城市軌道交通信號系統發展展望
2020-09-02 09:10:25鄧紅元
現代城市軌道交通 2020年8期
關鍵詞:展望
鄧紅元

摘 要:伴隨著自主化城市軌道交通信號系統(以下簡稱“城軌信號系統”)技術的蓬勃發展與不斷擴張的市場需求,城軌信號系統的發展到了臨界點。如何在傳承既有技術的基礎上,探索下一代信號系統的發展,是行業中熱議的焦點。文章從閉塞制式和系統架構 2 個角度出發,通過深入總結現狀并結合相關專業前沿技術,探究城軌信號系統下一步的演進方向,提出系統智能化發展建議,以實現城軌信號系統“增效、降本、提智”的目標。
關鍵詞:城市軌道交通;信號系統;閉塞制式;系統架構;CBTC;展望
中圖分類號:U285.5
1 背景
信號系統是保障行車安全、提升運輸效率的關鍵系統。目前,絕大多數城市的軌道交通系統均采用基于通信的列車自動控制系統(CBTC),該系統基于“擋墻”原理,根據前車的瞬間位置防護后續列車的安全,并實現列車自動運行、進路自動選排等自動化功能。
隨著城市軌道交通列車控制系統自主化技術的不斷成熟應用,中國鐵路通信信號股份有限公司等自主化廠家,利用重慶市軌道交通互聯互通CBTC系統示范應用項目,在中國城市軌道交通協會的指導下發布了《城市軌道交通 基于通信的列車運行控制系統(CBTC)互聯互通系統規范》系列團體標準,逐漸統一了信號系統的需求、架構、功能分配及接口,促進城市軌道交通線路的建設從傳統的單線獨立建設、獨立運營,向著網絡化建設、網絡化運營過渡。部分新建線路也在CBTC系統基礎上引入了更多自動化、智能化的功能需求,使城軌信號系統向著全自動運行(FAO)方向發展。
縱觀信號系統的發展脈絡,其均以提高安全性、降低建設和維護成本、增加運輸效率和提升自動化水平為出發點。目前CBTC系統的發展已經較為成熟,下一代信號系統能否在保障安全的基礎上,進一步提升運輸效率、降低建設和維護成本,并利用信息化技術使城軌信號系統更加智能化,實現“增效、降本、提智”的目標,值得深入探討。
2 閉塞制式現狀及演進
閉塞是保證前行列車和追蹤列車之間保持一定距離運行的技術方法,而閉塞制式確定了安全防護機制和行車間隔。信號系統的發展長期以來都離不開閉塞制式這一主題。
2.1 閉塞制式現狀
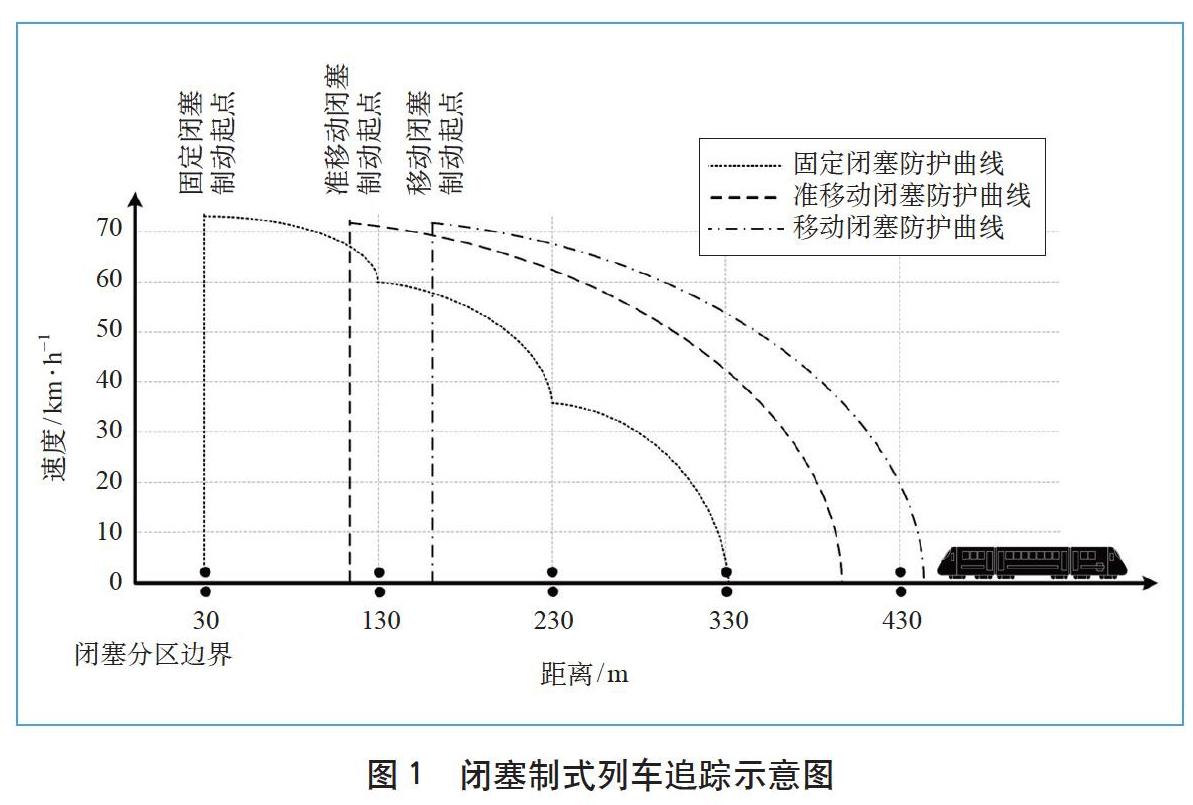
目前,CBTC系統采用的移動閉塞制式突破了固定閉塞分區的限制,通過車-地實時通信,動態地更新列車運行前方的危險點。從固定閉塞到準移動閉塞,再到移動閉塞,列車之間的追蹤間隔逐漸縮小,如圖1所示。
20世紀90年代中期以前,我國城市軌道交通主要采用固定閉塞系統,通常按照出口速度控制方式防護列車運行安全,其制動起點為當前車輛占用的閉塞分區終點,制動終點為前方列車占用閉塞分區后方的第一個區段入口,形成階梯式分級速度控制曲線。
20世紀90年代中后期,準移動閉塞在國內的應用逐漸興起。準移動閉塞制式較固定閉塞制式,列車增加了定位功能,車-地之間傳輸的信息更加豐富,因此,其制動起點根據當前列車的實際位置動態確定,制動終點為前方車輛占用閉塞分區后方的區段入口,并留有一定的余量,形成目標-距離速度控制曲線,最小行車間隔有了顯著提升。
