空中加受油安全對接控制驗證要素分析
2020-06-27 04:35:46王釗樊鵬王福新車海林
航空工程進展 2020年3期
王釗,樊鵬,王福新,車海林
(1.上海交通大學 航空航天學院, 上海 200240)(2.航空工業第一飛機設計研究院 總體氣動研究所, 西安 710089)(3.中國飛行試驗研究院 信息化與檔案中心, 西安 710089)
0 引 言
在空中加油過程中,加、受油機快速、安全的對接,是完成加油任務的最直接衡量標準。特別是多機、大型加油機對不同種類的受油機對接過程的復雜環境變化,加受油機編隊的進近、進入和退出的流程,加油機和受油機隨著加油和受油油量變化引起的飛機姿態的變化,而帶來的飛機隨迎角、速度、高度等操縱控制,均對加、受油任務的成功率和安全性具有嚴重影響。
現有的相關研究大多關注的是空中加受油對接過程中,加油機產生的或尾渦[1-2]、或翼尖渦[3]、或下洗流[4]單獨對后部受油機產生的擾動影響,或是受油機前方氣流擾動的形成機理[4],或是加/受油過程中的加油軟管和錐套在空中的運動過程[5],或是通過設計程序及環境仿真對加受油機能否實現精確對接控制的驗證[6-8]。相關學者用數學模型說明了飛機尾部流場對后部受油機產生影響[1-4],但對其影響產生的原因沒有進行詳細分析。王鵬等[5]僅對加油機尾流場對受油機產生干擾的機理進行了總結研究;張穎等[6]通過數學模型與數字仿真對設計的受油機對接控制系統驗證其能夠實現受油插頭與加油錐套進行精確跟蹤及對接;劉曌等[7]提出基于參考觀測器的全狀態反饋控制方法設計了受油機的飛行控制系統,通過仿真驗證加油錐套在假定強度的陣風干擾下,控制器能夠使加油錐套與受油插頭進行精跟蹤對接。但并沒有相關文獻通過研究受油機動態進近軟式加油機全過程中,從宏觀上提出并總結對影響加受油機對接安全控制的所有潛在驗證要素且對其進行較詳細分析。
本文依據大型加油機(軟式)特殊布局和空中加受油編隊典型體系,對空中加受油安全對接控制驗證要素進行總結分析,以期得到對接速度對錐套運動的影響規律,為軟式空中加油的對接速度選取提供依據。
1 空中加受油(軟式)編隊
1.1 空中加受油編隊分類
空中加油/受油編隊程序按作戰任務類型可分為戰術編隊和戰略編隊[9];按加油機數量可分為單架加油機編隊和多架加油機編隊;按受油方式編隊可分為軟式加油編隊,硬式加油編隊和硬管錐套適配器編隊;按受油機機型編隊可分為重型受油機編隊和戰斗類,輕型受油機編隊;按編隊布局形式可分為密集型編隊和標準型編隊。
1.2 空中加受油編隊程序
空中加受油正常對接程序分為預對接、接近、對接。
