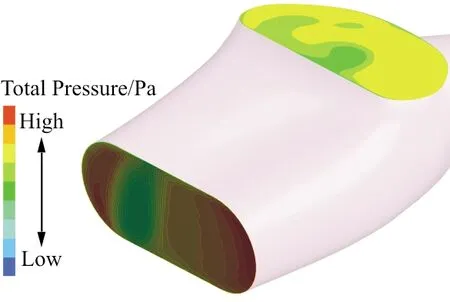
地面狀態(tài)下有/無滑流構(gòu)型的進氣道性能計算結(jié)果對比如表3所示,有/無滑流構(gòu)型進氣道入口與出口的總壓分布云圖如圖9所示,其中圖9(b)中有滑流構(gòu)型的總壓云圖對應螺旋槳相對于進氣道所處的位置如圖10所示。
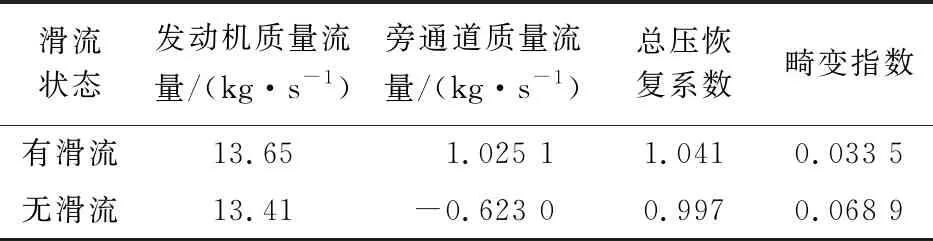
表3 地面狀態(tài)計算結(jié)果
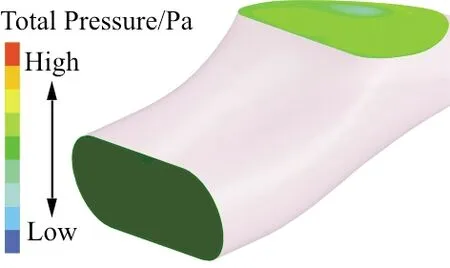
(a) 無滑流

(b) 有滑流
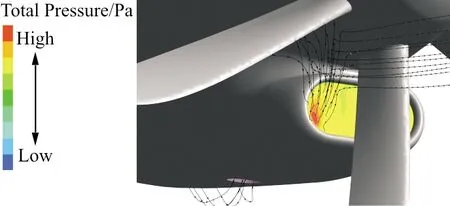
圖10 地面狀態(tài)下有滑流構(gòu)型某時刻的空間流線
從表3和圖9可以看出:
(1) 在地面狀態(tài),滑流帶來的進氣道性能改變非常顯著;相比無滑流構(gòu)型結(jié)果,有滑流構(gòu)型的進氣道總壓恢復系數(shù)增加,總壓畸變降低。
(2) 從進氣道入口與出口處的總壓云圖可以看出,因螺旋槳處于大拉力狀態(tài),螺旋槳對氣流做功效應明顯,所以有滑流構(gòu)型進氣道入口處的總壓顯著大于無滑流構(gòu)型。相應地,在進氣道出口處,有滑流構(gòu)型的總壓也大于無滑流構(gòu)型,這是有滑流構(gòu)型總壓恢復系數(shù)大于無滑流構(gòu)型的根本原因。還可以看出,有滑流構(gòu)型進氣道入口處總壓分布很不均勻,其原因在于此時刻剛好有一小股氣流被一片螺旋槳槳葉“壓入”了進氣道(如圖10所示)。但是因為螺旋槳轉(zhuǎn)速很高,所以圖9(b)中進氣道入口處總壓高的區(qū)域也會很快、均勻且周期性地出現(xiàn)在進氣道入口平面的其他位置,并且這些高低壓區(qū)域的氣流在從進氣道入口流向出口的過程中還會發(fā)生摻混。因此,有滑流構(gòu)型進氣道出口處的總壓分布相對于入口處要均勻得多。
