源域多樣本集成GFK的不同跟工況下滾動軸承壽命狀態識別
2020-07-16 03:50:49陳仁祥陳思楊胡小林董紹江黃鑫朱炬錕
振動工程學報 2020年3期
陳仁祥 陳思楊 胡小林 董紹江 黃鑫 朱炬錕

摘要:針對不同工況下滾動軸承壽命狀態識別時訓練樣本與測試樣本分布差異導致壽命狀態無法有效識別的問題,提出基于源域多樣本集成(Geodesic Flow Kernel,GFK)的滾動軸承壽命狀態識別方法。首先,采用無重復均勻隨機抽樣對源域類間樣本進行多次等量隨機抽樣得到源域內部多個訓練樣本以充分挖掘源域樣本信息;其次,將源域內部多個訓練樣本和目標域測試樣本輸入GFK,分別計算每個源域訓練樣本與目標域測試樣本的測地線核矩陣以充分利用源域樣本信息并提升GFK遷移學習能力;最后,利用核矩陣構造核分類器并輸出分類結果,采用一致性投票對所有源域訓練樣本下目標域測試樣本的分類結果進行集成以提升目標域測試樣本的識別準確率。不同工況下滾動軸承壽命狀態識別實驗驗證了所提方法的可行性和有效性。
關鍵詞:壽命狀態識別;滾動軸承;測地線流式核;遷移學習
中圖分類號:TH165+。3;TH133.33文獻標志碼:A 文章編號:1004-4523(2020)03-0614-08DOI:10.16385/j.cnki.issn.1004-4523.2020.03.021
引言
滾動軸承運行狀態對航空發動機、風電機組等大型精密設備的運行可靠性有直接影響。對其壽命狀態進行識別有助于預先判定設備所處運行階段,避免因突發失效造成的安全事故和經濟損失。
壽命狀態識別的本質是模式識別,其關鍵在于特征提取和狀態判定。為準確識別滾動軸承壽命狀態,Yu等提出基于多域特征融合和降維學習的滾動軸承退化狀態識別方法;陳仁祥等分別提出了基于振動敏感時頻特征和加噪樣本擴展深度稀疏自編碼神經網絡的航天軸承壽命狀態識別方法。這些方法取得了較好效果,但主要解決單一工況下滾動軸承壽命狀態的識別問題。實際工程中,滾動軸承工作環境惡劣,運行工況復雜多變,導致壽命狀態特征表征發生動態變化、測試樣本與訓練樣本分布特性存在一定的差異。需考慮多工況或不同工況下的滾動軸承壽命狀態識別。
對此,張焱等提出了多工況壽命模型加權輸出的方法,但實際中多工況數據難以獲取,該方法應用成本高。Liu等提取工況不敏感特征進行不同工況下的滾動軸承故障診斷,但該方法僅在微小差異工況和典型故障數據下進行討論,實際應用效果未知。
近年來,遷移學習以其跨領域、跨任務學習的優勢在各領域得到了廣泛應用。它放寬了傳統機器學習訓練樣本與測試樣本同分布和訓練樣本足夠多的兩個假設條件,在訓練樣本與測試樣本分布特性不一致時也能取得較好學習效果。在故障診斷領域,沈飛等將奇異值分解與遷移學習應用于不同工況下的電機軸承故障診斷;段禮祥等將遷移成分分析應用于不同工況下的齒輪箱故障診斷。可見,遷移學習方法能較好實現不同工況下的模式識別。
