基于SURF 算法的MEMS 平面微運動測量
2020-08-28 05:40:56張瑞峰劉鐵根
自動化與儀表 2020年8期
趙 帆,桑 梅,王 雙,張瑞峰,劉鐵根
(1.天津大學 精密儀器與光電子工程學院,天津300072;2.天津大學 光電信息技術教育部重點實驗室,天津300072;3.天津大學 微電子學院,天津300072)
微機電系統MEMS(micro electro mechanical systems)是一種尺寸在微米量級的,涵蓋了傳感、處理、 執行等一種或多種功能在內的電子機械器件。對于含有機械可動部件的MEMS 傳感器、執行器來說,其工作狀態下的動態特性可以直接揭示出器件性能的優劣。 因而在MEMS 器件的設計及加工過程中,對器件進行動態特性檢測,有助于優化設計,改進工藝,提高器件性能和良品率,對于MEMS 的設計和加工制造具有重要意義[1]。
1 MEMS 器件動態特性檢測方法的研究
由于MEMS 器件普遍具有尺寸小和諧振頻率高的特點,其動態性能通常采用激光多普勒測振儀LDV(laser doppler vibrometer)進行測量與分析[2],然而該方法成本較高,且只能對MEMS 動件的離面振動特性進行測量,而無法對其面內運動特性進行測量。
針對MEMS 器件的面內運動特性檢測,國內外有許多的研究人員開展了工作。 文獻[3-4]設計了基于光纖F-P 干涉微位移傳感原理的MEMS 面內運動測量系統,但測量的頻率范圍較低,難以滿足高頻振動測量的應用場景;文獻[5]結合了頻閃成像及亞像素模板匹配法測量面內微運動,但圖像處理算法時間復雜度較高,難以實現實時測量;文獻[6]設計了基于光流法的MEMS 面內測量算法,但當測量物體亮度出現變化時會產生較大的測量誤差;文獻[7]設計了基于視覺算法的圖像邊緣特征提取法,該算法運行速度快但精度較低;文獻[8]設計了基于同態濾波的微運動測量算法,但是當圖像尺寸較大時算法對計算機算力的要求較高。
針對上述問題,在此提出一種基于特征點檢測的面內微位移測量方法。 通過對MEMS 器件的頻閃圖像進行特征點檢測與匹配,利用特征點對的統計規律對MEMS 的面內位移進行表征;搭建了一套頻閃微視覺系統,對測量算法進行測試驗證。 試驗結果證明了該測量方法不僅具有較高的測量精度,還具有較高的穩定性與運行效率,可以快速準確地對MEMS 的面內運動進行測量。
2 MEMS 面內運動的解調方法
2.1 頻閃微視覺頻閃圖像采集
由于MEMS 器件普遍具有自身尺寸小,振動幅度小,振動頻率高等特點,用普通的成像方法難以捕捉其清晰的動態圖像,因此需要借助頻閃微視覺技術來獲取其在一個周期內的運動組圖[3]。 頻閃微視覺系統主要由LED 頻閃光源、金相顯微鏡、圖像采集模塊構成,如圖1 所示。
