基于S型曲線加減速的機(jī)器人圓弧軌跡規(guī)劃與仿真
2020-08-31 05:41:24丁猛張中輝劉蔚釗
機(jī)電信息 2020年18期
丁猛 張中輝 劉蔚釗

摘要:軌跡規(guī)劃算法在機(jī)器人控制中的地位十分重要,其優(yōu)劣會(huì)直接影響機(jī)器人的運(yùn)動(dòng)速度、精度以及平穩(wěn)性。結(jié)合康尼公司設(shè)計(jì)的KNT-ESR6B機(jī)器人,針對(duì)傳統(tǒng)加減速算法的運(yùn)動(dòng)加速度突變所造成的機(jī)器人運(yùn)動(dòng)抖動(dòng)問(wèn)題,提出了基于S型曲線加減速的空間圓弧軌跡規(guī)劃算法,并在Matlab平臺(tái)進(jìn)行了仿真實(shí)驗(yàn)。
關(guān)鍵詞:機(jī)器人;軌跡規(guī)劃;S型曲線;圓弧插補(bǔ)
0? ? 引言
從規(guī)劃空間上可將機(jī)器人軌跡規(guī)劃分為兩種,即關(guān)節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃。在工業(yè)生產(chǎn)中,機(jī)器人運(yùn)動(dòng)軌跡幾乎都是直線和圓弧軌跡的組合[1],特別是在一些對(duì)機(jī)器人運(yùn)動(dòng)軌跡有著嚴(yán)格要求的工業(yè)現(xiàn)場(chǎng),如噴涂、焊接、打磨等,其圓弧軌跡規(guī)劃的平滑度直接決定了機(jī)器人的運(yùn)動(dòng)性能,所以軌跡規(guī)劃算法在機(jī)器人控制中的地位十分重要。
本文以南京康尼公司自主研發(fā)的KNT-ESR6B型六自由度機(jī)器人為研究對(duì)象,基于S型曲線加減速對(duì)其空間圓弧插補(bǔ)軌跡規(guī)劃進(jìn)行了研究,并在Matlab平臺(tái)對(duì)其進(jìn)行了仿真驗(yàn)證,結(jié)果表明,機(jī)器人的圓弧運(yùn)動(dòng)軌跡平滑,各關(guān)節(jié)加速度平緩,滿(mǎn)足應(yīng)用要求。
1? ? KNT-ESR6B機(jī)器人
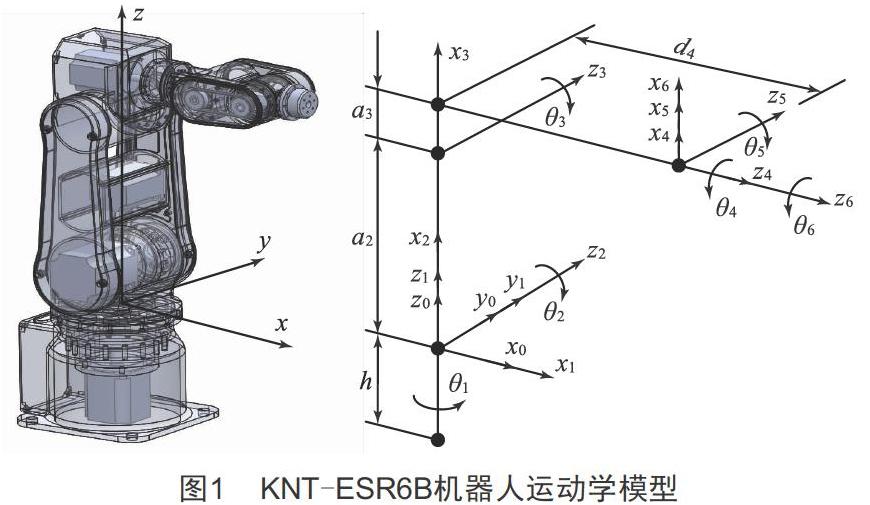
KNT-ESR6B機(jī)器人由機(jī)械本體和控制系統(tǒng)兩部分組成,機(jī)器人本體的6個(gè)關(guān)節(jié)由交流伺服電機(jī)驅(qū)動(dòng),從而實(shí)現(xiàn)機(jī)器人的運(yùn)動(dòng);其控制系統(tǒng)則采用了“PC機(jī)+DSP運(yùn)動(dòng)控制卡”的開(kāi)放式控制模式來(lái)設(shè)計(jì)。根據(jù)連桿坐標(biāo)系的規(guī)則建立了KNT-ESR6B機(jī)器人運(yùn)動(dòng)學(xué)模型,如圖1所示。
通過(guò)相鄰連桿坐標(biāo)系之間的關(guān)系變換矩陣,即公式(1),可得KNT-ESR6B機(jī)器人各相鄰連桿之間的變換矩陣,由此可以推導(dǎo)出機(jī)器人正向運(yùn)動(dòng)學(xué)和逆向運(yùn)動(dòng)學(xué)公式。
2? ? 基于S型加減速曲線的空間圓弧插補(bǔ)算法
2.1? ? 機(jī)器人空間圓弧插補(bǔ)
機(jī)器人空間圓弧插補(bǔ)算法比較復(fù)雜,其解決思路是將空間圓弧轉(zhuǎn)化到平面中進(jìn)行處理[2],如圖2所示,已知機(jī)器人工作空間中圓弧的起點(diǎn)P1(x1,y1,z1)、中間點(diǎn)P2(x2,y2,z2)和終點(diǎn)P3(x3,y3,z3),具體插補(bǔ)步驟如下:
(2)求坐標(biāo)變換矩陣。以O(shè)1(p0)為原點(diǎn),圓弧所在平面M的法向量a為O1Z1軸,向量■為O1X1軸,根據(jù)右手定則建立新坐標(biāo)系O1-X1Y1Z1,其中O1Z1軸在基礎(chǔ)坐標(biāo)系O-X0Y0Z0中的方向余弦即為法向量a,由公式(3)平面M的方程可求得法向量a:
最后由右手定則可知,O1Y1軸的法向量o=a×n,所以利用新坐標(biāo)系O1-X1Y1Z1的各軸在基礎(chǔ)坐標(biāo)系O-X0Y0Z0中的方向余弦向量,就可建立變換矩陣:
所以對(duì)于基礎(chǔ)坐標(biāo)系中的任意一點(diǎn)0p=(0px,0py,0pz)都與新坐標(biāo)系中與之唯一對(duì)應(yīng)的點(diǎn)1p=(1px,1py,1pz)來(lái)表示,兩者之間的轉(zhuǎn)換過(guò)程如式(10)所示:
(3)在新坐標(biāo)系中計(jì)算各插補(bǔ)點(diǎn)的坐標(biāo)值,然后將空間圓弧軌跡上各插補(bǔ)點(diǎn)坐標(biāo)值從新坐標(biāo)系O1-X1Y1Z1轉(zhuǎn)換到基礎(chǔ)坐標(biāo)系O-X0Y0Z0中。如圖3所示,在新坐標(biāo)系O1-X1Y1Z1的X1Y1平面中確定插補(bǔ)角大小,即:
在公式(11)中,由于用到了atan2(x,y)函數(shù),該函數(shù)本身具有預(yù)先判斷目標(biāo)點(diǎn)所在象限的功能,會(huì)對(duì)角度θ進(jìn)行處理,所以不再需要對(duì)插補(bǔ)的方向和過(guò)象限進(jìn)行判斷。
設(shè)在機(jī)器人插補(bǔ)周期T內(nèi),每次插補(bǔ)角度增量為Δθ,則插補(bǔ)的次數(shù)N=θ/Δθ+1(N四舍五入取整數(shù)),根據(jù)公式(12)可求出軌跡中每個(gè)插補(bǔ)點(diǎn)1pi=(1pix,1piy,1piz)所對(duì)應(yīng)的坐標(biāo)值,即:
最后根據(jù)公式(12)將平面圓弧的每個(gè)插補(bǔ)點(diǎn)坐標(biāo)通過(guò)轉(zhuǎn)換矩陣映射到基座標(biāo)系中,再由逆向運(yùn)動(dòng)學(xué)公式求出軌跡上插補(bǔ)點(diǎn)所對(duì)應(yīng)的關(guān)節(jié)角度[3],驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)到相應(yīng)的角度位置,就可以完成空間圓弧的軌跡規(guī)劃。
2.2? ? S型加減速曲線
S型加減速將T型加減速的3段過(guò)程拓展為7段,如圖4所示,即由加加速段、勻加速段、減加速段、勻速段、加減速段、勻減速段、減減速段組成,可使速度曲線更加趨于平滑,減小電機(jī)突然啟動(dòng)時(shí)的沖擊和機(jī)器人關(guān)節(jié)機(jī)構(gòu)機(jī)械振動(dòng),保證機(jī)器人運(yùn)動(dòng)的平穩(wěn)。
在圖4中,t為時(shí)間坐標(biāo),ti為各階段的過(guò)渡點(diǎn)時(shí)刻,Ti為各階段的持續(xù)運(yùn)行時(shí)間,為了簡(jiǎn)化計(jì)算公式的復(fù)雜程度,用τi=t-ti-1(i=1,2,…,7)表示各階段的起始點(diǎn)作為時(shí)間零點(diǎn)的時(shí)間,即局部時(shí)間坐標(biāo)。同時(shí)假設(shè)加加速度和減減速度都為J,且最大加速度為Am,即T1=T3=T5=T7=T,初始速度為Vs,最大速度為Vm,則通過(guò)對(duì)每段過(guò)程的分析,可得對(duì)應(yīng)軌跡段的加速度函數(shù),分別為:
通過(guò)對(duì)每個(gè)階段加速度函數(shù)進(jìn)行積分運(yùn)算,即可得出速度函數(shù),為:
對(duì)公式(14)中各階段的速度以公式(15)進(jìn)行積分,即可得到運(yùn)動(dòng)的位移函數(shù):
2.3? ? 基于S型加減速曲線的圓弧插補(bǔ)
通過(guò)上述對(duì)圓弧和S型曲線的分析,給定機(jī)器人圓弧軌跡的初始位置P1、中間點(diǎn)P2、終點(diǎn)P3,由公式(6)(11)可得出機(jī)器人在新坐標(biāo)系下的圓弧半徑r和圓心角θ2,則機(jī)器人運(yùn)動(dòng)的圓弧軌跡位移L=rθ2[4]。
設(shè)S曲線的初始速度和終止速度為Vs,最大速度為Vm,最大加速度為Am,加加速度和減減速度為J,可得各階段的運(yùn)行時(shí)間:
根據(jù)機(jī)器人空間圓弧插補(bǔ)的原理,設(shè)計(jì)其插補(bǔ)控制程序,流程圖如圖5所示。
3? ? 圓弧軌跡規(guī)劃仿真實(shí)驗(yàn)
以KNT-ESR6B教學(xué)機(jī)器人為實(shí)驗(yàn)平臺(tái),在其工作空間中選定不共線的三點(diǎn),即起始點(diǎn)P1、中間點(diǎn)P2、終點(diǎn)P3,其位姿數(shù)據(jù)如公式(17)所示(假設(shè)運(yùn)動(dòng)過(guò)程中姿態(tài)保持不變):
在Matlab平臺(tái)基于S型加減速曲線對(duì)空間圓弧插補(bǔ)算法進(jìn)行仿真,其圓弧插補(bǔ)過(guò)程中各軸坐標(biāo)變化曲線以及圓弧插補(bǔ)的運(yùn)動(dòng)軌跡如圖6所示。
通過(guò)以上仿真圖形數(shù)據(jù)可以看出該機(jī)器人進(jìn)行插補(bǔ)時(shí)的運(yùn)行軌跡,驗(yàn)證了基于S型曲線加減速的機(jī)器人空間圓弧插補(bǔ)算法的可靠性。
4? ? 結(jié)語(yǔ)
本文基于S型加減速曲線對(duì)機(jī)器人空間圓弧軌跡規(guī)劃進(jìn)行了研究,通過(guò)坐標(biāo)系轉(zhuǎn)換矩陣,將基坐標(biāo)系下的圓弧軌跡轉(zhuǎn)換至圓弧所在平面的新坐標(biāo)系下,完成了插補(bǔ)過(guò)程;同時(shí)針對(duì)軌跡規(guī)劃曲線的平滑性要求,運(yùn)用S型加減速曲線進(jìn)行升降速控制,通過(guò)仿真結(jié)果看出運(yùn)用S型加減速控制使得軌跡規(guī)劃曲線趨于平滑,可以減小電機(jī)加減速時(shí)所造成的機(jī)器人運(yùn)動(dòng)抖動(dòng)。仿真的結(jié)果驗(yàn)證了所提算法的可靠性,為KNT-ESR6B機(jī)器人的控制實(shí)現(xiàn)提供了理論依據(jù),具有一定的實(shí)用價(jià)值。
[參考文獻(xiàn)]
[1] 蔡自興.機(jī)器人學(xué)基礎(chǔ)[M].北京:機(jī)械工業(yè)出版社,2015.
[2] 孫瑛,程文韜,李公法,等.關(guān)節(jié)型機(jī)器人軌跡規(guī)劃算法及軌跡規(guī)劃研究現(xiàn)狀[J].長(zhǎng)江大學(xué)學(xué)報(bào)(自科版),2016(28):32-38.
[3] 張霞,孫強(qiáng),蔡順燕,等.機(jī)器人軌跡規(guī)劃控制策略研究[J].微電機(jī),2019(11):76-81.
[4] 劉蕾,柳賀,曾輝.六自由度機(jī)器人圓弧平滑運(yùn)動(dòng)軌跡規(guī)劃[J].機(jī)械制造,2014(10):4-5.
收稿日期:2020-04-09
作者簡(jiǎn)介:丁猛(1981—),男,江蘇南京人,工程師,研究方向:自動(dòng)控制。