基于以上分析,本文將遷移學習應用于不同工況下滾動軸承壽命狀態識別,提出基于源域多樣本集成測地線流式核的不同工況下滾動軸承壽命狀態識別方法。GFK方法是Sha等在子空間抽樣測地線流形(Subspace by sampling Geodestic Flow,SGF)方法基礎上提出的一種領域自適應遷移學習方法。通過引入核映射大大簡化了SGF的求解過程。Alim等將GFK與SVM結合用于數據分布偏移的高光譜圖片分類;Saha等將GFK與最大邊緣聚類結合提出一種源域無標記樣本的無監督學習方法。
GFK參數少,計算簡單,易于實現,通過核矩陣構造核分類器提升了分類器的非線性分類能力。但實際應用中未能對源域訓練樣本信息進行充分挖掘和利用,遷移學習能力較弱,導致目標域測試樣本的識別率偏低。為提升目標域測試樣本的識別率,本文對GFK方法做了改進,得到源域多樣本集成GFK方法。在利用GFK對源域訓練樣本和目標域測試樣本計算測地線流式核矩陣之前,采用無重復均勻隨機抽樣對源域類間樣本進行多次等量隨機抽樣得到源域內部的多個訓練樣本,稱為源域多樣本;然后分別計算每個源域訓練樣本與目標域測試樣本的測地線流式核矩陣,利用核矩陣構造核分類器并輸出分類結果;最后,采用一致性投票對所有源域訓練樣本下目標域測試樣本的分類結果進行投票集成,得到最終分類結果。
1 測地線流式核方法
GFK利用特征變換方法,通過構造測地線流式核來得到高維投影矩陣將源域樣本和目標域樣本變換到一個公共空間。
GFK方法步驟:確定嵌入子空間最優維度d,構造測地線,計算測地線流式核矩陣G以及構造核分類器。
1.1 確定嵌入子空間最優維度d
GFK采用于空間不一致性度量(Subspace Dis-agreement Measure,SDM)來確定源域和目標域保持最大一致性的子空間維度d。
記源域數據集為s,目標域數據集為T。嵌入子空間維度d計算方法如下:
1)利用主成分分析(PCA)分別對s和T做變換得到兩個子空間PS和PT。
2)將s和T合并為一個數據集S+T,利用PCA對S+T做變換得到子空間PS+T。
3)分別計算PS,PT與PS+T,的空間夾角:αd,βd。
4)記兩個夾角的總度量為
D(d)=0.5[sinαd+sinβd] (1)
D(d)∈[0,1],D(d)=1,表示兩空間垂直。文獻[11]采用貪心算法來確定子空間最優維度d
d=min{d | D(d)=1} (2)
即子空間維度d=1,2,…盡可能取大,直到滿足第一次取到D(dmax)=1后,d的取值不再增加,則此時的dmax即為d的最終取值。
1.2 構造測地線
定義PS,PT為源域和目標域經PCA后的子空間,φ為測地線映射函數。設源域和目標域經φ映射后分別處于0和1兩個極點,即φ(0)=PS,φ(1)=PT。則對于處于[0,1]之間的點t,有:φ(T)∈G(d,D),G(d,D)表示D維向量空間中的d維向量構成的Grassmann流形,φ(t)由以下公式求得
φ(t)=PsU1F(t)-RsU2∑(t) (3)
1.3 計算測地線流式核矩陣G
1.4 構造核分類器
與其他基于內核的分類器一樣,GFK利用測地線流式核矩陣G將數據變換到高維空間,并根據數據在高維空間中的表示對數據類別進行識別。
此外,GFK提出ROD(Rank of Domain)指標
2 源域多樣本集成GFK
