信號系統在隧道防火災運行效率方面的應用
2020-07-23 06:22:00胡超林
今日自動化 2020年1期
關鍵詞:設置
胡超林
(浙江眾合科技股份有限公司,浙江杭州 310000)
1 區間風井的設計
目前,城市地鐵線路大部分采用地下線路設計,地下隧道中因地鐵隧道結構復雜、環境密閉、連通地面的疏散出口較少,一旦發生火災,很難及時救援、造成群死群傷等問題。對于較長的區間會在站臺外側區域及區間根據區間線路的長短設計若干個區間風井。站臺風機正轉送風,區間風機反轉吸風,從而讓隧道中的煙氣直接從風口吸入風道中,使其順著風亭排入地面。但為了實現運行的效率,在區間風井之間存在兩列車的下,當其中一列車發生火災時,另外一列車和發生火災的列車處于同一個風井區間,且發生火災列車的煙氣排放的方向上時,可能對未發生火災列車上的人員造成傷亡事故。為了解決這一問題,下面結合具體具備車站站形進行分析說明。
2 信號系統在設計中的應用
2.1 未考慮火災發生的設計
在如圖1所示的隧道線路中,車站01-車站02之間為過江隧道,此區間全長2.720 km,為防止因線路限速或列車故障在過江隧道停車時,當其中一列車發生火災,對于地鐵隧道線路中較長的區段,可能存在兩列及以上的列車運行時兩風井間有可能運行多于一列列車,信號系統通過ATS子系統彈性設置;由運營人員對車站01-車站02之間的隧道內兩個風井間是否運行一輛列車進行限制設置或取消。ATS系統默認開啟該區間兩風井之間僅允許一輛列車運行的功能。