預對接位置是加油裝置伸出后(軟管錐套后或硬管后)的一個穩定位置。受油機從加油機左側觀察位置移到錐套之后(低于錐套)約15~30 m處加油等待區域,保持穩定姿態后以0.6~3.0 m/s的追趕速度(即速度差)推進,在錐套后約1.5~8.0 m處(根據受油機類型不同,預對接位置在加油裝置伸出后約1.5~8.0 m變化),受油機保持在穩定的預對接位置。
當受油機保持穩定后(加油控制員通知可以安全對接時),即可開始接近并不斷靠近錐套,根據國外軟式加油機的加油經驗統計,受油機必須以設定的逼近速率約1.0~1.5 m/s向前移動進入對接區域,進行對接。
一旦受油機與軟管-錐套對接成功,為使燃油順利流動,軟管必須被推進約至少1.5 m,達到規定的最佳輸油區域內,此時相應的指示燈開啟,對接成功,如圖1所示。
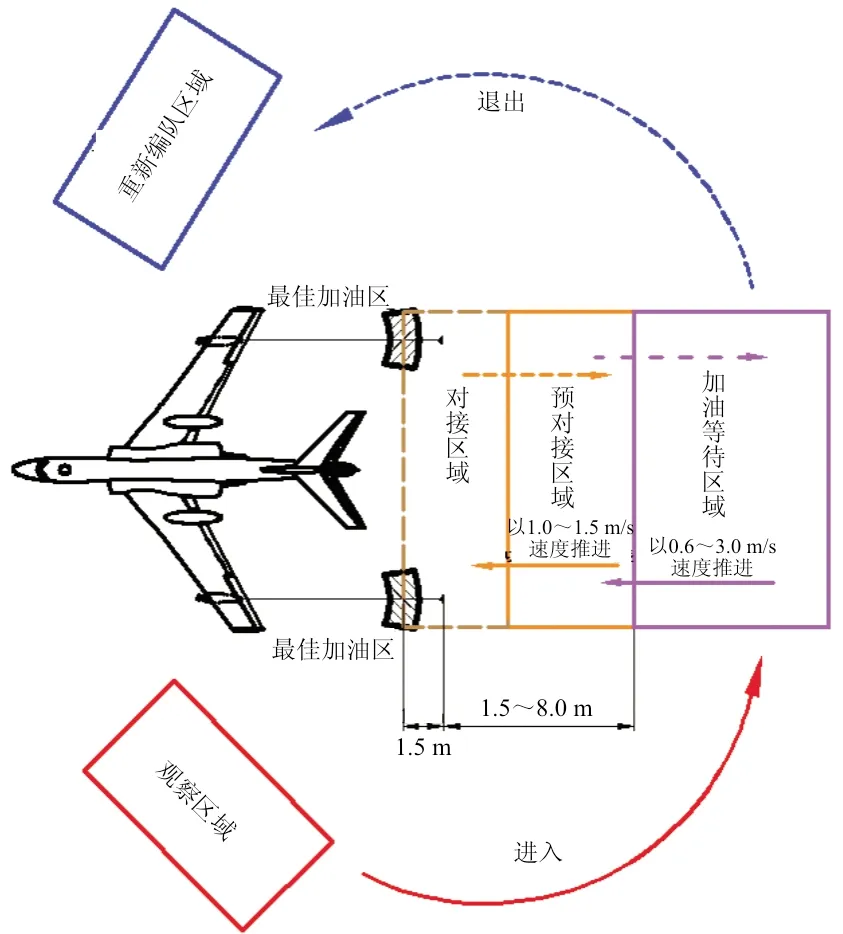
圖1 軟式加油對接程序
2 空中加受油安全對接控制驗證要素
2.1 空中加受油編隊、加油空域確定及加油包線匹配驗證
由于大型空中加油機(機翼掛裝兩具吊艙和機身下加裝一具中心線加油平臺)設計,如圖2所示[8]。單機加油(機翼單側、中線加油平臺)、雙機加油(機翼單側、中心線加油平臺雙機或機翼兩側)和三機同時加油任務需求的確定,需要通過空域的數學模型進行驗證,建立加、受油機相對運動的協調性,編隊的進入、退出信息和加油流程等。執行加/受油任務時,按照既定的空中加油任務規劃和調度、加油航跡的任務分配,實施空中加油任務。不同受油機機型、裝載構型有不同的加油狀態、加油包線、高度分層,滿足加/受油機機型的最優匹配高度、速度。每一個機型都應制定適合本機型的空中加油規程和程序,同時根據空中加油環境確定空中加油空域。空中加油飛行軌跡最常用的是跑道式,空域大時可用直線式,空域小時可用盤旋式。不論采用何種方式,皆要以空域安全為首要保障。
加油機和受油機在飛行包線上有充分重疊是進行空中加油的最基本必要前提,給加油機分配的飛行包線必須與受油機所期望的空中加油包線進行比較,從而決定加油機、受油機飛行包線的重疊區域,定義出空中加油時加油機、受油機組合的最寬的潛在包線。

(a) 機翼下吊艙加油點
(b) 機身下中心線加油平臺
2.2 空中加受油模擬空中加油動態特性飛控驗證
對于大型空中加油機(吊艙和中心線加油平臺軟式)多點加油狀態、復雜的流場條件下,加油過程中的加油機、受油機、加油吊艙/中心線加油平臺軟管、錐套等的氣動性能均受到一定程度的影響,場內各個單元的氣動特性和干擾產生機理復雜,流動控制難以把握(俄羅斯某大型加油機CFD計算的部分結果,如圖3所示[10]),因此需要建立加油機、受油機和加油裝置的動力學模型,模擬空中包線下的飛機動態特性飛行。由于目前多機編隊試驗,不同模態與載機氣動干擾及干擾耦合特種風洞試驗技術精確模擬有較大難度,在大型飛機成功對接之前,需要進行充分的地面試驗驗證,以保障空中的安全性。
