濕蒸汽參數(shù)后向異軸散射測量模型的優(yōu)化及實驗研究
2020-07-07 11:09:28胡青松黃章俊黃竹青唐振洲袁志超羅艷珍
激光與紅外 2020年6期
胡青松,黃章俊,黃竹青,唐振洲,袁志超,羅艷珍
(長沙理工大學(xué)能源與動力工程學(xué)院,湖南 長沙 410114)
1 引 言
火電機組中汽輪機末幾級和核電站汽輪機的大部分級都在濕蒸汽環(huán)境中工作。濕蒸汽存在不僅會增大機組損失,降低運行效率,甚至還會引發(fā)安全事故[1]。濕蒸汽中的水滴粒徑r0.5、濃度N和尺寸分布參數(shù)K是汽輪機末幾級蒸汽濕度監(jiān)測的主要參數(shù)。測量濕蒸汽各參數(shù),能夠更快更準(zhǔn)得到蒸汽濕度,為鍋爐給水量提供依據(jù),對整個火電機組安全經(jīng)濟運行具有重要意義[2]。
Mie散射光信號中除了包含濕蒸汽參數(shù)變化和分布情況信息外,還存在干擾光和各種噪聲,這都將對濕蒸汽參數(shù)的獲得造成影響。利用相減消光的方法可以減少干擾光和背景光的影響[3],再采用均值濾波的方法對實驗測量時獲得的圖像進行降噪處理[4-6]。本文在分析后向異軸散射法中的幾何模型[7]存在的問題的基礎(chǔ)上,對其進行了重新構(gòu)建,并推導(dǎo)出幾何模型的相關(guān)參數(shù);并對光強計算理論模型和CCD相機信號的提取進行了優(yōu)化。通過模擬計算獲得后向異軸散射測量系統(tǒng)中CCD相機最佳的接收距離d和濕蒸汽參數(shù)r0.5、K、N的值,并與穩(wěn)定工況和變工況條件下的實驗反演數(shù)據(jù)進行對比和驗證。
2 濕蒸汽測量原理及模型構(gòu)建
2.1 測量理論模型及原理
基于CCD成像技術(shù)[8]的后向異軸散射法測量汽輪機濕蒸汽的模型如圖1所示。
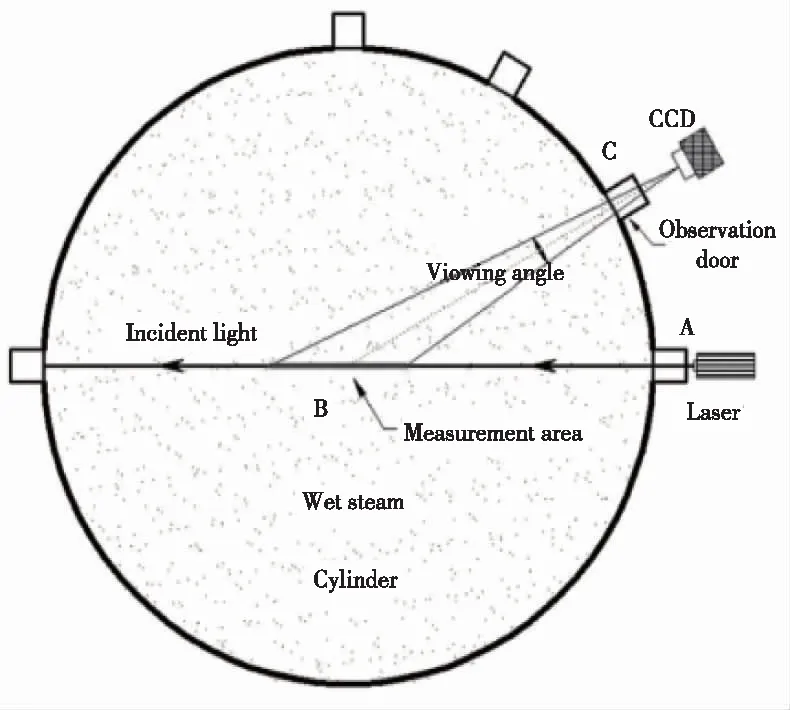
圖1 濕蒸汽測量模型
激光源發(fā)射出穩(wěn)定激光束,水平穿過模擬汽缸橫截面中心并在濕蒸汽區(qū)發(fā)生散射,由固定于汽缸觀察窗口上方的CCD相機進行接收,接收到的散射光圖片傳輸至計算機后進行信號處理提取和計算。假設(shè)汽缸內(nèi)各個水滴微粒間的散射光互不影響,各自不發(fā)生復(fù)反射,只發(fā)生單次散射,且水蒸氣對可見光的吸收系數(shù)為零,因此可以把水滴群的散射特性當(dāng)作是單個水滴散射特性的線性疊加,采用R-R函數(shù)來描述汽缸內(nèi)濕蒸汽水滴微粒地分布。
