基于3D打印技術的B737襟翼展開模型設計
2020-08-28 17:15:25楊天賀
機電信息 2020年24期

摘? 要:復雜的結構導致飛機維修困難且耗時,有時還會受限于零部件,導致飛機無法及時維修。近年來,隨著科技創新發展,3D打印技術在某些簡單制造行業已獲得成功應用。而在航空業,3D打印技術也在不斷探索與推進,如果能夠成功應用,那么對于航空制造業而言將是一次劃時代的變革。現選取B737襟翼為3D打印模型,從結構系統和控制系統兩大部分出發,通過3D打印技術打印出B737襟翼模型,模擬襟翼的收放,并從設計思想和運動狀態兩點對收放分別進行了探究。
關鍵詞:3D打印技術;B737;模型設計;襟翼展開
1? ? 3D打印技術的應用與可靠性
1.1? ? 3D打印技術在航空航天上的應用
在航空航天領域,美國是當之無愧的先行者,例如Optomec Design公司對故障的飛機發動機零件基于新件打印進行修復,效果顯著。此外,波音公司也緊隨其后,用3D打印技術打印出了飛機上大約300個不同的零部件。NASA的航天研究中心還對打印出的火箭發動機噴嘴進行了高溫點火實驗。除了以上兩個領域外,3D打印技術在工業制造、食品生活、軍工武器等方面都有所應用并且潛力巨大。
1.2? ? 3D打印技術的可靠性
3D打印技術可以節省材料,提高材料利用率。用其替代傳統的生產線,可以小量生產,降低成本;能夠對精度和復雜程度較高的零部件進行制造;能夠直接通過CAD和Pro/E等計算機輔助設計軟件將圖形轉化為實物;而且分布式生產的特點決定了它能夠隨打隨取,生產速度快,平面圖紙到實物在短短幾小時內就可以完成。此外,組裝好的產品也可以進行打印,因此降低了組裝成本。
在航空方面的應用,難度在于航材打印材料的研發,既要滿足材料強度和剛度的要求,同時又要可以應用在3D打印機上,這樣才能保證打印出來的組件可以直接用作航空維修的配件。但是隨著科技進步,未來的發展方向必然趨向于3D打印技術的應用,該技術的逐漸成熟將引發時代的變革。
2? ? B737襟翼展開模型設計思想
襟翼在飛機起飛和降落時都應該是處于展開狀態的。起飛時展開是因為展開的襟翼增加了機翼面積,從而達到了增加升力的效果。降落時展開襟翼是為了降低飛機的著陸速度,增大阻力,從而能夠快速地使飛機進行減速。
因為條件有限,所以采用樹脂粉末材料進行打印。可以觀察到打印是從最底層逐漸向上進行疊加,最終完成整個襟翼的打印,打印完成后會殘留一些原材料,可以進行回收利用。
襟翼的各部分是分開打印出來的,打印好之后需要進行組裝。主要是搖臂和連桿的連接,連桿和襟翼的連接,組件之間打孔由中心軸連接。
3? ? 展開模型
展開模型主要是從以下兩方面進行的:
3.1? ? Pro/E繪圖結構設計
利用3D打印制造模型,首先要利用計算機輔助設計軟件Pro/E進行產品的圖紙設計,然后將電腦與3D打印機連接,將數字信號轉換成模擬信號進行3D打印。
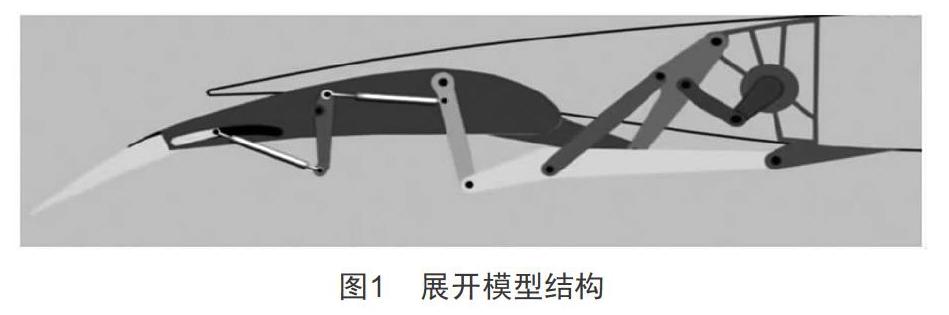
在制圖之前,首先在圖紙上進行了襟翼模型的圖紙繪畫,對襟翼各部分尺寸的大小進行初步的設計并在圖紙上進行尺寸標注,例如每層襟翼的厚度、寬度,襟翼弧線的彎曲弧度。因為B737的后緣襟翼是雙開縫式襟翼,在設計時要注意各級襟翼尺寸的契合度,確保能夠自由安全地展開。
設計大體如圖1所示。
3.2? ? 襟翼的展開形態
雙開縫式襟翼的展開形態共有三種,即Ⅰ級形態、Ⅱ形形態、Ⅲ級形態,分別對應的是襟翼的三種不同展開程度,Ⅰ~Ⅲ展開面積逐漸變大。