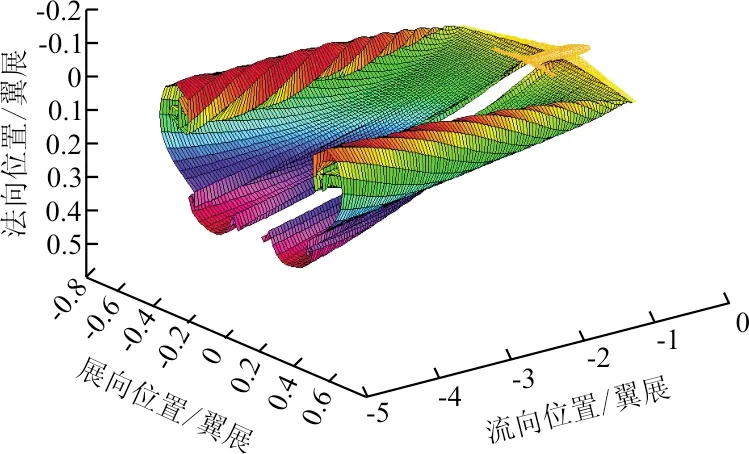
圖3 俄羅斯某大型加油機CFD計算結果
同時在受到外界干擾情況下,如陣風、突防或系統故障時,應付空中遇到的突發情況,必須在地面進行充分驗證。因為加油機—加油裝置—軟管/錐套—受油裝置—受油機在空中形成一個整體,每一個環節都要保證絕對安全,必須通過地面驗證,并通過飛控實現對飛機安全性操縱,因此需要開展地面加油機、受油機相對運動驗證。
特別是作為戰斗單元的受油,由于其平臺本身、帶外掛載荷等不同構型的氣動特性差異較大,因此其空中受油的飛行姿態各不相同,特別是在大型空中加油機的干擾中,受油機受到的加油機下洗、側洗引起的附加縱向、橫向力矩更為復雜[11-15],需要進行充分驗證,以降低空中加油的不確定因素。
受油機若從大型加油機對稱面正后方進入時,在加油機下洗流場的干擾下,受油機將產生抬頭力矩,且升力有所減少。若從大型加油機的翼尖加油吊艙后進入時,由于加油吊艙基本位于翼尖集中渦渦核軸線的正下方,其尾渦將使受油機產生較大的滾轉力矩。當受油機逐步向加油機靠近時,干擾流場逐步加強,到達預對接位置處兩機相距很近,受油機完全處在加油機的尾渦區內,并在尾渦的強烈干擾下,對受油機氣動特性產生很大影響。
由于加油機下洗的影響,受油機升力向后傾斜,從而增加了升致阻力,當受油機從加油機的下方向趨近時,還會發生配平變化。
(1) 縱向特性分析
受油機的縱向特性,俯仰力矩的產生,主要是由于在機翼和平尾上(依賴于平尾位置)的平均下洗強度的不同所致。當一個高平尾的受油機從下面趨近正常受油位置時,在平尾上的下洗強度比在機翼上的要大,受油機則產生抬頭部力矩。在正常的加油位置時,飛機顯示了對垂直位移的靜穩定性,這是因為受油機向上位移,會使其產生較小的升力和低頭力矩,反之亦然。
(2) 橫側向特性分析
對于受油機的橫側向特性,最重要的氣動干擾項是加油機機翼滾轉和側滑位移在受油機上產生的滾轉力矩。從穩定性意義上來說,滾轉力矩作用在滾轉位移之后,導致受油機試圖使機翼恢復到水平位置。側滑位移的變化,導致受油機升力偏向加油機的對稱面。由于加油機尾渦引起受油機氣動力導數的變化,使受油機的穩定性出現發散振蕩現象。
大型受油機在空中加油時,還有可能失去方向穩定性,且隨著加油機升力系數的增加,方向不穩定性也增加,其部分原因是由于加油機側洗對受油機垂尾的影響。有關試驗表明,受油機的方向安定性導數隨偏航位移的增加會大幅減少。