當(dāng)入射光為非偏振光時,激光器發(fā)出的激光到達CCD相機共經(jīng)歷衰減(A→B)、散射(B)、衰減(B→C)三個過程,發(fā)生兩次衰減的過程遵循Lambert-Beer定律,發(fā)生散射的過程遵循Mie散射理論,入射光強為I0,則入射光到達CCD相機的散射光強為Is:

(1)
式中,L01、L02為兩次衰減區(qū)域的長度,m;τ為濁度;rmax、rmin為水滴半徑的上限和下限,測量的濕蒸汽主要為一次水滴(粒徑r范圍為0.1~2 μm);r0.5為質(zhì)量中間半徑,其物理意義是大于或小于該質(zhì)量半徑的顆粒的數(shù)目占水滴顆粒總數(shù)的50 %;i1(θ)、i(θ)是散射強度函數(shù);θ為散射角;θ1、θ2為散射角度的范圍;V是散射體體積,m3;dθ是散射微元對應(yīng)的散射立體角;f(r)為水滴粒徑分布概率密度函數(shù);Δφ是散射微元對應(yīng)的方位角。由公式(1)可知,對該測量模型進行仿真計算時,還需得到每個散射體對應(yīng)的L01、L02、V、Δφ的幾何計算式。
2.2 實驗?zāi)P偷膸缀螀?shù)求解
CCD相機成像原理如圖2所示,其分辨率為1600×1200像素,視場角5.0°×3.7°,按分辨率將其分成縱橫排列的1600×1200個像元,相機的每一個像元都與物面上相應(yīng)的區(qū)域一一對應(yīng)并接收某一立體角內(nèi)的散射光。
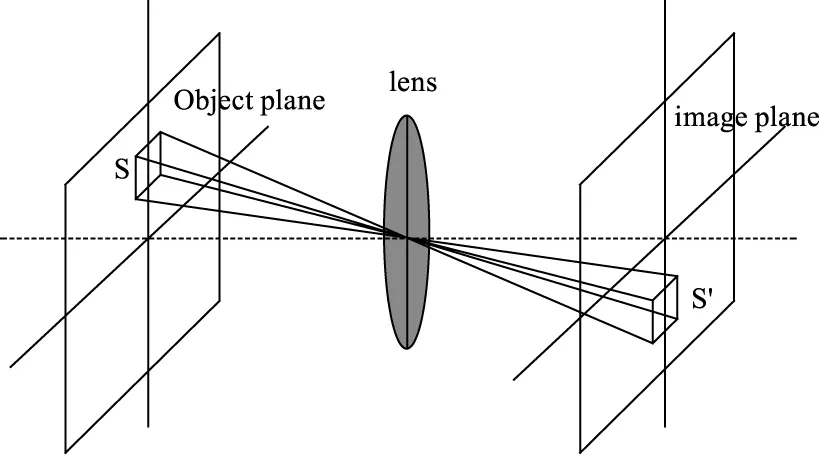
圖2 CCD相機的成像原理
本文以CCD相機的縱向中間線(縱向第800列像元)所對應(yīng)的橫向1200個微元體作為研究對象[9]。
濕蒸汽水滴散射微元體的構(gòu)建與計算的準(zhǔn)確度對理論計算模型和反演尋優(yōu)的精度影響很大。為簡化幾何參數(shù)的計算模型,將激光器發(fā)出的圓柱激光束截面視為長方體,散射微元體視作上下底面均為等腰梯形四周為長方形的六面體,并利用體積修正系數(shù)β消除計算過程中的誤差。則微元體對應(yīng)的散射區(qū)域和幾何模型如圖3(a)所示,散射微元體放大圖如圖3(b)所示。
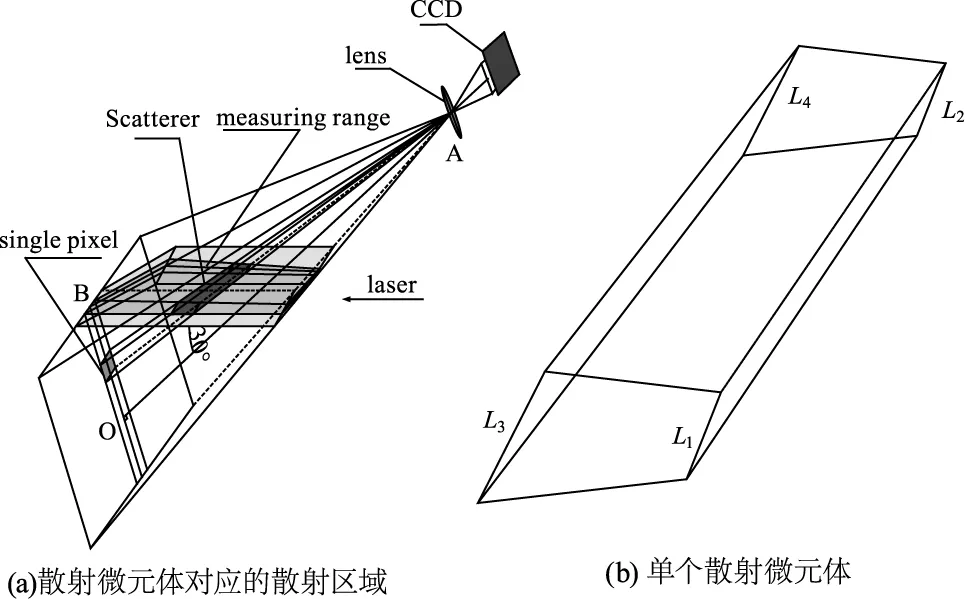
圖3 第j個像元所對應(yīng)的散射區(qū)域和散射體模型
如圖4所示,以圖3(a)中O點為原點,OA為X軸,OB為Y軸建立直角坐標(biāo)系,X1,X2,X3和X4分別為散射體的上下梯形的底邊位置坐標(biāo),第j個像元對應(yīng)的散射微元體積為Vj,由幾何運算得到關(guān)系表達為:
(2)
(3)