即當運營人員取消區間風井間列車運行限制設置時,系統按列車正常追蹤情況自動排列進路,允許多輛列車進入區間風井;當運營人員對區間風井間列車運行限制設置后,系統僅為一列車自動排列進路,允許該列車進入區間兩風井間,在前車未出清區間風井范圍前系統不會為后續列車自動排列進路,但人工排列進路功能不受該限制。這種設計限制了列車的運行效率,不能達到一般的120 s的運行間隔的要求。
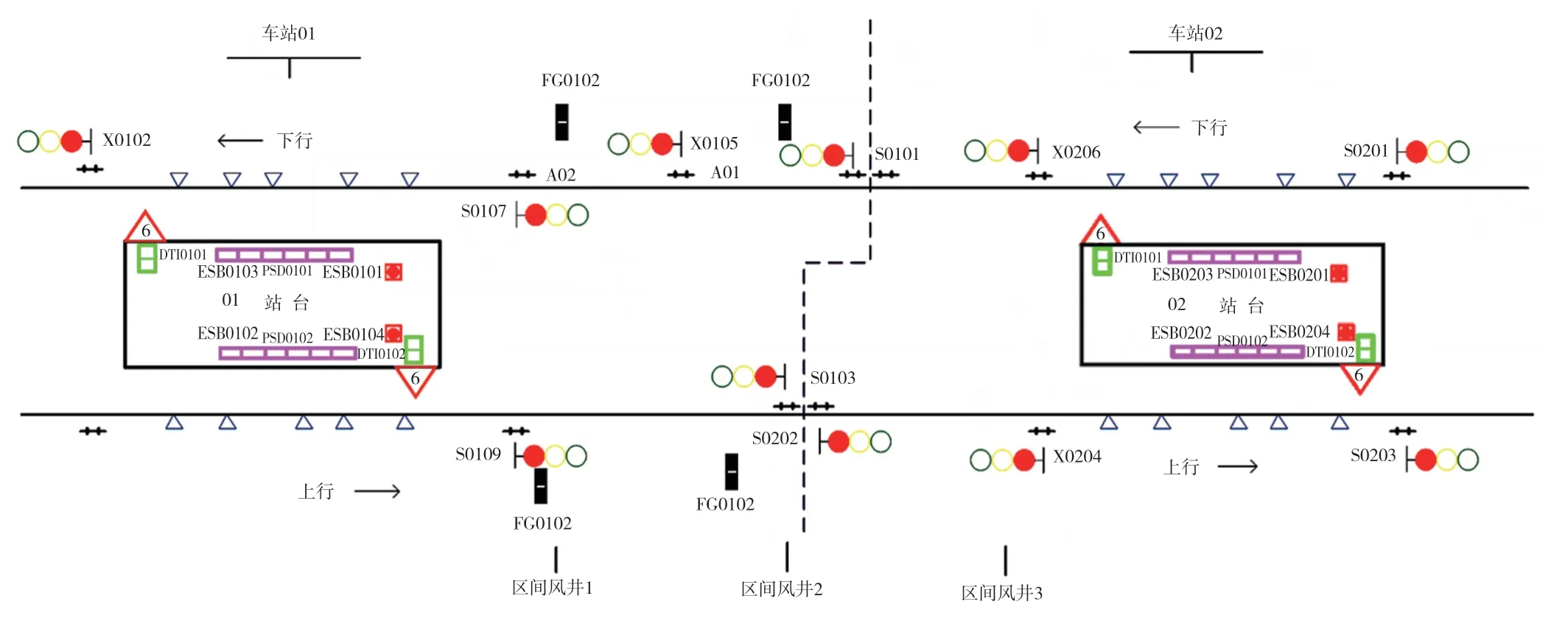
圖1 原設備布置圖
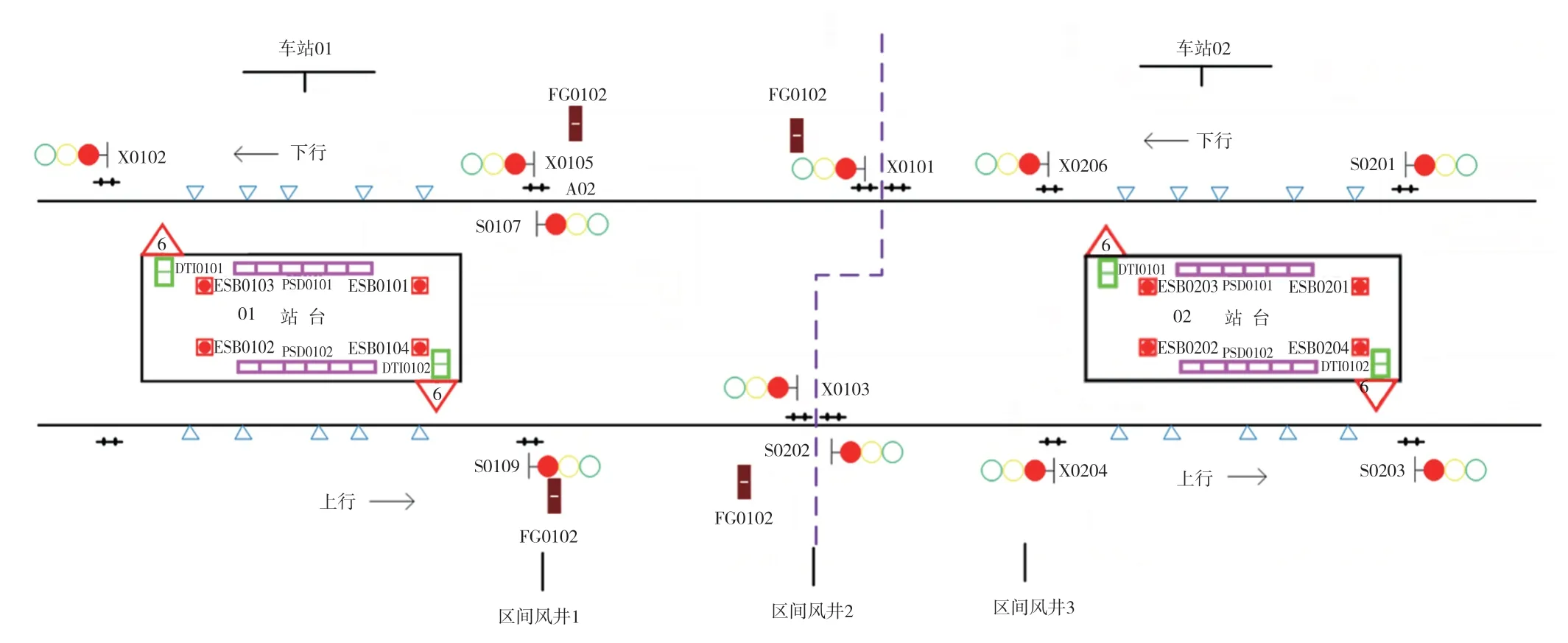
圖2 優化后的設備布置圖
2.2 優化設計方案
在車站01和車站02之間有3個區間風井時,為實現在ATS系統上彈性設置過江隧道內兩風井間僅允許一列車運行功能,通過將區間信號機X0105挪動至車站01的進站位置,即A02計軸處,同時刪除A01計軸(參考圖1)。設計改變后如圖2所示。
信號系統針對圖2中設備位置的調整,按進路進行設置列車運行的限制,確保在CBTC模式下進路自動觸發時,僅允許一輛列車進入兩風井之間。按圖2所示,車站02-車站01有3個風井,其中風井2為區間中間的風井。
(1)在列車運行下行方向時
風井1與風井2之間:ATS系統判斷當X0206->X0101進路內方有一輛列車時,不再自動請求開放X0206信號,防止后車進入該風井之間;
風井2與風井3之間:ATS系統判斷當X0101->X0105進路內方有一輛列車時,不再自動請求開放X0101信號,防止后車進入該風井之間。