Ⅰ級展開:電控系統首先啟動,給電動馬達傳遞展開襟翼的電信號,接收到信號的電動馬達開始啟動,馬達直接帶動鋼索進行收放,鋼索會驅動搖臂推動襟翼進行初步展開,這一階段各層襟翼展開1/3。
Ⅱ級展開:在Ⅰ級展開的基礎上,作動筒繼續做功推動搖臂。值得注意的是,第一層的襟翼在正常情況下有一部分是收在機翼主體的下方空腔里面的,第二層則是在第一層里面。當襟翼展開時,機翼主體下方的搖臂連桿推動第一層襟翼進行展開,第一層的展開會促使與之相連的第二層搖臂進行搖動,然后推動第二層襟翼展開。
第二層展開需要用到滑軌和支架滾輪,在展開時搖臂會推動滾輪,滾輪在滑軌內進行滾動,此時各層襟翼展開2/3。
Ⅲ級展開:將各層襟翼全部展開,此時飛機的升力達到最大,一般在飛機起飛和降落時才會進行Ⅲ級展開。
4? ? B737襟翼展開的仿真模型
在經過前期的大體設計之后,用3D打印機打印出了襟翼的各部分實物,包括每一層的襟翼以及襟翼之間連接所用的連桿和搖臂。對于控制系統的組成,選取了電機、齒輪、搖臂和金屬連桿等;控制系統中還設置了轉速控制器,利用轉速控制器,可以自由控制襟翼的收放速度。模型的成品圖如圖2所示。
4.1? ? 機械部分
實物的展開模型是基于理論基礎設計的。襟翼共兩層,是雙縫后退式襟翼,第一層襟翼與控制系統的金屬連桿連接固定,連桿可以直接帶動第一層襟翼進行展開。第二層與第一層之間通過兩根連桿相連接,兩連桿之間通過緊固件進行固定,從而傳遞力的作用。第二層與第一層的連桿連接固定,因為第一層襟翼的兩側有滑軌,所以第二層通過搖臂在滑軌之間的伸展動作達到展開的目的。
4.2? ? 控制部分
控制部分主要分為四部分:電機、齒輪系統、搖臂連桿機構、轉速控制器。此處選擇了12 V的電機,最高轉速45 r/min,連桿的行程為2~8 cm。電機啟動后,內部轉子轉動帶動齒輪,齒輪與搖臂相連,帶動搖臂進行360°的旋轉,搖臂再和連桿連接,搖臂轉動180°,則連桿完成一個襟翼的展開動作。轉速控制器通過輸入、輸出線直接和電機相連,通過旋轉調節旋鈕改變電機功率,從而改變連桿的行程速度。
5? ? 結語
本文對B737的襟翼展開做了模型仿真,設計了襟翼各部件,并對聯動結構和方式進行了講解,分別從結構系統和控制系統對展開方式下各部件運動狀態進行了觀察和記錄,最終基于理論分析完成了實物設計。
[參考文獻]
[1] 魯遙,屈宗源.某型飛機襟翼控制系統分析與改進措施[J].液壓氣動與密封,2014,34(5):38-40.
[2] 魏偉,張元卿,何瑞,等.大型民用飛機后緣襟翼運動設計研究[J].科技視界,2018(9):132-133.
[3] 李元元,殷鵬剛,張聯合,等.基于數值法的某型飛機內襟翼運動機構設計[J].計算機測量與控制,2014,22(11):3767-3769.
收稿日期:2020-06-12
作者簡介:楊天賀(1985—),女,吉林梨樹人,講師,研究方向:飛機結構及維修。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
汽車實用技術(2020年16期)2020-09-06 13:28:22
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2019年20期)2019-12-13 08:26:11
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