(4)
(5)
(6)

(7)
(8)
(9)
式中,a是單個像元邊長與相鄰兩像元之間縫隙距離的和,為6.3 μm;γ是圓柱激光束的截面直徑,為0.75 μm;f是透鏡焦距,為0.075 m;d為CCD相機橫截面中垂線到汽缸散射微元體的距離,m;AO是CCD相機橫截面到汽缸散射微元體的最遠距離,m;β為單個散射微元體體積修正系數(shù)。
圖4 單個散射微元體建模的二維剖面
由公式(1)可知,對散射光強進行計算時還要得到第j個像元所對應(yīng)的方位角Δφ、衰減區(qū)長度L01j、L02j,幾何參數(shù)在每個散射體單元都不相同。方位角Δφ表示散射光接收截面與散射體的位置關(guān)系,表達式為:
(10)
式中,ρ是鏡頭半徑,為0.0134 m。
第j個散射體對應(yīng)的衰減區(qū)長度為:
(11)

(12)
從式(2)~(11)可以看出,幾何參數(shù)V、L01、L02都與接收距離d有關(guān)。根據(jù)測量模型和幾何模型的具體參量,改變d的取值,V、L01、L02變化規(guī)律如圖5所示。
(a)對L01的影響
(b)對L02的影響
(c)對V的影響
從圖5可發(fā)現(xiàn),當(dāng)CCD相機的接收距離d=0.32 m時,曲線的斜率最小,V、L01、L02值隨像元位置變化基本保持不變。接收距離越大,曲線斜率越大,使第j個散射體在整個像元范圍內(nèi)的幾何參數(shù)V、L01、L02的差值變化趨勢增大,CCD相機底片中像元之間的縫隙變大,最終導(dǎo)致CCD像元偏大,進而導(dǎo)致單個散射體計算誤差偏大。
3 仿真模擬與實驗數(shù)據(jù)分析
3.1 仿真模擬分析
在測量模型和參數(shù)確定后,通過MATLAB編程進行仿真模擬,可以得到后向異軸散射實驗?zāi)P拖耫、r0.5、K、N對散射光光強I影響的仿真結(jié)果。根據(jù)實驗儀器參量設(shè)定仿真條件,模擬汽缸直徑D=0.437 m,激光波長為λ=0.532 μm,折射率m=4/3。結(jié)合實驗儀器參量和式(1)進行仿真計算,得到CCD相機接收距離d、水滴質(zhì)量中間半徑r0.5、尺寸分布參量K、水滴數(shù)濃度N對散射光強I的影響規(guī)律,變化曲線如圖6所示。
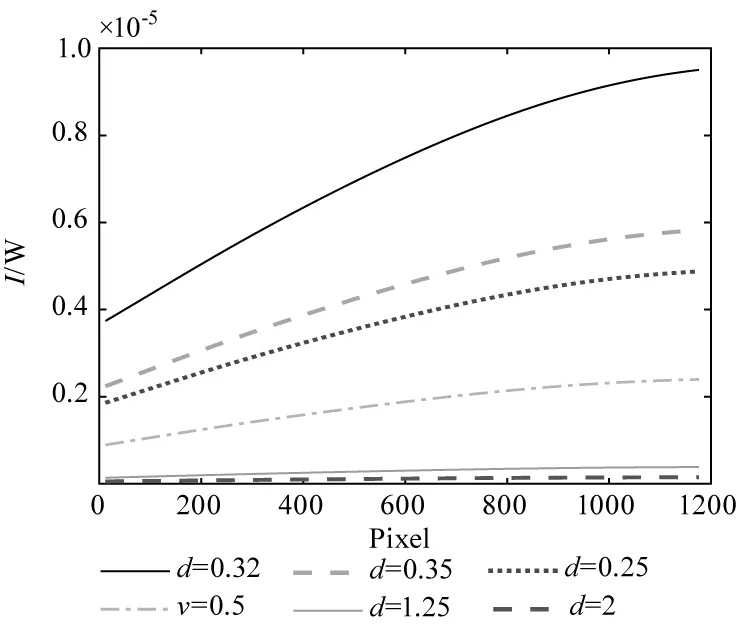
(a)d的影響
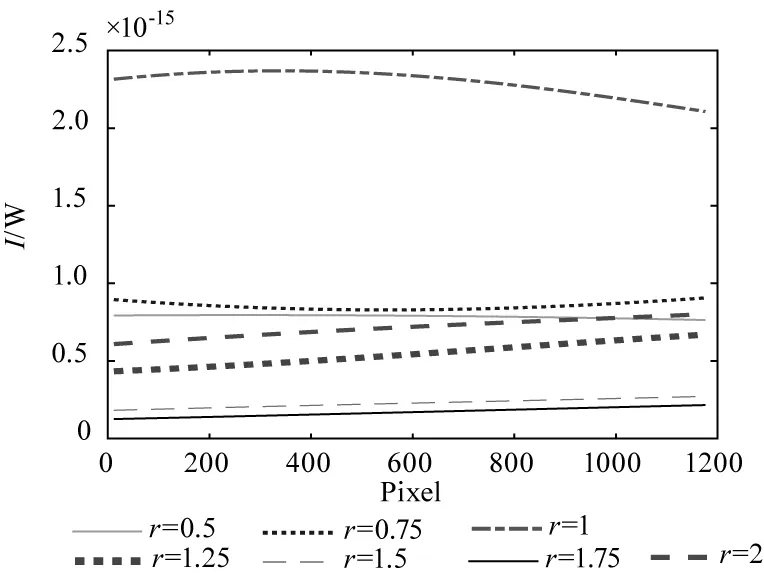
(b)r0.5的影響
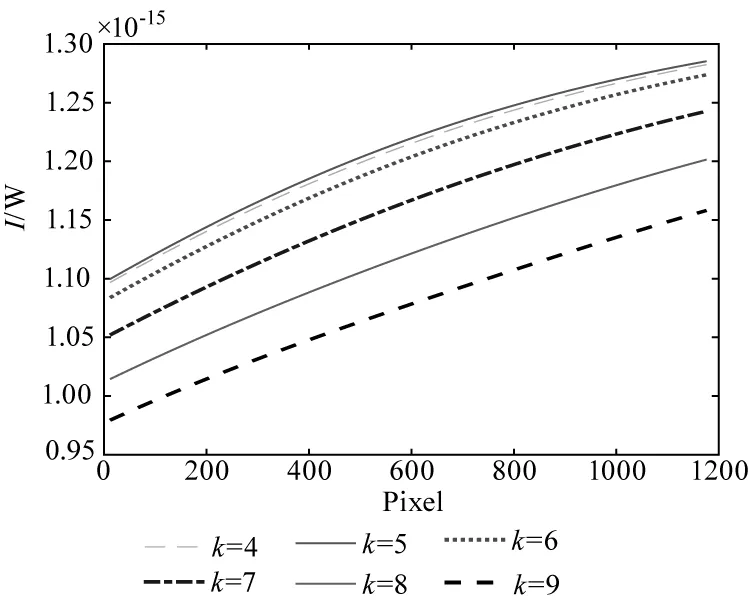