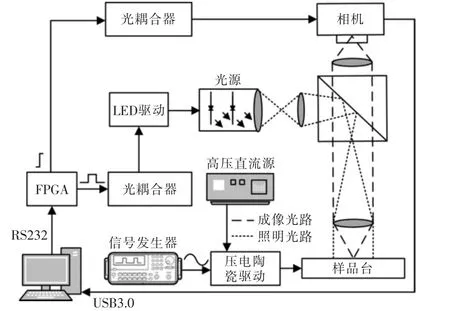
圖1 頻閃微視覺系統框圖Fig.1 Block diagram of stroboscopic micro-vision system
頻閃光源由FPGA、LED 驅動電路和一個波長為480 nm 的大功率LED 等3 個部分組成。 FPGA輸出一路具有相位延遲的頻閃種子脈沖信號和一路控制相機曝光的觸發信號。 其中,頻閃種子脈沖經過驅動電路放大后,驅動LED 發出具有相位延遲的頻閃光脈沖。 金相顯微鏡配備平場消色差物鏡,放大倍數為20 倍。 圖像采集使用2000 萬像素高分辨率CMOS 工業相機,將圖像信號實時發送到計算機,使用特征點算法進行面內位移分析。
在黑暗環境當中,使用頻閃光源發出一束脈寬遠小于MEMS 振動周期的窄脈沖光,對MEMS 表面照明,此時將在相機感光片上呈現清晰的MEMS 圖像。 當MEMS 振動頻率足夠快時,閃光脈沖將變得非常窄, 此時單次閃光無法達到清晰成像的條件。因此在已知MEMS 振動頻率的情況下,使用頻閃光源對放置于黑暗環境下的MEMS 進行周期性頻閃補光, 控制頻閃周期與MEMS 運動周期嚴格相等,這樣可以使MEMS 在每次受到照明時都處于相同的振動相位,即將MEMS 的振動“凍結”在當前相位,如圖2 所示。

圖2 控制信號時序圖Fig.2 Control signal timing diagram
經過一系列的頻閃補光,工業相機就可以捕捉到清晰的MEMS 圖像,而后使頻閃脈沖做ΔΦ 的相位延遲,可以捕捉到下一相位的運動圖像。 重復此過程, 直至捕捉到一個周期的振動瞬間圖像序列,從而將高頻振動的MEMS 振動轉換為一組靜態的運動組圖,以便于使用位移檢測算法進行位移解調。
2.2 基于特征點匹配的面內位移解調算法
特征點檢測法包括SIFT[9]、SURF[10]和ORB[11]等。其中,SIFT 算法特征點定位精度最高,但運算耗時最長;ORB 算法運算耗時最少,但其特征點對微小位移不敏感,定位精度難以達到位移測量的要求;SURF 算法在保證精度的情況下,運算速度較SIFT提升10 倍。 故在此采用基于SURF 的特征匹配方法,對MEMS 的面內運動做到快速、精準的測量。
在面內位移的過程中,選取觀察范圍使得運動部件在圖像內的部件做整體移動,在均勻的光照條件下, 使圖像中各個像素產生的位移應當是相同的。在此采用基于SURF 的特征點檢測算法,對運動圖像序列中相鄰的2 幅圖進行特征點求解與匹配,然后使用RANSAC[12]模型去除匹配中可能存在的誤匹配點, 計算出各特征點在相鄰圖片中的位移,進而得出運動目標整體位移的統計結果。 面內位移測量算法的流程如圖3 所示。