(3) 在地面狀態(tài),由于滑流效應,旁通道出口處的氣流速度、壓力都發(fā)生變化。因此,旁通道內(nèi)部氣流的流態(tài)也隨之發(fā)生改變,流量從“倒吸”改為順暢排出。這也是進氣道總壓畸變降低的主要原因。無滑流時,旁通道出口靜壓比進氣道出口靜壓高,出現(xiàn)反吸現(xiàn)象,將低能氣流從旁通道反吸入進氣道內(nèi),使進氣道出口處的總壓畸變增高,降低了氣流的品質(zhì),而有滑流之后,氣流從旁通道順暢排出,無低能氣流影響,因此進氣道出口的總壓畸變降低。
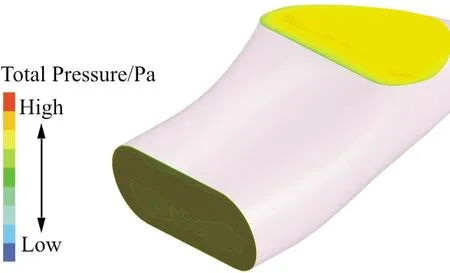
無滑流構(gòu)型地面狀態(tài)下氣流經(jīng)旁通道流入發(fā)動機進氣道的情形如圖11所示,可以看出:氣流從旁通道流入進氣道的過程中發(fā)生了分離,導致進氣道出口面存在小區(qū)域的低壓區(qū)。正是這一現(xiàn)象導致了無滑流構(gòu)型進氣道出口處的總壓畸變高于有滑流構(gòu)型。地面狀態(tài)下無滑流構(gòu)型旁通道的這種“倒吸”現(xiàn)象不僅會降低流入發(fā)動機氣流的品質(zhì),還會增加發(fā)動機吸入異物的風險。
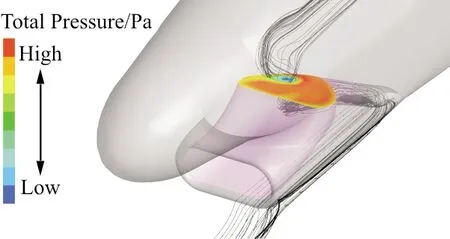
圖11 無滑流構(gòu)型地面狀態(tài)下氣流經(jīng)旁通道流入發(fā)動機進氣道的情形
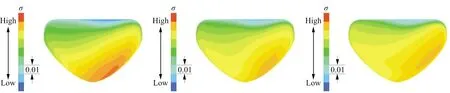
本文計算的渦槳發(fā)動機模型配有六葉螺旋槳,因此每轉(zhuǎn)過60°流場會出現(xiàn)一次周期性的變化。地面狀態(tài)下帶滑流構(gòu)型進氣道出口平面總壓恢復系數(shù)云圖隨螺旋槳相位角θ的變化情況如圖12所示,可以看出:在螺旋槳轉(zhuǎn)過60°相位角的過程中,進氣道出口平面上的總壓恢復情況變化顯著;高總壓恢復區(qū)的位置隨螺旋槳相位角變化而明顯變化,而低總壓恢復區(qū)的位置則基本不隨螺旋槳相位角的變化而明顯移動,基本維持在進氣道出口平面的右上角。
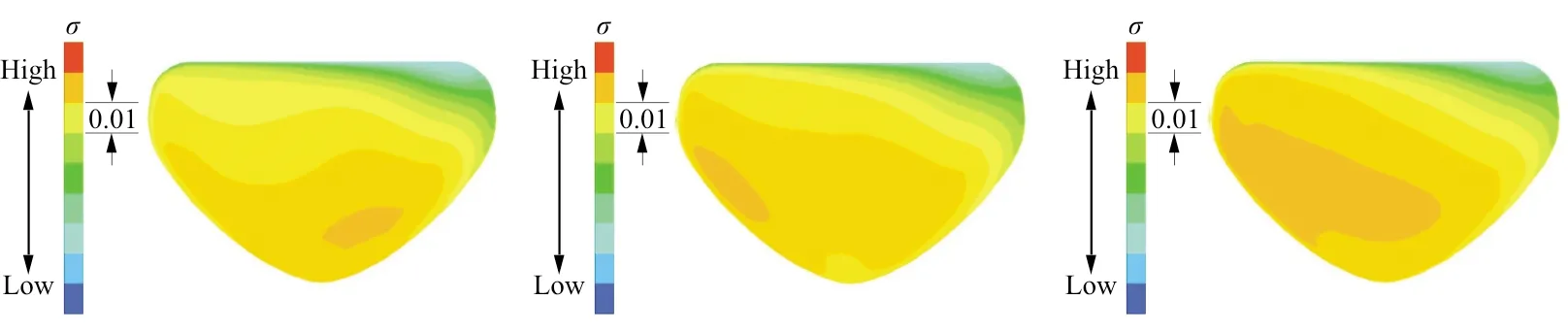