(c)K的影響
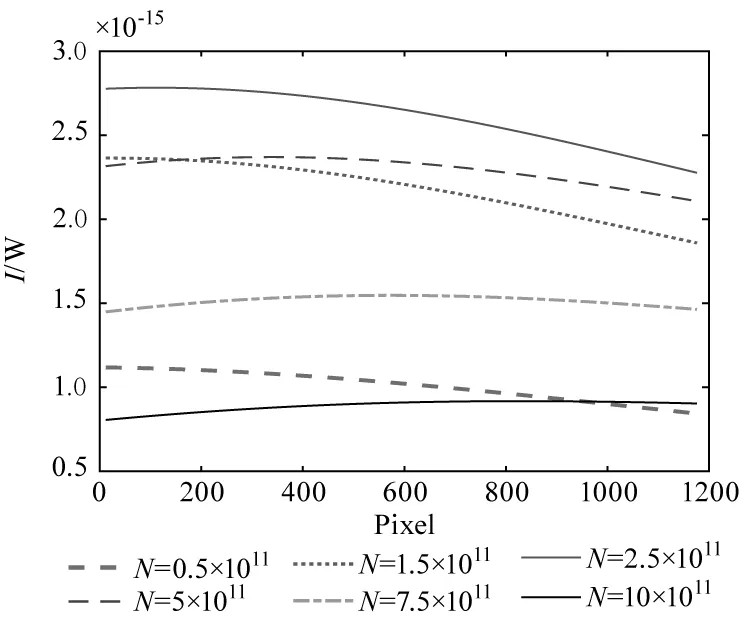
(d)N的影響
圖6(a)是在保持r0.5、K、N不變時,對接收距離d進行分析。分析圖6(a)可知,在接收距離d=0.32 m時散射光強達到最大。CCD相機的視場角為5°×3.7°,若CCD相機的接收距離太小,從汽缸觀察窗口投射出來的散射光則不能完全出現(xiàn)在相機接收的視場角內(nèi),最終使相機接收的散射光強減小。若CCD相機的接收距離過大,從汽缸觀察孔射出來的散射光在到達CCD相機之前,會有一部分光在傳輸過程中被周圍環(huán)境耗散掉,最終導(dǎo)致到達CCD相機的散射光會減少,因此散射光強也會變小。考慮到濕蒸汽整個測量系統(tǒng)的復(fù)雜性,通過仿真模擬得到的CCD相機接收距離d=0.32 m為實驗測量系統(tǒng)中CCD相機的實際接收距離。
圖6(b)是d、K、N不變,質(zhì)量中間半徑對散射光強分布的影響。分析圖6(b)可知,不同的質(zhì)量中間半徑的水滴群的散射光強隨像元位置變化規(guī)律不相同。r0.5=0.5 μm時散射光強隨像元位置單調(diào)減小,r0.5=1.25 μm散射光強隨像元位置單調(diào)增大且光強值比r0.5=0.5 μm的小,當(dāng)水滴中間質(zhì)量半徑r0.5=1 μm時散射光強達到最大。導(dǎo)致這一現(xiàn)象的主要原因是因為不同粒徑的顆粒物散射特性不同。
圖6(c)是d、r0.5、N不變,尺寸分布參數(shù)對散射光強分布的影響。分析圖6(c)可知,在K=5時散射光強達到最大。這是由于在汽輪機汽缸中不同的位置水滴的稀疏程度不同,水滴群的粒徑分布也不同,散射光強接近單一分散系的震蕩特性。
圖6(d)是d、r0.5、K不變時,水滴數(shù)濃度對散射光強分布的影響。分析圖6(d)可知,在N=2.5×1011時散射光強值達到最大。汽輪機汽缸中流動的過熱蒸汽隨壓強變化而發(fā)生狀態(tài)的變化,不同位置處蒸汽狀態(tài)不同,水滴群的顆粒濃度也就不同。在汽缸中部由于水滴的運動速度過快,水滴分布比較稀疏,測得的散射光強就較弱。由式(1)可知,當(dāng)水滴濃度一定時,散射比以自然常數(shù)e的幾何級數(shù)減小,水滴群對光強的衰減作用越來越強。
3.2 實驗數(shù)據(jù)分析
3.2.1 CCD信號處理
實際的CCD成像像元中既含有信號又含有噪聲。在實驗和實際運用中,利用后向異軸散射法對濕蒸汽進行測量時,會存在噪聲和干擾光等因素對測量結(jié)果精確度產(chǎn)生影響。因此在利用實驗獲取散射光數(shù)據(jù)進行濕蒸汽參數(shù)計算前,需要對圖像進行處理。