由于這里的若干對匹配點都是對同一段位移的表征,因此可以將他們視為對同一段位移的若干次測量,所以各自得出的位移應當遵守正態分布規律。 為進一步減小結果的誤差,在此依據3σ 法則,將位移殘差超過3 倍標準差的位移匹配結果,視為粗大誤差予以去除,然后重新計算標準差,繼續依據3σ 檢測粗大誤差,……,循環該過程進行迭代,直至結果中不包含粗大誤差,再計算其均值,以此作為最終的位移測量結果進行輸出。
3 試驗結果與分析討論
3.1 模擬試驗
基于所提出的面內微位移解調方法,首先采用模擬試驗來測試算法的亞像素精度。 先選取1 幅MEMS 薄膜局部結構的圖像作為參考圖, 分辨率為600×400。 使用三線性插值的方法,將圖像的分辨率沿水平方向放大10 倍, 而后將整個圖像沿水平方向平移1 個像素,再將平移后的圖像沿水平方向縮小到源圖像的分辨率,得到將圖像沿水平方向平移0.1 個像素的模擬樣本。將參考圖像沿X 軸以0.1 像素的步長平移100 步,共計移動10 個像素,得到一組位移圖像,以此作為測量的模擬樣本。

圖3 面內位移測量算法Fig.3 Algorithm of in-plane displacement measurement
接下來使用位移測量算法對其進行檢測,將每一步的測量結果與之前的測量結果相疊加,得到相對于原圖像的位移, 而后將測量結果進行線性擬合,得到擬合結果。 試驗數據如圖4 所示。

圖4 亞像素位移測量結果Fig.4 Sub-pixel displacement measurement results
由試驗數據可得,測量結果的均方根誤差為0.009 像素,為設定參數的9%;擬合直線的R2為0.99995。
3.2 實際位移測量
試驗采用周期信號驅動精密PZT 位移臺產生面內位移,通過頻閃微視覺顯微系統采集MEMS 的位移圖像信號進行實際測量,位移臺的精度為±10 nm。試驗中,首先用標定尺得到40 倍物鏡下,每個像素所代表的實際距離為120 nm。 然后, 以歌爾聲學MEMS 薄膜結構的一部分為檢測對象, 使位移臺帶動MEMS 按照固定的步長移動10 步, 用工業相機在金相顯微鏡下采集每步移動后的圖像。 采用SURF 匹配算法對采集到的位移圖像進行分析,在設定步長分別為15,30,50,100 nm 的距離下,得到相對于初始位置的位移量。 測量結果如圖5 所示。
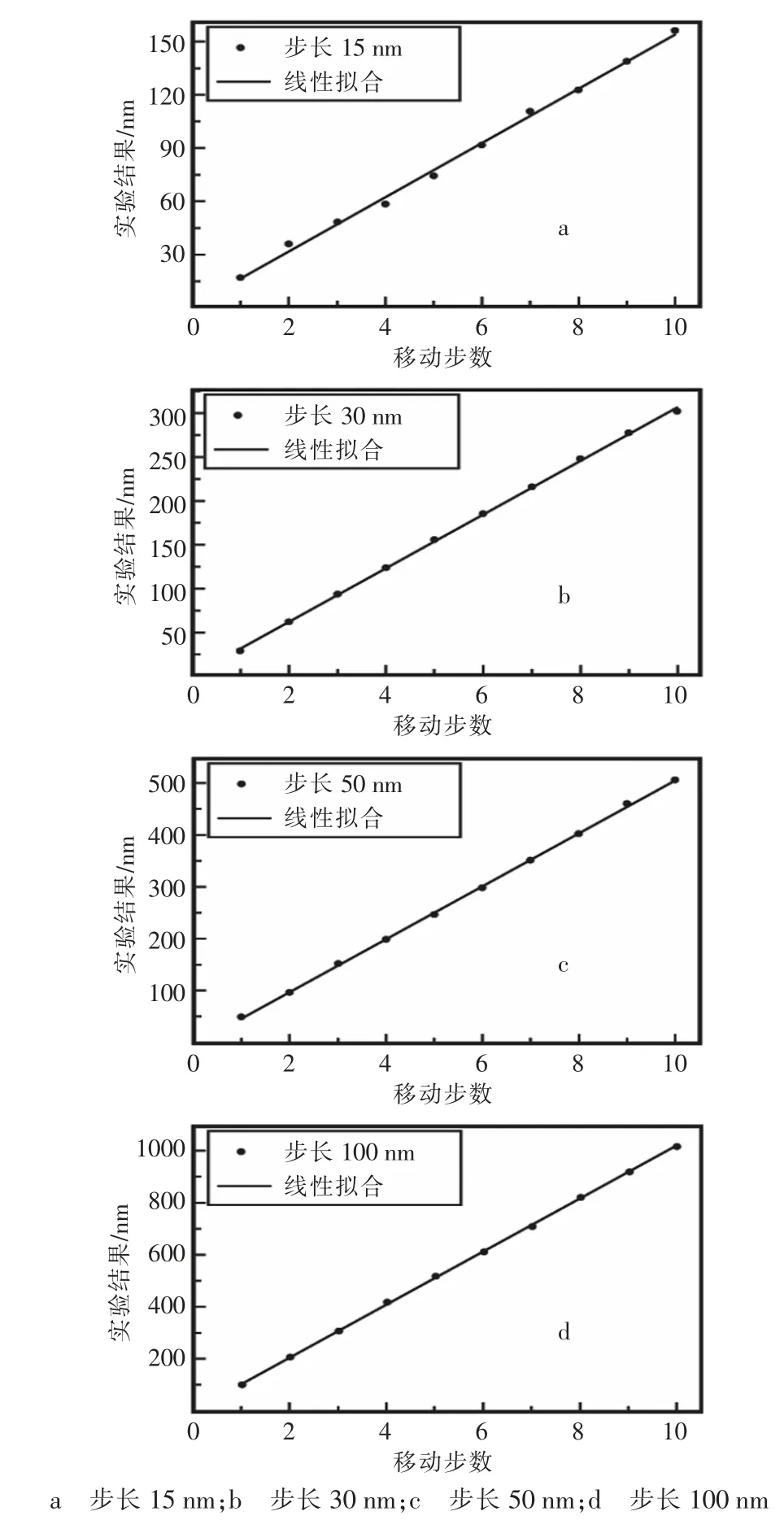
圖5 實際位移的測量結果Fig.5 Actual displacement measurement results
測量結果中的平均絕對誤差MAE(mean absolute error)和均方根誤差RMSE(root mean square error)見表1。