(a)θ=0° (b)θ=10° (c)θ=20°
(d)θ=30° (e)θ=40° (f)θ=50°
圖12 地面狀態(tài)下進氣道出口平面總壓恢復系數(shù)云圖隨螺旋槳相位角的變化
Fig.12 The variation of the total pressure recovery coefficient at the inlet plane with the phase angle of the propeller
4.2 起飛狀態(tài)
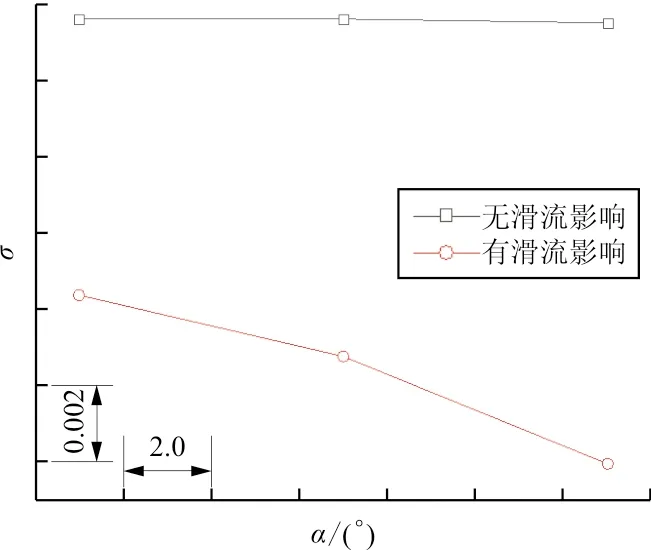
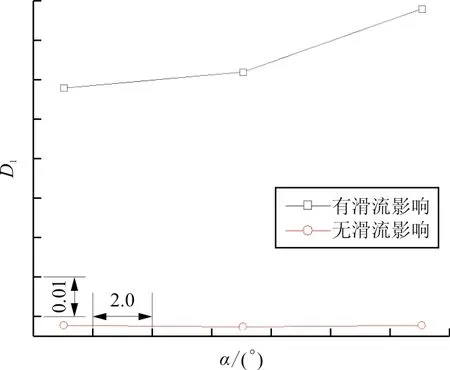
起飛狀態(tài)下有/無滑流構(gòu)型進氣道的總壓畸變指數(shù)與總壓恢復系數(shù)隨迎角α的變化趨勢對比如圖13所示;迎角為0°時有/無滑流構(gòu)型進氣道入口與出口處的總壓云圖如圖14所示。

(a) 總壓恢復系數(shù)
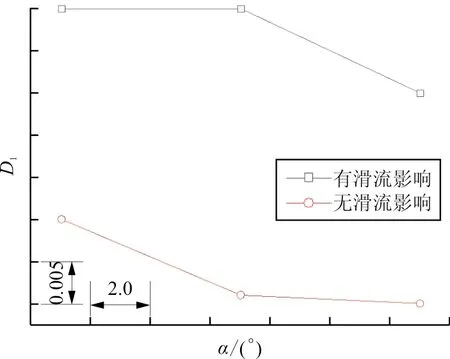
(b) 總壓畸變指數(shù)
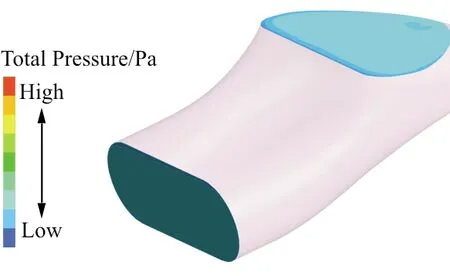
(a) 無滑流構(gòu)型
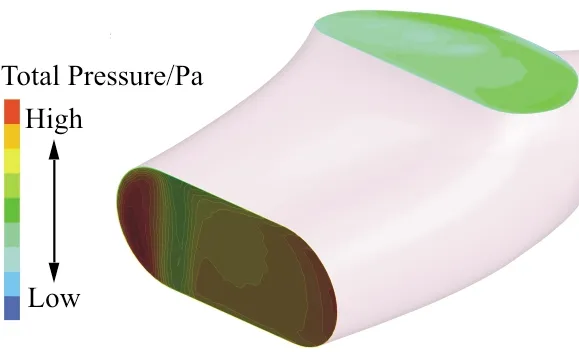
(b) 有滑流構(gòu)型
從圖13~圖14可以看出:
(1) 起飛狀態(tài)下滑流對進氣道流場品質(zhì)的影響也很顯著。在所計算的迎角下,有滑流構(gòu)型進氣道總壓恢復系數(shù)比無滑流有所增高。導致這種現(xiàn)象的主要原因在于起飛狀態(tài)下發(fā)動機仍然處于大功率工作狀態(tài),螺旋槳對氣流做功導致氣流總壓明顯增加。因此,進氣道出口總壓恢復系數(shù)明顯升高,這一現(xiàn)象及其機理與地面狀態(tài)的情況相似。