圖7(a)是模擬汽缸內(nèi)部沒有濕蒸汽時的空白圖像,這時因為沒有水滴顆粒物存在,所以散射光為一條細(xì)細(xì)的直線,且整個散射圖像也比較暗淡。但是,孔壁處存在一個半月牙型的反射光,有圖案就說明空白數(shù)據(jù)對濕蒸汽測量有影響。圖7(b)是內(nèi)部充滿濕蒸汽時的圖像,可以發(fā)現(xiàn)散射光線比較粗且發(fā)散,圓形孔壁處由于被濕蒸汽覆蓋不是那么清晰可見。為減少干擾光的影響,需要進行消光處理。進行實驗時,保持曝光時間和入射激光束不變,連續(xù)拍攝兩張CCD圖像,一張是模擬汽缸內(nèi)充滿濕蒸汽時的CCD圖像,另一張是無濕蒸汽顆粒的CCD圖像。通過圖像處理軟件將兩次拍攝的CCD圖像的對應(yīng)像元信號相減,得到的信號就是減少了干擾光的空白數(shù)據(jù)影響。處理結(jié)果如圖7(c)所示,圖像中的散射光柱清晰集中,孔壁明顯可見,有利于計算光強得到更為精確的散射光強度。
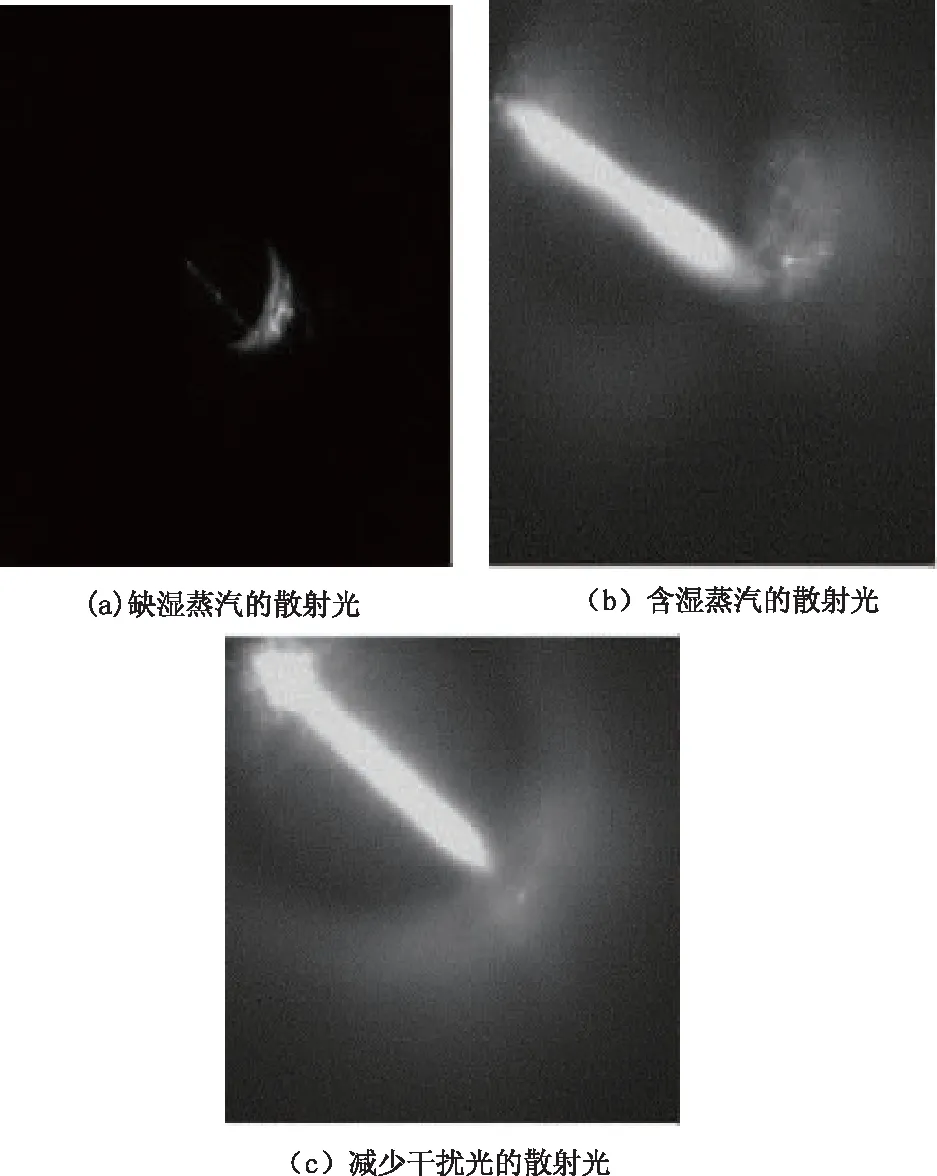
圖7 散射光圖像處理
除了要消除干擾光中空白數(shù)據(jù)的影響,還需要考慮實驗測量中CCD圖像噪聲的影響,利用均值濾波方法對不同工況的兩幅實驗散射光強圖片縱向第800列像元灰度值進行濾波降噪處理,實驗圖像的降噪處理如圖8所示。由圖8可以看出,進行降噪處理后的曲線變得相對平滑,能有效提高對濕蒸汽參數(shù)實驗反演的精確度。
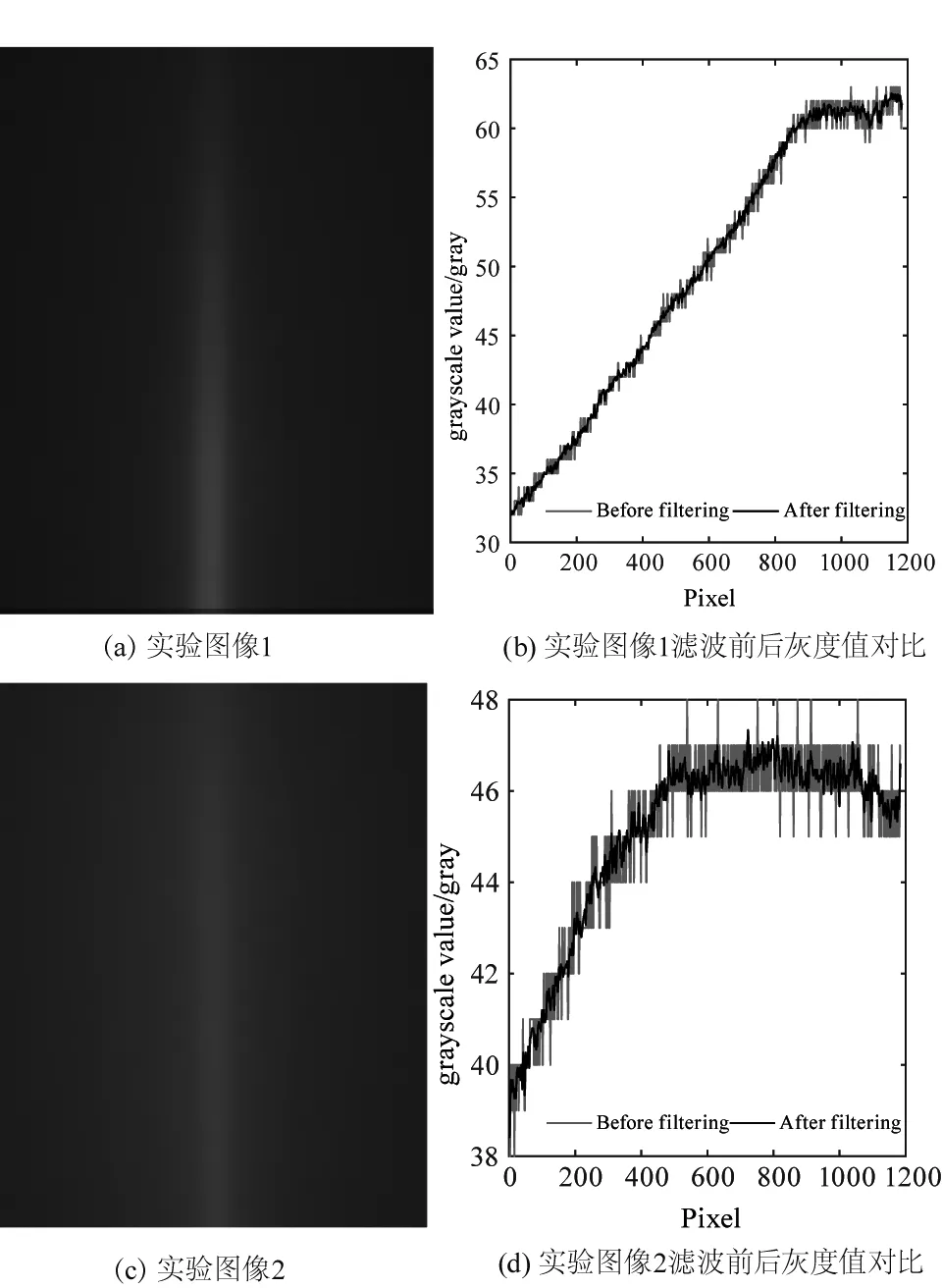
圖8 實驗圖像的降噪處理
3.2.2 CCD像元信號提取
根據(jù)理論模型設(shè)計實驗,在CCD相機的像元未達到飽和時,CCD像元灰度值與散射光強度呈比例關(guān)系,即灰度值越高,像元上散射光強越大。當(dāng)CCD相機的比例系數(shù)確定后,通過讀取計算機接收到的散射光圖片的灰度值,再由比例換算得到散射區(qū)域不同散射角的散射光強度。比例因子表達式為:
(13)
式中,G1為所有像元灰度值之和,gray;G0為產(chǎn)生的像元灰度值之和,gray;P1為CCD接收到的散射光功率,μW;P0為環(huán)境光功率,μW;CDD曝光時間為Δt,s;灰度值與散射光強的比例因子為υ,μW/gray。