在此以50 nm 的面內位移為例, 理論上對應圖像中0.39 像素,分析測量結果中特征點對的殘差分布。 采用相機記錄位移前后的圖像,使用算法進行分析,其結果中所有特征點對的測量結果殘差分布如圖6 所示。

圖6 殘差分布的對比Fig.6 Residual distribution contrast
圖中,最初的測量樣本均值為0.396 像素,標準差為0.158 像素。依據3σ 法則將其中殘差大于3 倍標準差的數據點去除后, 得到的樣本均值為0.391像素,標準差為0.101 像素。由于采取的位移臺移動誤差為±10 nm,理論上可以確定該系統的精度可以達到100 nm 量級。 可以看出,去除粗大誤差使得測量結果更貼近設定的參數,測量的結果分布更加集中,進一步減小了測量誤差。
3.3 MEMS 面內運動解調
使用振動陀螺儀進行面內振動解調的測試。 其陀螺儀的的振動頻率為3.16 kHz,振幅6 μm,工作在正弦運動模式, 使用頻閃微視覺系統采集MEMS薄膜在1 個周期內的運動圖像。 陀螺儀的局部圖像如圖7 所示。

圖7 MEMS 陀螺儀局部圖像Fig.7 Local image of a MEMS gyroscope
在1 個周期內等相位間隔地采集100 幅頻閃圖像,然后使用面內測量算法對圖像序列的位移進行解調,得出其1 個周期內的運動參數,并且繪制出每個相位特征點分布的誤差帶。 其中,對圖片序列進行分析得到MEMS 的速度測量結果和擬合參數,然后標出特征點檢測的誤差限。 位移測量結果如圖8 所示。

圖8 位移測量結果Fig.8 Displacement measurement results
可以看出, 由于外界環境振動引入的噪聲,使得采集的圖像中含有一定的誤差。 當器件的運動速度較快時,測量結果的均方根誤差也會較大,這是由于速度較快時采集的圖像邊緣會產生一定的模糊導致的。 由擬合結果可見,測量結果與待測目標的面內運動參數有較高的一致性。
4 結語
針對高精度MEMS 面內運動檢測的需求,結合MEMS 面內振動以及頻閃微視覺系統的特點, 提出了基于特征點匹配的面內振動檢測方法,搭建了頻閃微視覺系統, 完成了MEMS 器件的面內運動測量。 通過模擬試驗及實地測量,特征點匹配算法對MEMS 面內運動測量精度可以達到亞像素級別,整體系統的位移分辨能力可以達到100 nm,測量結果具有較高的可信度, 與理論值具有良好的一致性,可以滿足高精度面內運動檢測的要求,為MEMS 器件的設計、加工、出廠檢測提供重要參考。 該方法可應用于其他以一維運動為主要特征的MEMS 器件,是一種簡單有效的MEMS 器件面內運動測量方法。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