(2) 與地面狀態(tài)不同的是,起飛狀態(tài)下有滑流構(gòu)型進氣道的流場畸變指數(shù)明顯高于無滑流構(gòu)型。在所計算的迎角下,有滑流構(gòu)型進氣道出口截面畸變指數(shù)比無滑流構(gòu)型有所增加。無滑流構(gòu)型,進氣道內(nèi)部流場分布均勻;有滑流構(gòu)型,螺旋槳槳葉在進氣道前方周期性地掠過會降低進氣道入口處的總壓分布均勻度,雖然在流過進氣道時因為強烈的摻混作用這種不均勻度會顯著降低,但也難以完全降低到受螺旋槳干擾前的水平。因此,起飛狀態(tài)下有滑流構(gòu)型的進氣道總壓畸變指數(shù)要高于無滑流構(gòu)型。
(3) 起飛狀態(tài)下,迎角變化對有滑流與無滑流構(gòu)型進氣道流場品質(zhì)的影響趨勢存在一定差異:在小迎角下,有滑流構(gòu)型的總壓恢復系數(shù)基本不隨迎角改變,而無滑流構(gòu)型的總壓恢復系數(shù)則隨迎角增加而減小;在大迎角下,有滑流構(gòu)型的總壓恢復系數(shù)隨迎角增加而減小,而無滑流構(gòu)型的總壓恢復系數(shù)則基本不隨迎角變化。
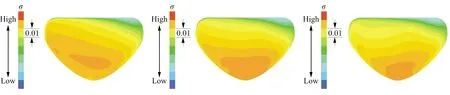
起飛狀態(tài)下有滑流構(gòu)型進氣道出口平面總壓恢復系數(shù)云圖隨螺旋槳相位角θ的變化情況如圖15所示。
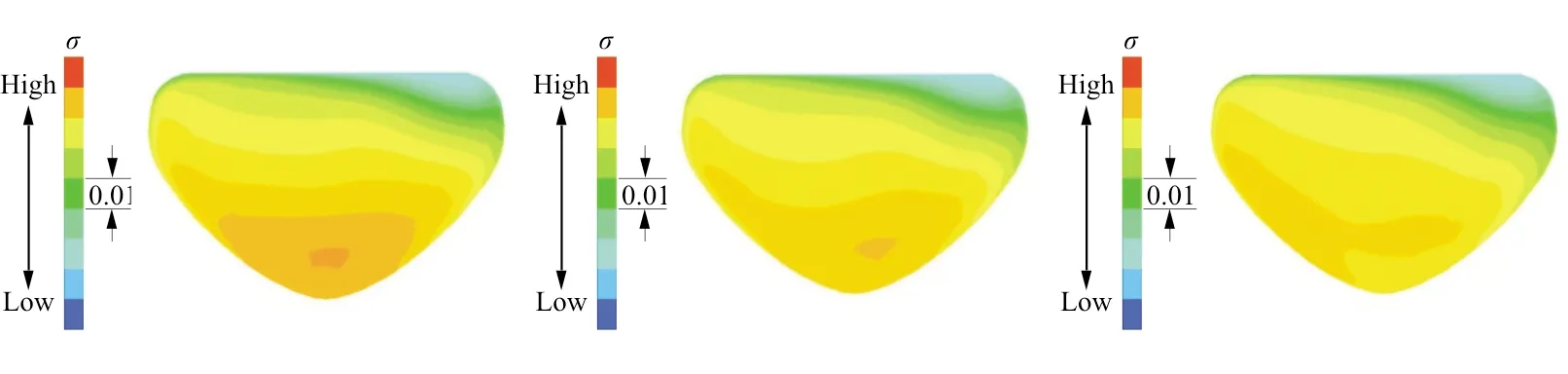
(a)θ=0° (b)θ=10° (c)θ=20°
(d)θ=30° (e)θ=40° (f)θ=50°
圖15 起飛狀態(tài)下0°迎角時進氣道出口平面總壓恢復系數(shù)云圖隨螺旋槳相位角的變化
Fig.15 The variation of the total pressure recovery coefficient of the inlet with the phase angle of the propeller at 0°
從圖15可以看出:在一個周期內(nèi),進氣道出口平面上的總壓恢復情況變化顯著,高總壓恢復系數(shù)區(qū)域的位置隨螺旋槳相位角變化而明顯變化,而低總壓恢復系數(shù)區(qū)的位置則不隨螺旋槳相位角的變化而明顯移動,基本維持在進氣道出口平面的右上角,這一現(xiàn)象與地面狀態(tài)是一致的。