GFK方法來源于SGF方法并通過求解核矩陣G大大簡化了SGF方法的求解過程。然而,GFK方法將源域樣本整體視為一個單樣本參與學習,僅對其包含的信息利用一次,未能充分挖掘和利用源域樣本信息,遷移能力稍顯不足。
基于以上兩點,本文利用無重復均勻隨機抽樣對GFK進行改進得到源域多樣本集成GFK方法。具體步驟如下:
設Xs為C類別,每類樣本數為n1,n2,…,nc的源域標記數據集,Xt為C類目標域數據集,XT為Xt經隨機抽樣后得到的C類目標域測試樣本集。
1)對Xs每類樣本進行無重復均勻隨機抽樣,為保證樣本類別平衡,每類樣本的抽樣數均為n,n≤min(n1,n2,…,nc)共得到C×n個樣本組成的源域單樣本xs;
2)將步驟1重復k次,得到k個源域單樣本xs1,xs2,…,ssk也即源域多樣本集。
3)計算每個源域單樣本xsi(i=1,2,…,k)與XT的SDM指標以確定最優維度di;
4)將xsi與XT用于構造測地線并計算其測地線流式核Gi;
5)利用Gi構造核分類器并得到k個測試結果ytesti;
6)將5)的k個結果一致性投票得到最終識別結果。
由于核KNN分類器計算簡單,易于實現,無需參數估計和無需訓練等優點,故本文將核矩陣G用于構建核KNN分類器。
改進的源域多樣本集成GFK方法的流程圖如圖1所示,其中虛線框為本文方法改進部分。
3 基于源域多樣本集成GFK的不同
工況下滾動軸承壽命狀態識別
基于源域多樣本集成GFK的不同工況下滾動軸承壽命狀態識別包括:源域多樣本訓練集與目標域測試集構建、特征提取、集成過程和識別結果輸出。其流程圖如圖2所示。
3.1 源域多樣本訓練集與目標域測試集構建
對于源域標記數據,采用無重復均勻隨機抽樣從人種壽命狀態樣本中抽取n個樣本,得到一個源域單樣本訓練集,訓練集大小為h·n,待識別狀態數為h。將抽樣過程重復k次,得到源域內k個單樣本訓練集,也即源域多樣本訓練集。每個源域單樣本訓練集大小均為h·n,待識別狀態數均為h。
對于目標域未標記數據,從中抽取一定數量樣本構建測試集。為驗證本文方法對不同工況數據h種壽命狀態的識別情況,從每種壽命狀態樣本中抽取等量樣本用于構建目標域測試集。
3.2 特征提取
提取能夠反映滾動軸承壽命運行狀態的特征指標是正確識別滾動軸承壽命狀態的關鍵。目前反映滾動軸承壽命及退化狀態的特征主要有時域、頻域特征,小波包能量特征,小波包相對能量特征和信息熵特征等。
由于單域特征評估效果不足,故本文提取多域特征構建高維特征集。包括16維時域特征和12維頻域特征,8維db3小波3層小波包能量特征,8維db3小波3層小波包相對能量特征,8維db3小波3層小波包能量譜熵以及振動信號幅值譜熵、倒譜熵、自相關譜熵和奇異值譜熵等共56維特征。
3.3 集成過程與識別結果輸出
圖2中虛線框部分即為源域多樣本集成過程,包括:GFK核矩陣計算、核分類器構造、多測試結果和一致性投票。基于源域多樣本集成GFK的滾動軸承壽命狀態識別最終識別結果是由源域內多個單樣本訓練集和目標域測試集經過GFK以及一致性投票等過程得到的,充分利用了源域內部多個單樣本訓練集信息。
4 實驗驗證
4.1 全壽命周期數據壽命狀態識別