(2)同樣,在列車運行上行方向時
風井3與風井2之間:ATS系統判斷當S0109->S0202進路內方有一輛列車時,不再自動請求開放S0109信號,防止后車進入該風井之間;
風井2與風井1之間:ATS系統判斷當S0202->S0203進路中有一輛列車占用時,不再自動請求開放S0202信號,防止后車進入該風井之間。
上述情況中,系統雖不會自動觸發進路,但在人工介入,并事先有事故預判的情況下,仍然支持人工手動排列進路。
2.3 功能說明
在地鐵線路的設計上,只對特殊線路條件下才做該特殊功能的設置。一般線路套件線路上列車運行數量限制按站間范圍生效,在車站02-車站01仍保留區列車運行數量按照站間控制的功能,當這兩站間同時設置兩種限制列車運行數量時,這兩種限制是同時生效,系統按照最嚴格的標準限制執行。
信號系統對上述風井之間的列車運行限制是通過進路的始端信號機進行設置,可分別獨立對處在每個風井間進路進行設置;信號系統默認開啟該區間兩風井之間僅允許一輛列車運行的這功能;當列車限制功能設置后,相應區間兩風井間進路僅允許一列車運行限制功能生效;當操作人員取消該設置后,區間風井間進路按正常追蹤邏輯自動請求,允許進入多輛列車進入同相鄰兩風井區間;因該操作命令為安全命令,操作人員在取消該限制的操作時,ATS系統對該操作按照安全命令處理,在操作指令下發后,界面會彈出口令確認窗口,需要操作人員輸入正確的數字口令后,取消設置方能生效。
2.4 風險分析
