永磁同步電動機定子磁鏈對電機性能影響的研究
2020-07-31 06:19:50徐大利謝青海孟鳳果
時代農機 2020年5期
徐大利,謝青海,崔 嵬,王 濤,孟鳳果
(河北機電職業技術學院,河北 邢臺054000)
永磁同步電動機(PMSM)的矢量控制方式中,逆變器有兩種運行方式,分別是電流滯環控制方式和電壓空間矢量控制方式[1]。定子磁鏈對電動機的性能影響較大,不同的逆變方式,定子磁鏈表現不同,優良的定子磁鏈,會得到較好的電動機性能。
1 觀測PMSM 定子磁鏈
PMSM 的數學變量為[1]
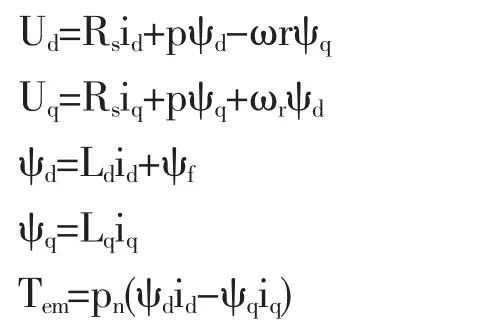
經過公式變換,得到PMSM 表達式為:
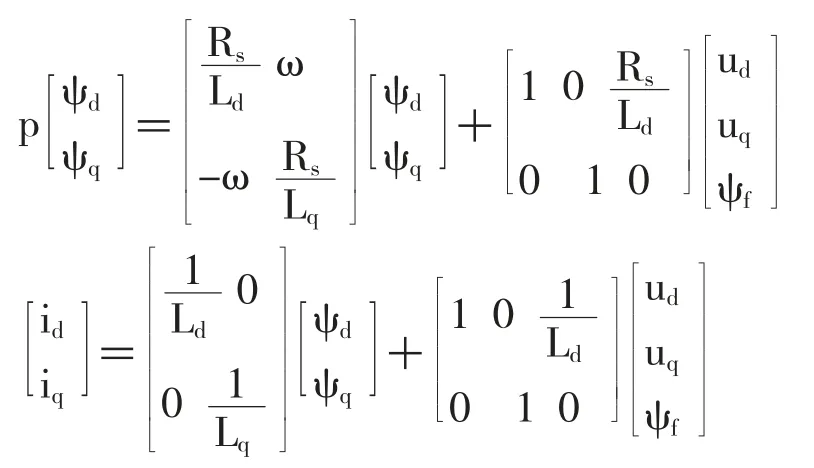
進一步變換公式,得到判別矩陣:
通過對永磁同步電動機矢量控制和電流滯環逆變控制的分析,在Matlab 中,建立數學模型如圖1 所示[4][5][6],用同樣的方法可以建立電壓空間矢量控制的數學模型。
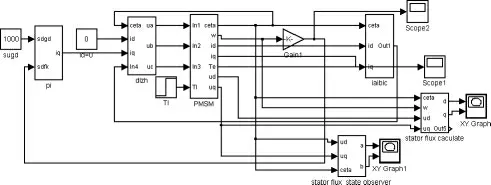
圖1 電流滯環逆變控制模型
2 實驗仿真分析