在CCD相機標(biāo)定過程中,由于入射光強太弱、環(huán)境光強變化和CCD相機靈敏度高等原因會產(chǎn)生誤差。為了降低標(biāo)定誤差,重復(fù)進行了五次實驗,取五次測量結(jié)果的平均值作為標(biāo)定值。由表1可知,CCD相機的比例因子為4.5871×10-11μm/gray;實驗標(biāo)定計算得到的比例因子都在誤差允許范圍內(nèi)。在后續(xù)試驗中,CCD相機的曝光時間、增益系數(shù)和F數(shù)等參數(shù)與標(biāo)定時的參數(shù)完全相同時,可以直接利用上述的標(biāo)定結(jié)果,再由CCD拍攝的灰度圖像計算得到各個散射角對應(yīng)的散射光強度大小。
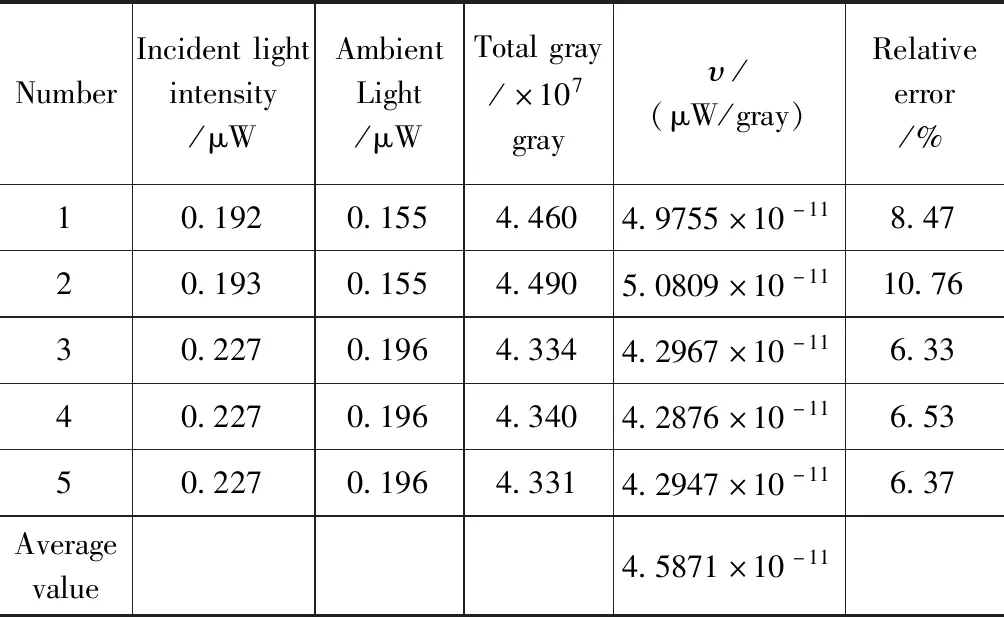
表1 CCD相機標(biāo)定數(shù)據(jù)表
3.2.3 濕蒸汽參數(shù)反演優(yōu)化模型
后向異軸角散射法測量汽輪機濕蒸汽參數(shù)模型主要分為實驗和理論計算部分,利用實驗與理論獲得散射光強數(shù)據(jù),通過濕蒸汽參數(shù)測量理論模型反演計算出濕蒸汽參數(shù)。本文針對汽輪機汽缸內(nèi)部濕蒸汽濕度測量參數(shù)的反演問題,以散射比的最小二乘擬合偏差最小為優(yōu)化目標(biāo),采用分布函數(shù)限定算法建立相應(yīng)的濕蒸汽參數(shù)反演優(yōu)化模型,具體如式(6)所示[10]。
(14)
式中,X為濕蒸汽參數(shù)反演優(yōu)化模型中的尋優(yōu)參量;F(X)為濕蒸汽參數(shù)反演優(yōu)化模型的目標(biāo)函數(shù);Isj、Ij分別為第j個像元接收到的理論和實際散射光強,μW;θj為第j個像元橫截面中心線與入射光之間的夾角;L01j和L02j分別為第j個像元的入射光線從汽缸入口到濕蒸汽散射區(qū)以及濕蒸汽散射區(qū)到汽缸觀察窗口所經(jīng)過的距離,m;i1(θj)和i2(θj)為由Mie系數(shù)求得的在對應(yīng)散射角θj的散射強度函數(shù);θ1j、θ2j為第j個像元對應(yīng)的散射立體角的變化范圍區(qū)間;n為選取的CCD相機橫向像元數(shù),其余各參量的的含義與公式與上文相同。
3.2.4 不同工況下濕蒸汽參數(shù)實驗測量
為驗證仿真結(jié)果的準(zhǔn)確性和判斷后向異軸散射模型的可行性,取入射光強I0為20 mW,散射角θ為30°,接收距離d為0.32 m。利用均值濾波法對實驗獲取的CCD圖片進行降噪處理,利用相減消光法減少干擾光的空白數(shù)據(jù)影響,并通過CCD相機標(biāo)定得到比例因子,并將灰度值換算成散射光強值,最后得到測量濕蒸汽參數(shù)所需的實驗數(shù)據(jù)。然后,利用上述的濕蒸汽反演優(yōu)化模型進行反演求取濕蒸汽參數(shù)。圖9為穩(wěn)定工況下所測得的實驗圖像和反演結(jié)果。穩(wěn)定工況時模擬汽缸內(nèi)蒸汽工況參數(shù)如表2所示。