4.3 巡航狀態(tài)
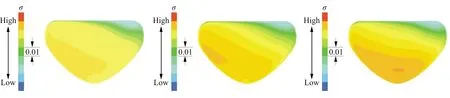
巡航狀態(tài)下有滑流與無滑流構(gòu)型進氣道總壓恢復系數(shù)與流場畸變指數(shù)隨迎角α的變化趨勢對比如圖16所示;巡航狀態(tài)有滑流與無滑流構(gòu)型進氣道入口與出口平面處的總壓云圖如圖17所示。
(a) 總壓恢復系數(shù)
(b) 總壓畸變指數(shù)
(a) 無滑流構(gòu)型
(b) 有滑流構(gòu)型
從圖16~圖17可以看出:
(1) 巡航狀態(tài)下滑流對進氣道的總壓恢復系數(shù)與流場畸變指數(shù)均造成不利影響。在所計算的迎角范圍內(nèi),有滑流構(gòu)型進氣道出口截面的總壓恢復系數(shù)比無滑流構(gòu)型有所降低;有滑流構(gòu)型進氣道出口截面的畸變指數(shù)比無滑流構(gòu)型卻有所增加。造成這種現(xiàn)象的原因分析如下:巡航狀態(tài)下,發(fā)動機處于小拉力工作狀態(tài),螺旋槳對氣流做功相對較少,并且螺旋槳上的拉力主要是徑向比較靠外的槳葉部分產(chǎn)生的,徑向靠內(nèi)的槳葉部分基本不產(chǎn)生拉力,即徑向比較靠內(nèi)的槳葉部分對氣流做功很少;但其尾跡還會摻混進入其后方的氣流中,造成附近氣流總壓降低,這股總壓相對較低的氣流進入進氣道后一方面會降低進氣道氣流的總壓值,同時也會增加進氣道內(nèi)氣流的不均勻度。
(2) 在巡航狀態(tài),有滑流構(gòu)型與無滑流構(gòu)型進氣道總壓恢復系數(shù)與總壓畸變指數(shù)隨迎角的變化趨勢存在差異。在所計算的迎角范圍內(nèi),無滑流構(gòu)型的總壓恢復系數(shù)與總壓畸變指數(shù)均基本不隨迎角變化。而有滑流構(gòu)型的總壓恢復系數(shù)則隨著迎角增加而減小,總壓畸變指數(shù)則隨著迎角增加而增加。
巡航狀態(tài)下0°迎角時進氣道出口總壓恢復系數(shù)云圖隨螺旋槳相位角θ的變化情況如圖18所示。