由于信號系統為非安全系統,上述方案中所描述功能通過ATS系統進行運行限制彈性設置,存在如下風險:
當ATS系統故障時,該功能的設置失效;當系統切換為LCW(本地控制工作站)控制時,進路仍會被人工、Fleeting(自動通過進路)請求開放,該功能設置失效;當該站間信號機被設置為Fleeting(自動通過進路)時,進路在滿足相應的聯鎖條件后,由聯鎖自動請求開放,該功能設置失效;當人工排列進路時,進路會開放,不受該功能限制。
在上述風險下,均有可能出現多輛列車進入兩個風井之間的情況,需要操作人員通過相關的制度保證,確保功能設置的有效性。當然信號系統在設計上也采取冗余處理,可靠性也有一定的保證。
3 運行能力計算
3.1 牽引計算結果
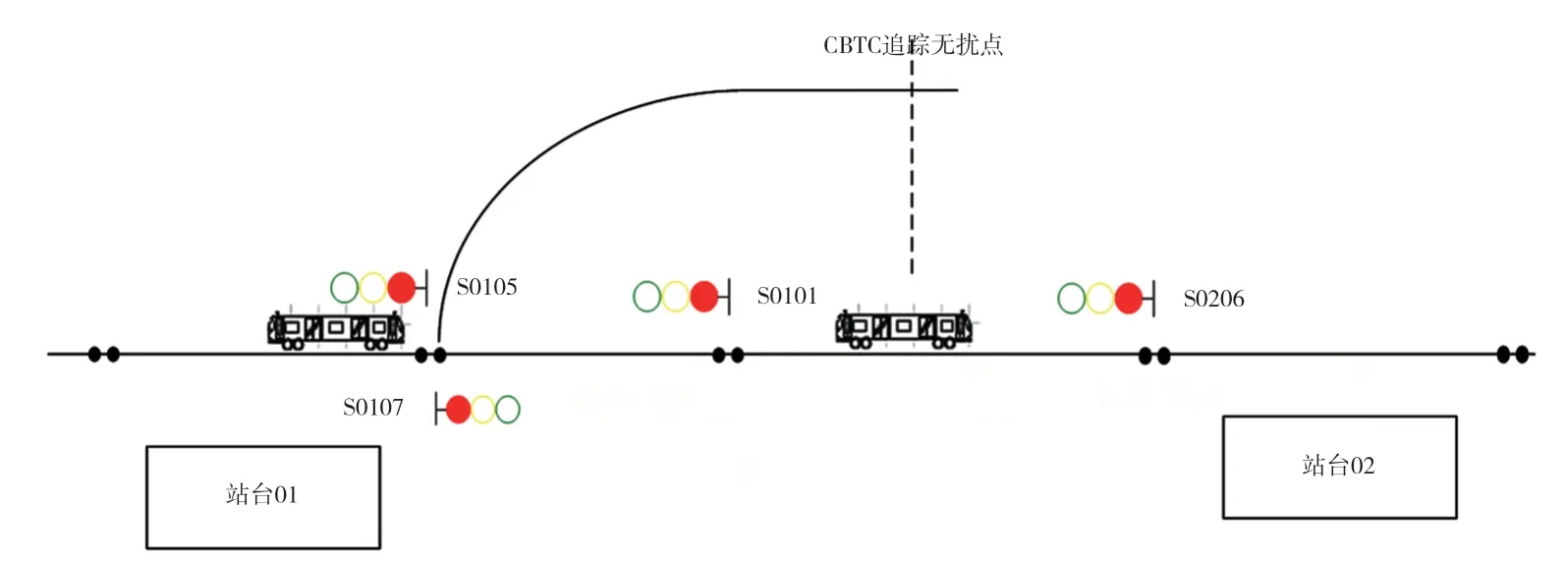
圖3 124.34s追蹤間隔示意圖
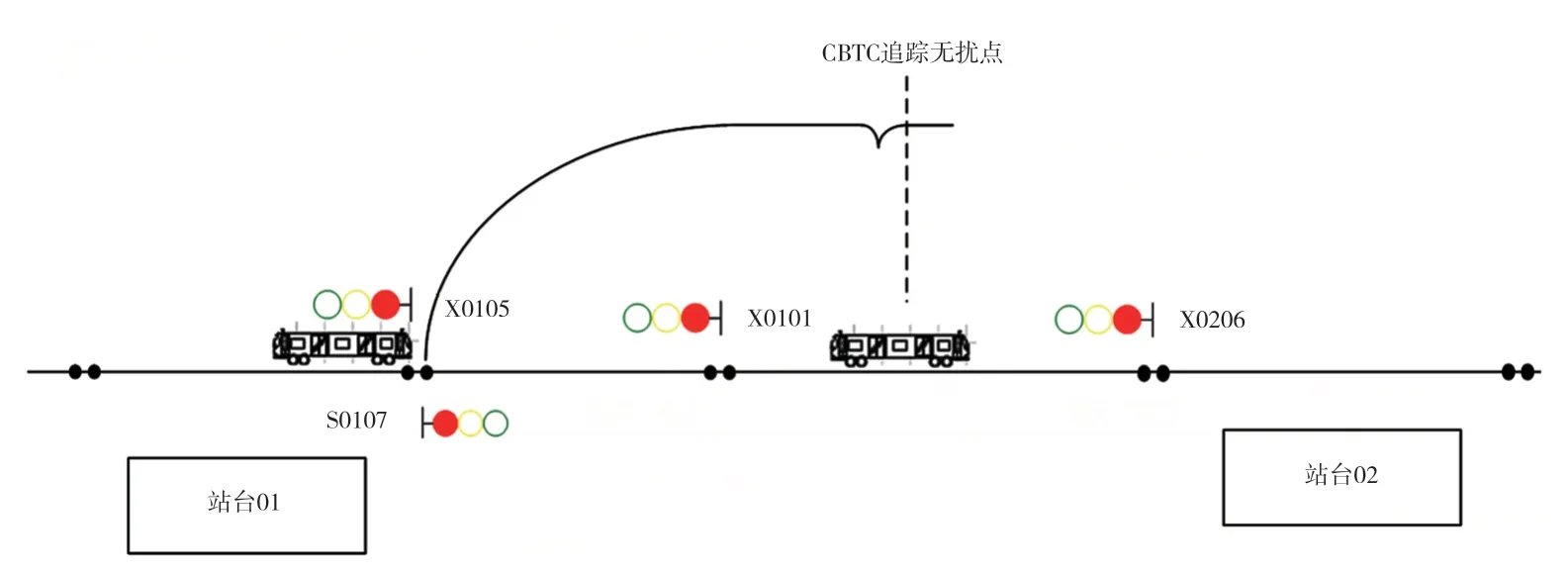
圖4 120s追蹤間隔示意圖
計算原理后車追蹤前車時,后車速度不受前車位置影響。如下圖所示,當前車駛出進路X0101-S0105時,后車運行至無擾點位置,后車的運行速度不受前車影響,如圖3所示。
根據能力分析仿真結果,對于CBTC追蹤間隔:過江隧道X0101-X0105進路中列車運行追蹤間隔為124.34s,大于CBTC最小設計追蹤間隔120s;對于點式ATP追蹤間隔:S0202-S0203(如圖2)進路為過江隧道四個進路中最大追蹤間隔,間隔為141.11 s,滿足點式ATP最小設計間隔153 s。