顯然,隨著加油機和受油機之間相對距離的縮短及其相互干擾流場的加強,受油機的氣動力以及氣動導數均隨之變化,飛行姿態也要改變,因此需要適時調節受油機的各有關舵面(副翼、升降舵、方向舵等)和迎角、油門的大小等,以保持加/受油機的相對速度和飛行姿態,保證飛機加油任務的完成和飛行的安全。
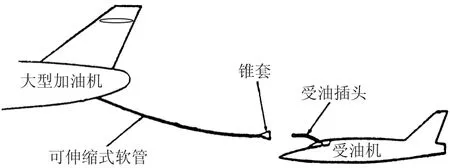
此外,加/受油機相對速度是空中加油過程中的氣動力敏感參數。受油機相對于加油機的前進速度必須保持在一定的范圍內。前進速度過慢,加油錐套會在受油機前推氣流作用下逐漸擺離受油探頭,難以實現對接;前進速度過快,則可能釀成飛行事故。不同型號的軟式加油裝置所要求的安全對接速度范圍也各有不同,通常為1~1.5 m/s。
2.3 空中加受油軟式空中加油對接規律驗證
由于軟式空中加油的對接過程涉及加油機與受油機氣動力、軟管-錐套的特性、環境因素、加受油包線等約束,對接速度還要受不同受油機、多架受油機同時加油的影響,因此在確定最終的加油對接速度時,需要綜合考慮上述因素。通過模擬單架受油機不同對接速度下錐套的運動規律,根據加油機供油量和受油機受油量的變化,對飛機姿態進行控制,從而為其對接速度、脫離位置的合理選取提供參考,采用地面驗證[16]及分析方法可適用于其他空中受油情況。
如果受油機以較低速度對接,加油軟管受到機翼側洗、下洗影響有一定下沉量和外偏量,錐套呈現周期性震蕩,對接具有一定的難度,受油機難以跟隨加油機成功加油;當對接速度過快,易在氣動力作用下形成軟管上翻揚起現象,承受巨大彎矩,受油插頭將出現折斷的危險。同時由于受油機飛行姿態隨著受油量的變化而不及時調整,容易引起受油插頭與錐套的夾角增大,也容易造成受油插頭折斷或脫開困難。因此,需要地面充分驗證加油機、受油機的對接規律。
2.4 空中加受油成功對接態勢感知加油系統驗證
空中加受油時,前/后及左/右飛機間必須保持一定的防撞間距,預留反應時間,避免空中撞機事故。受油機與加油機會合過程中,未建立目視聯系前,北約ATP-56《空中加油程序手冊》中要求:兩機至少應保持150 m的垂直間距和450 m的水平間距,如圖4所示[9]。

圖4 未建立目視聯系前兩機間距
受油機與加油錐套對接成功并進入輸油狀態后,各國對于受油機與加油機之間的防撞間距也有嚴格限制[17-18],我國GJB 1398-1992《插頭-錐管式空中加油系統通用規范》對機翼吊艙式軟式加油要求如下:“當在全拖曳位置前方至少4.6 m的加油位置對接好時(指最佳加油區),受油機機頭應位于加油機機翼后緣之后;吊艙軟管放出口中心與受油機插頭軸線之間的垂直間隔不小于1.5 m”[19],如圖5所示。關于并列兩架受油機間的橫向間距,我國目前還沒有具體標準。