(a)θ=0° (b)θ=10° (c)θ=20°

(d)θ=30° (e)θ=40° (f)θ=50°
圖18 巡航狀態(tài)下0°迎角時進氣道出口平面總壓恢復系數(shù)云圖隨螺旋槳相位角的變化
Fig.18 The variation of the total pressure recovery coefficient of the inlet with the phase angle of the propeller at 0° of attack
與地面狀態(tài)(圖12)和起飛狀態(tài)(圖15)的計算結(jié)果相比,巡航狀態(tài)下進氣道出口面上的總壓恢復系數(shù)云圖隨螺旋槳相位角的變化呈現(xiàn)如下特點:首先高總壓恢復系數(shù)區(qū)的位置變化范圍沒有地面狀態(tài)與起飛狀態(tài)那么大,基本維持在該平面的右方與右下方;其次,低總壓恢復系數(shù)區(qū)的位置雖然也基本不隨螺旋槳相位角改變而發(fā)生顯著變化,但其相對于地面與起飛機狀態(tài)來說位置向左側(cè)移動了;最后,整個進氣道出口平面上總壓恢復系數(shù)的最大值與最小值在螺旋槳轉(zhuǎn)過60°相位角的過程中變化幅度明顯要大于地面狀態(tài)與起飛狀態(tài)。再次證明了巡航狀態(tài)下螺旋槳滑流對進氣道流場品質(zhì)造成的不利影響是最顯著的。
5 結(jié) 論
(1) 地面與起飛狀態(tài)下螺旋槳滑流能夠提高進氣道總壓恢復系數(shù);但在巡航狀態(tài)下,螺旋槳滑流會降低進氣道的總壓恢復系數(shù)。
(2) 螺旋槳滑流會增加進氣道流場的總壓畸變指數(shù)。
(3) 在起飛與巡航狀態(tài)下,無滑流構(gòu)型的進氣道性能隨迎角變化的情況不如有滑流構(gòu)型明顯。總體上,有滑流構(gòu)型的總壓恢復系數(shù)隨迎角增加而減小,而總壓畸變指數(shù)則隨著迎角增加而增加,即迎角增加對有滑流構(gòu)型的進氣道性能會造成不利影響。