3.2 120 s間隔方案優化
計算原理:若要把全線最小列車追蹤間隔縮小至120s,可通過減小列車追蹤距離實現,當前車車尾駛出進路X0101-X0105時,后車追蹤前車已駛過無擾點位置,列車按照ATP速度曲線降速繼續運行5-6s,前車出清進路X0101-X0105進路后,后車移動授權MA向前延伸,列車加速運行,速度不再受前車影響。如圖4所示。
按照120s最小追蹤間隔,列車全線追蹤過程中,只有前車在進路X0101-X0105內時,后車運行速度受前車影響,線路其他位置追蹤不受影響。
3.3 運行圖影響
若編制間隔大于124.34 s的運行圖,后車運行速度可不受前車影響;若編制間隔為120 s的運行圖,前車運行在X0101-X0105進路內時,后車運行速度會受到前車影響,其他位置后車運行速度不受前車影響。
4 結束語
隧道風井是用于內減少火災事故影響的一個系統性的設計,信號系統在隧道防火災方面能夠通過控制列車的運行來降低該影響。但是,乘坐軌道交通是人們主要的出行方式之一,隧道乘坐人數的不斷增加,對運營效率的要求也越來越高。信號系統提供的解決方案可能會遇到瓶頸。要更解決這一問題是地鐵設計人員在設計初期需要考慮的系統性問題。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業后醫學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16