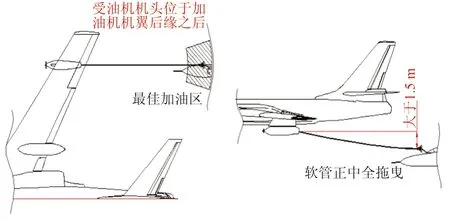
圖5 受油機與加油機之間的防撞間距
除防撞外,確保后方受油機處于較好的流動區域也是相鄰飛機應保持安全間距的重要原因。空中加油時,處于加油機尾流場中的受油機能否保持較好的操穩品質直接關系到能否成功對接以及對接后能否穩定輸油。因此,針對加油機尾流場特性,合理規劃受油機與加油機間的安全間距(含縱向、橫向及高度方向),使受油機避開加油機的強渦流區,是軟式空中加油順利實施的關鍵步驟之一。
對于翼下吊艙式加油裝置而言,對接和輸油時加/受油機間的安全間距主要由吊艙展向吊掛位置和輸油軟管長度來確定;對于身下中心線加油平臺而言,加/受油機間的安全間距則主要由輸油軟管長度來確定。不同型號的加油機,由于自身尾流影響區域及強度的不同,其輸油軟管的長度存在很大差別,如KC-10翼下吊艙的輸油軟管長達24 m,而早期軟管全拖曳長度僅為14.6 m。
空中加油過程中,加油機和受油機相距僅有二十幾米,且在加油對接過程和加油過程中兩機較長時間保持近距離飛行,加油機和受油機需要協同飛行,需要驗證航電系統提供高精度的機載防撞算法、機載防撞測向、復雜環境下解碼輸入,給出加受油機定位、保持距離、位置監測和反饋,保持相同的飛行速度、航向和姿態,固定飛行高度。因此需要通過驗證飛控系統對外界信息感知和加油過程中飛機狀態參數的變化規律,研究干擾流場下飛行動力學特性,給出空中加油總體防撞策略,制定協同飛行實時傳輸解算作為協同飛行設計輸入,以保證加油過程安全進行。
2.5 大型空中加油機與受油機空中加油成功對接培訓需求
由于軟式加油主要為受油機飛行員追蹤加油機錐套進行跟進對接,對受油機飛行的掌控飛機具有較高的要求。特別在高T型垂尾、上單翼面的大型加油機強干擾流場下,小型受油機受到的干擾較大。多機氣動干擾分析,受油機受到前方大型加油機側洗和下洗影響,其偏航力矩和縱向力矩變化在5%~8%。經統計,受油機在受油初始狀態對接成功率不到20%,經過訓練后逐步提升到50%,后期能達到80%以上。因此,需要加強對地面飛行員的操作培訓,熟練掌握對接規律,可有效提高飛行中加油對接的成功率,縮短飛行周期,節約經費。
3 結束語
通過對國外典型的大型加油機的加油編隊體系及其空中安全加油程序進行研究并總結,給出受油機動態進近前方大型加油機過程中安全對接基本流程,提出并分析總結確保大型加油機空中加受油安全對接控制驗證要素,由這些要素可以看出大型加油機空中加/受油是一個復雜的系統工程,影響因素與大型加油機/加油裝置、受油機/受油裝置的布局及位置等息息相關。