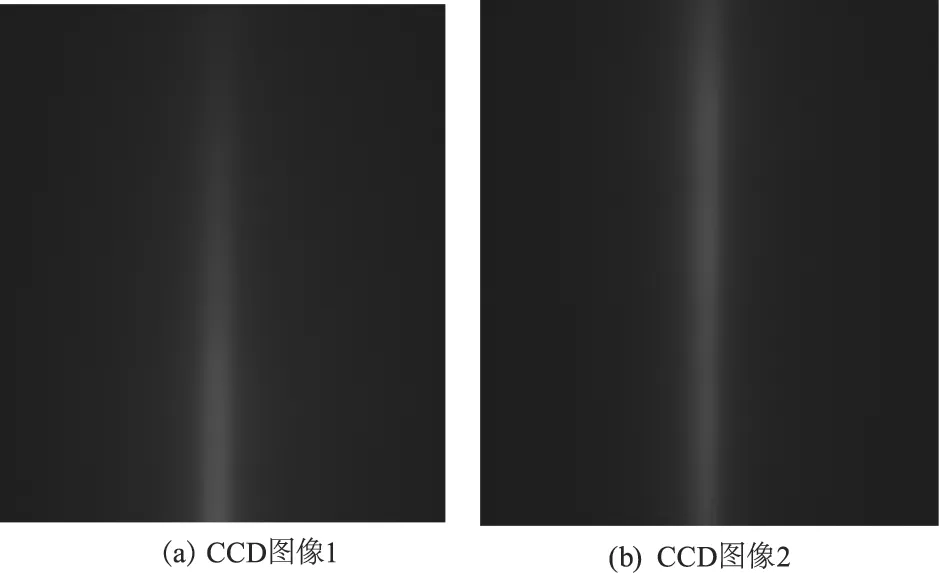
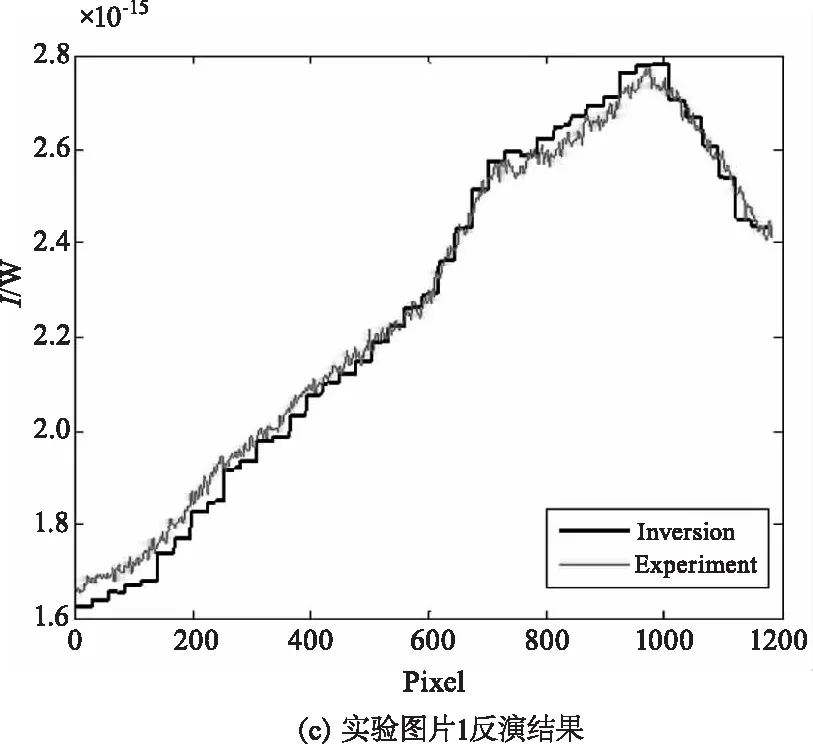
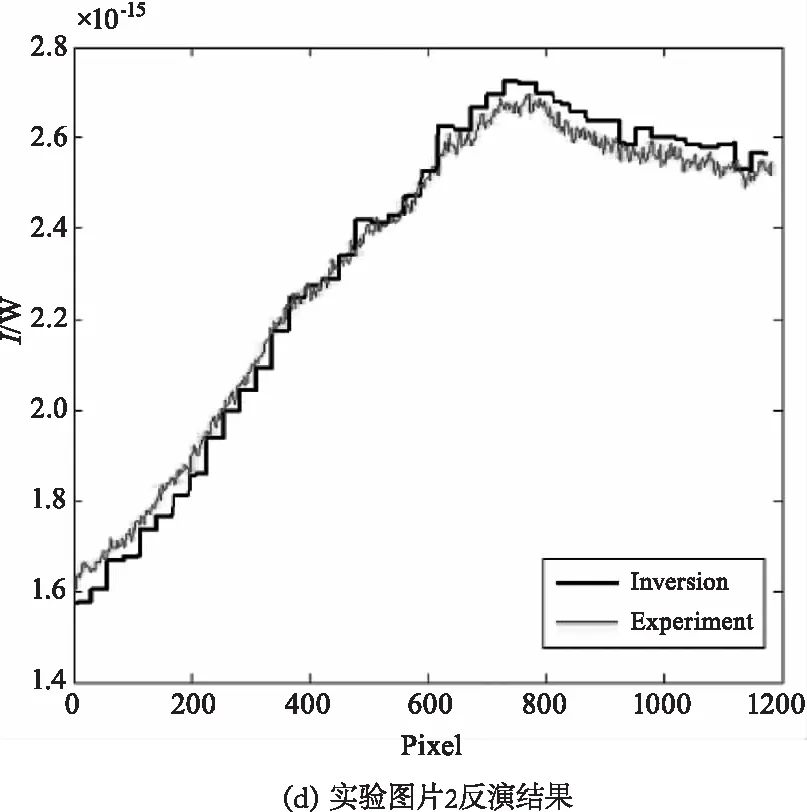
圖9 穩(wěn)定工況下實驗圖像和反演結(jié)果

表2 穩(wěn)定工況參數(shù)設(shè)定
注:初壓-P0;背壓-Pc;入口溫度-T0;尾部溫度-Tc;汽比容-Vv;水比容-Vw
對圖9實驗圖像進行去噪消光后提取縱向第800列像元的灰度值并換算成散射光強進行反演。在反演尋優(yōu)過程中,以28個像元作為一個單元體進行反演,則一列像元可計算得出42組參數(shù),將42組濕蒸汽參數(shù)反演結(jié)果取平均值(如表3所示)。由表3可知,同一工況下兩組圖片所反演出的濕蒸汽參數(shù)與仿真模擬得到的r0.5、K、N值非常接近。把反演結(jié)果帶到散射光強理論計算公式,將得到散射光強反演結(jié)果與實驗數(shù)據(jù)進行對比,經(jīng)過多段反演后,反演結(jié)果計算的散射光強理論數(shù)據(jù)與實驗數(shù)據(jù)變化趨勢與大小都比較吻合,符合實際情況,這也說明反演算法比較穩(wěn)定。
變工況計算處理方式與穩(wěn)定情況一樣。變工況參數(shù)設(shè)定如表4 所示,計算得到質(zhì)量中間半徑平均值r0.5、尺度分布參數(shù)平均值K、水滴數(shù)濃度N平均值如表3所示。變工況下散射光強反演結(jié)果與實驗數(shù)據(jù)的對比如圖10所示。
根據(jù)汽輪機濕蒸汽的測量模型,將實驗部分和理論計算部分的數(shù)據(jù)結(jié)合,再通過反演計算得到濕蒸汽參數(shù),如表3所示。由表3可以看出,在不同工況情況下,通過實驗反演得到的結(jié)果與仿真模擬得到最大散射光強下的濕蒸汽參數(shù)值非常接近。將MATLAB仿真的結(jié)果與實驗反演數(shù)據(jù)相比較,并進行誤差分析,可以發(fā)現(xiàn),無論是穩(wěn)定工況還是變工況下,濕蒸汽參數(shù)r0.5、K、N的誤差值均小于5.00 %,鑒于散射光強數(shù)量級較小,可認(rèn)為誤差在變化允許范圍內(nèi),表明在后向異軸散射模型下模擬的濕蒸汽各參數(shù)值與實驗值基本吻合。這驗證了仿真結(jié)果的準(zhǔn)確性和后向異軸散射測量模型的可行性。