圖2 是電流滯環逆變控制方式下的電動機速度響應,圖3 是電壓空間矢量控制方式下的電動機速度響應。圖4 是電流滯環逆變控制方式下的電動機電磁轉矩響應,圖5 是電壓空間矢量控制方式下的電動機電磁轉矩響應。圖6 是電流滯環逆變控制方式下的電動機定子磁鏈響應,圖7 是電壓空間矢量控制方式下的電動機定子磁鏈響應。通過實驗結果對比我們發現,電壓空間矢量控制方式下電動機定子磁鏈明顯優于電流滯環逆變控制方式下的定子磁鏈,相應的,電磁轉矩性能也更好。

圖2 電流滯環跟蹤控制速度響應
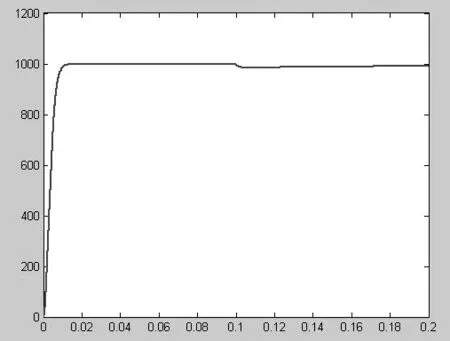
圖3 電壓空間矢量控制速度響應
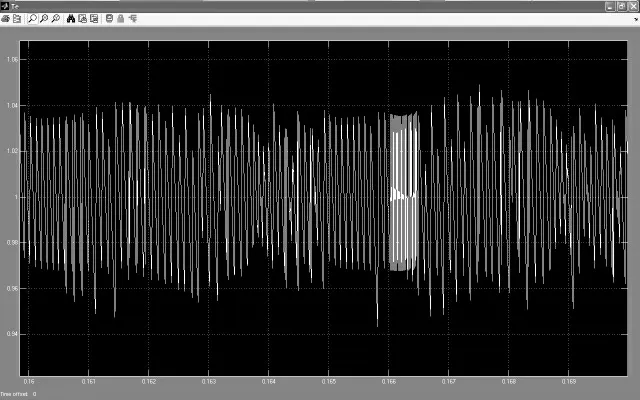
圖4 電流滯環跟蹤控制電磁轉矩響應局部
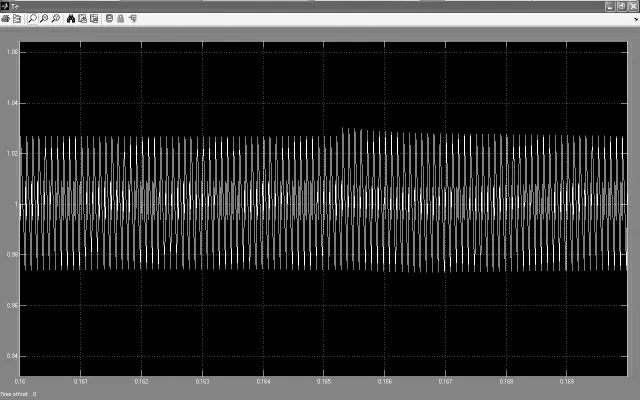
圖5 電壓空間矢量控制電磁轉矩響應局部
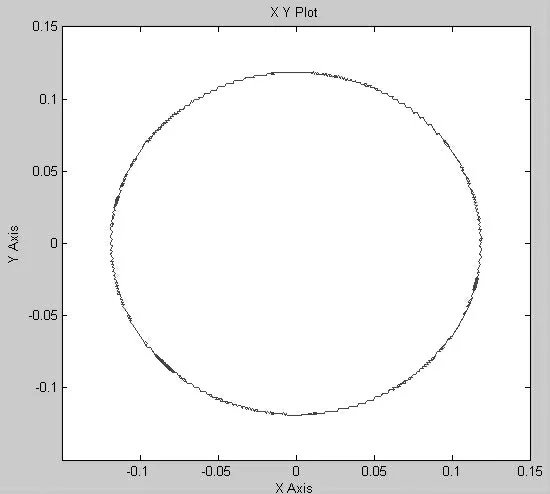
圖6 電流滯環跟蹤控制磁鏈
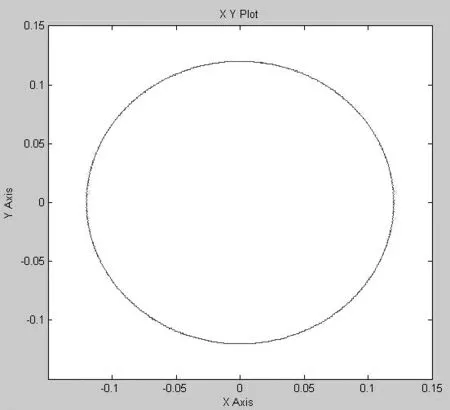
圖7 電壓空間矢量控制磁鏈
3 結 論
永磁同步電動機的定子磁鏈是可以觀測的。仿真實驗結果表明:優良的定子磁鏈,會得到較好的電動機性能。