采用PRONOSTIA實驗臺采集的IEEE PHM2012Data Challenge加速壽命實驗振動信號數據進行實驗驗證和分析。此數據采樣頻率為25.6kHz,采樣間隔為10s,每個樣本采樣時間為0.1s。PRONOSTIA實驗平臺如圖3所示。
本文以文獻[19]提出的健康指數為依據將滾動軸承全壽命周期劃分為3種壽命狀態:磨合期、有效工作期和衰退期。IEEE PHM 2012Data Challenge包含多個工況條件下的全壽命周期實驗數據,本文選擇3個壽命狀態清晰劃分的工況工和工況2數據進行驗證。工況數據信息如表1所示。
為驗證本文方法對不同工況下滾動軸承壽命狀態識別的有效性,將工況工和工況2數據進行交叉驗證實驗。首先,以工況1為源域標記數據集,以工況2為目標域未標記數據集。然后,以工況2為源域標記數據集,以工況1為目標域未標記數據集。采用1000次無重復均勻隨機抽樣對源域數據每種壽命狀態各抽取10,20和30個樣本構建訓練集。即訓練集樣本數分別為30,60和90,每種數量的訓練集各1000個,即源域多樣本數為1000.對于目標域數據集,設置測試集樣本數分別為30,60和90(3種壽命狀態樣本各10,20和30個)。采用本文方法交叉驗證壽命狀態識別結果如表2所示,其中“/”前后數據表示工況1、工況2分別為源域訓練集時的識別率。
由表2可知,首先,本文方法對不同工況滾動軸承壽命狀態識別切實有效,識別率較高,最高達到93.33%;其次,訓練樣本的數量對識別率有較大影響,隨著訓練樣本數量增加,識別率也隨之增加。
為驗證本文改進的源域多樣本集成GFK較源域單樣本GFK識別率的優越性和一致性投票對識別率的提升作用,以工況1為源域訓練樣本,工況2為目標域測試樣本。設置訓練樣本數分別為3,6,…,87和90,測試樣本數為30,源域多樣本數為1000.分別比較源域多樣本集成、源域多樣本平均和源域單樣本的識別率。其中,源域多樣本平均方法為將1000個源域多樣本訓練識別結果進行算術平均。不同源域樣本的識別率如圖4所示。
從圖4可以看到:源域單樣本數量對識別率影響不大,識別率比較穩定,但識別率較低,不高于80%;源域多樣本平均反映了識別率隨訓練樣本數變化的規律,大致呈正相關,但識別率仍不足90%;源域多樣本集成不僅反映識別率與訓練樣本數呈正相關的規律,而且通過充分利用源域數據信息提升了識別率,識別率最高達93.33%。
為證明本文方法較傳統機器學習方法在不同工況滾動軸承壽命狀態識別上的優越性,以工況1為源域訓練樣本,工況2為目標域測試樣本。設置訓練樣本數分別為3,6,…,87和90,測試樣本數為30,源域多樣本數為1000.分別比較SVM,KNN和本文方法在壽命狀態識別上的準確率。不同方法識別準確率如圖5所示。
由圖5可知,隨著訓練樣本數增加,本文方法識別率均高于SVM和KNN,且最高達到93.33%;KNN方法在不同工況滾動軸承壽命狀態識別有一定效果,但效果不佳;SVM識別效果最差,僅為33.33%,無法有效識別。可見,本文方法較傳統SVM,KNN方法對不同工況滾動軸承壽命狀態識別具有較大優勢。