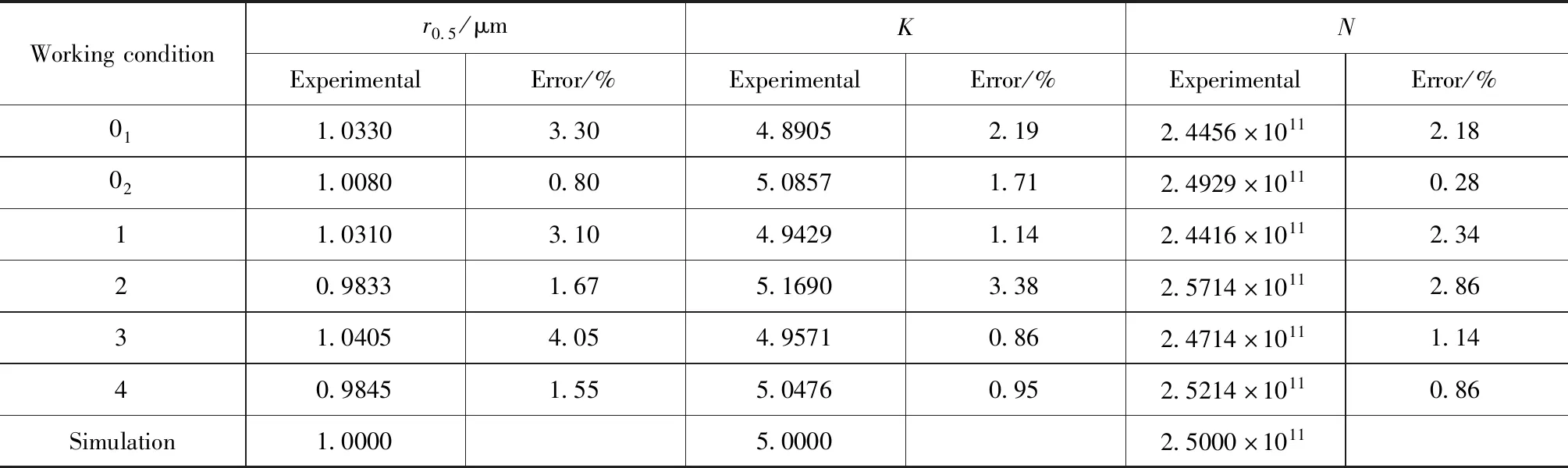
表3 不同工況下濕蒸汽參數(shù)值
注:編號01、02為穩(wěn)定工況實驗結(jié)果,編號1~4為變工況實驗反演結(jié)果

表4 變工況參數(shù)設(shè)定
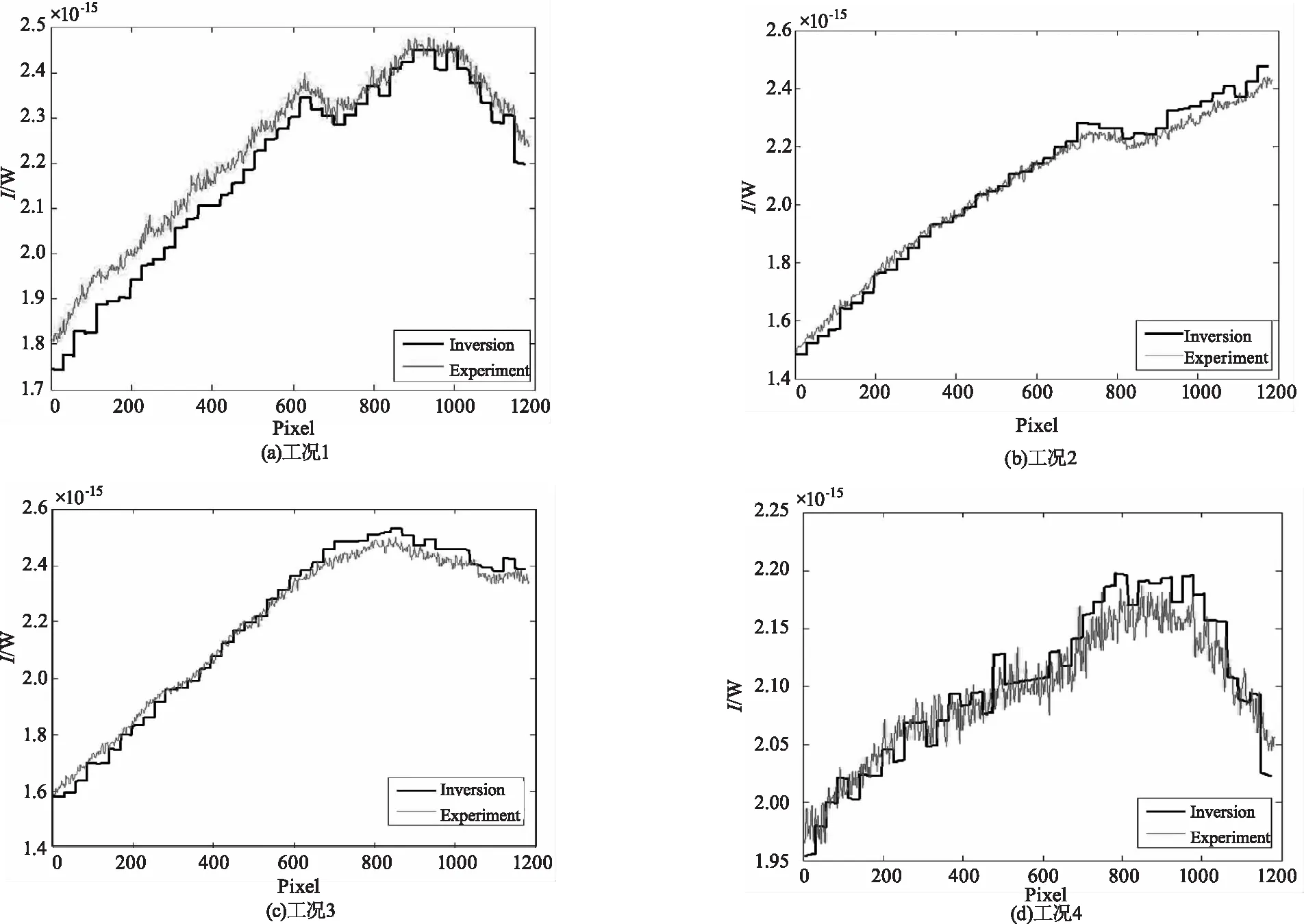
圖10 變工況下實驗與反演結(jié)果
4 結(jié) 論
基于CCD成像的激光散射測量方法,構(gòu)建了后向異軸角散射法汽輪機濕蒸汽測量模型,在此測量模型理論基礎(chǔ)上,對單個像元所對應(yīng)的散射體的幾何模型進一步優(yōu)化,求解得到相關(guān)幾何參數(shù),再將模擬結(jié)果與不同工況條件下實驗反演結(jié)果進行比較,結(jié)果表明:
(1)通過優(yōu)化散射微元體的幾何模型,建立新的幾何模型,解決了原幾何模型中視場角所對應(yīng)底邊不均分造成散射體之間大小關(guān)系不一的問題,避免了把不接收散射光的間隙也視作CCD相機像元的一部分而導(dǎo)致相機的接收面積過大,最終使測量模型的理論計算值偏大的問題。在優(yōu)化后的幾何模型基礎(chǔ)上,仿真模擬得到CCD相機的最佳接收距離d=0.32 m。
(2)在CCD 像元信號處理和提取時,利用相減消光法和均值濾波法對不同工況下CCD相機獲取的濕蒸汽圖像進行了處理,不僅使獲得的圖像的光柱清晰集中,濕蒸汽穩(wěn)定飽和,而且濾波后的灰度值曲線更加光滑,減小了誤差并提高測量精度。對CCD像元信號處理后,提取圖片縱向第800列像元的灰度值,通過CCD相機多次標(biāo)定,并取測量結(jié)果的平均值作為最終的測量結(jié)果,得到CCD相機的比例因子為4.5871×10-11μm/gray。
(3)基于后向異軸散射測量濕蒸汽模型,利用MATLAB 進行仿真模擬,得到了濕蒸汽的各參數(shù)值r0.5=1 μm、K=5和N=2.5×1011。在穩(wěn)定工況和變工況情況下,通過實驗測量和利用濕蒸汽參數(shù)反演優(yōu)化模型進行反演,得到了與仿真模擬得到的數(shù)據(jù)基本吻合的實驗反演濕蒸汽參數(shù)r0.5、K、N值,驗證了該模型模擬結(jié)果的準(zhǔn)確性和實驗的可行性,為以后的汽輪機濕度研究提供了科學(xué)的實驗依據(jù)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52