為具體說明本文方法在不同工況下較SVM、KNN的識別優勢,分析各算法在訓練樣本數為60(3種壽命狀態各20),測試樣本數為30(3種壽命狀態各10),源域多樣本數為1000下3種壽命狀態識別結果,如表3所示。由表3可知,經過一致性投票集成后,SVM在磨合期和工作期識別錯誤,KNN在工作期識別完全錯誤(識別率為0),導致3種壽命狀態無法有效識別。本文方法對工作期的識別率為70%,因此可有效識別不同工況下的3種壽命狀態。
分析KNN在工作期識別率為0的原因,統計KNN算法在10個工作期壽命狀態樣本識別中的一致性投票得票數,如表4所示。
由表4可知,在1000次一致性投票過程中,KNN算法在工作期壽命狀態識別中每個樣本最高得票數均為磨合期。因此,一致性投票將其全部判斷為磨合期,故工作期壽命狀態10個樣本的識別準確率為0.SVM對工作期識別率為0的原因與KNN同理。
4.2 角接觸球軸承壽命狀態識別
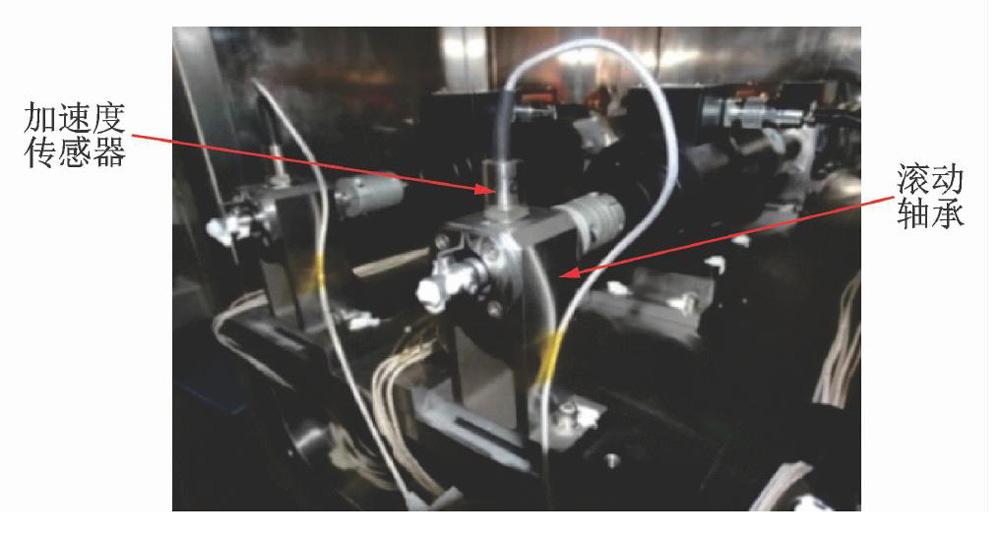
為驗證本文方法在不同型號軸承上的有效性,將方法用于角接觸球軸承數據下的壽命狀態識別。軸承型號為C36018,軸承節徑為15mm,滾動體個數為7,接觸角為15°。采集各壽命狀態下的軸承振動信號,振動信號采集裝置如圖6所示。
現有的在相同轉速、不同負載下運行相同圈數的3套同類型角接觸軸承,分別以T1,T2和T3表示,對應的軸承壽命狀態及狀態說明如表5所示。
相同運行圈數下,負載越大,壽命損耗越多。故表5中軸承對應3種不同壽命狀態,實際壽命損耗為T1
設置1kg載荷、1500r/min轉速的數據為源域數據,1kg載荷、1000與2000r/min轉速的數據為目標域數據。源域樣本增加會導致源域與目標域特征空間距離增加,應盡量減少源域樣本個數。本文采用無重復均勻隨機抽樣從每類樣本中分別抽取1,2和3個,即訓練樣本分別為3,6和9個。設置測試樣本數分別為30,60,90和120個。設置源域多樣本數為3000,采用本文方法對角接觸球軸承數據進行不同工況下滾動軸承壽命狀態識別,識別結果如表6所示,結果較好,識別率超過90%。
為具體說明本文方法在不同工況下較SVM、KNN的識別優勢,設置訓練樣本數9個,測試樣本數為120個,以1500r/min為訓練集,1000和2000r/rmin為測試集,計算T1,T2和T3三種壽命狀態的平均識別率及總平均識別率,結果如表7所示。
由表6-7結果可知,本文方法在角接觸球軸承壽命狀態識別中表現良好,總平均識別準確率達到90%。KNN和SVM方法識別率較差,KNN總平均識別率約為75%,SVM總平均識別率僅為33.33%。可見,本文所提基于遷移學習的壽命狀態識別方法在不同工況壽命狀態識別中比傳統機器學習方法表現更好。
5 結論
本文提出的源域多樣本集成GFK方法有效實現了不同工況下滾動軸承壽命狀態識別。利用多次無重復均勻隨機抽樣得到的源域多樣本充分利用源域數據信息,改善了源域單樣本遷移學習能力不足的問題,提升了識別準確率(平均識別率達90%);同時,所提方法相對于源域單樣本GFK算法和源域多樣本平均算法表現更好,識別率提高約10%。此外,一致性投票集成過程有效提升了識別結果的穩定性,避免了源域內部樣本選擇帶來的識別率差異問題。