進入21世紀后,移動閉塞系統得到了大規模的應用,相較準移動閉塞,車-地間通信更加豐富,列車定位更加準確,其制動終點為前方車輛的尾部,并留有一定的余量,進一步縮短了最小行車間隔。
2.2 閉塞制式演進
移動閉塞是城市軌道交通當前最為成熟的閉塞制式,在移動閉塞制式的基礎上,若能夠進一步突破速度防護曲線對列車追蹤間隔的限制,使正常運行的前后車之間的距離進一步縮短,將對提高線路運輸效率、增強運輸組織靈活性有著巨大的促進作用。通過借鑒以下相關行業的發展,本文將提供一種閉塞制式演進的可能。
在航空航天領域,天舟1號和天宮2號在太空實現高速下的對接,天宮2號的飛行軌道高度為350~400km,最低運行速度為28000km/h,對接直徑約為2m。在對接過程中,天舟1號在距離為5000m、400m、120m和30m共4 個停泊點處減速調整。進入30 m間距后,天舟1 號和天宮2號之間的對接由系統自主判斷,實現自動對接。
在車聯網領域,沃爾沃公司研發的基于車-車協同的汽車車隊運行模式,通過車端到車端(V2V)通信技術實現車和車之間的車隊協同運輸,即車輛根據運行需求可以動態地加入車隊或者離開車隊,配合自動駕駛功能實現智能化的高效運行組織。
目前,北京市軌道交通 12 號線擬采用物理接口實現列車之間的在線動態物理連掛、解編,可將2列4輛編組列車首尾連掛形成8輛編組列車,實現4 輛、8 輛編組列車同時在線混運。但物理編組需要列車在低于5 km/h的速度下對接,且存在反復連掛、解編機械連接致使部件磨損等問題。
以上3個案例為城市軌道交通閉塞制式的演進提供了啟發:以傳統基于位置的追蹤模式為基礎,實現基于速度的追蹤模式和基于耦合的追蹤模式,如圖2所示。
圖2中,CBTC-BL(Based Location)曲線為基于位置的后車追蹤曲線,CBTC-BV(Based Velocity)曲線為基于速度的后車追蹤曲線,CBTC-BC(Based Coupling)曲線為基于與前車耦合的后車追蹤曲線。
CBTC-BV是在CBTC-BL模式的基礎上,引入前車速度參數,實現前車與后車基于實時速度的追蹤,以達到追蹤的極限。CBTC-BC則是引入了車-車協同的理念,將前車與后車進行虛擬編組耦合形成車隊,共同調度和運行,進一步達到縮短運行間隔、提高線路整體運輸能力的目的,可在早晚高峰時便捷地實現列車組隊以提升運能,在平峰時快速分離。在不降低運營密度的情況下,以短編組列車運行,打破運能與行車密度之間的關聯關系,達到“增效”的目的,使乘客在出行方面獲得更多的滿足感。
在CBTC-BC模式下,具有相同運行方向的2列列車可以動態耦合,在遇到分岔點時,可逐步加大間距,按照不同的運行目的自主解耦獨立運行。基于耦合的追蹤模式打破了移動閉塞制式目前的追蹤瓶頸,在傳承的基礎上實現了閉塞制式的進一步演進。由于系統保留了CBTC-BL曲線,因此在出現車與車之間通信異常、無法投入CBTC-BC時,仍可按照傳統模式實現CBTC模式下的連續追蹤。
3 系統架構現狀及演進
3.1 系統架構現狀
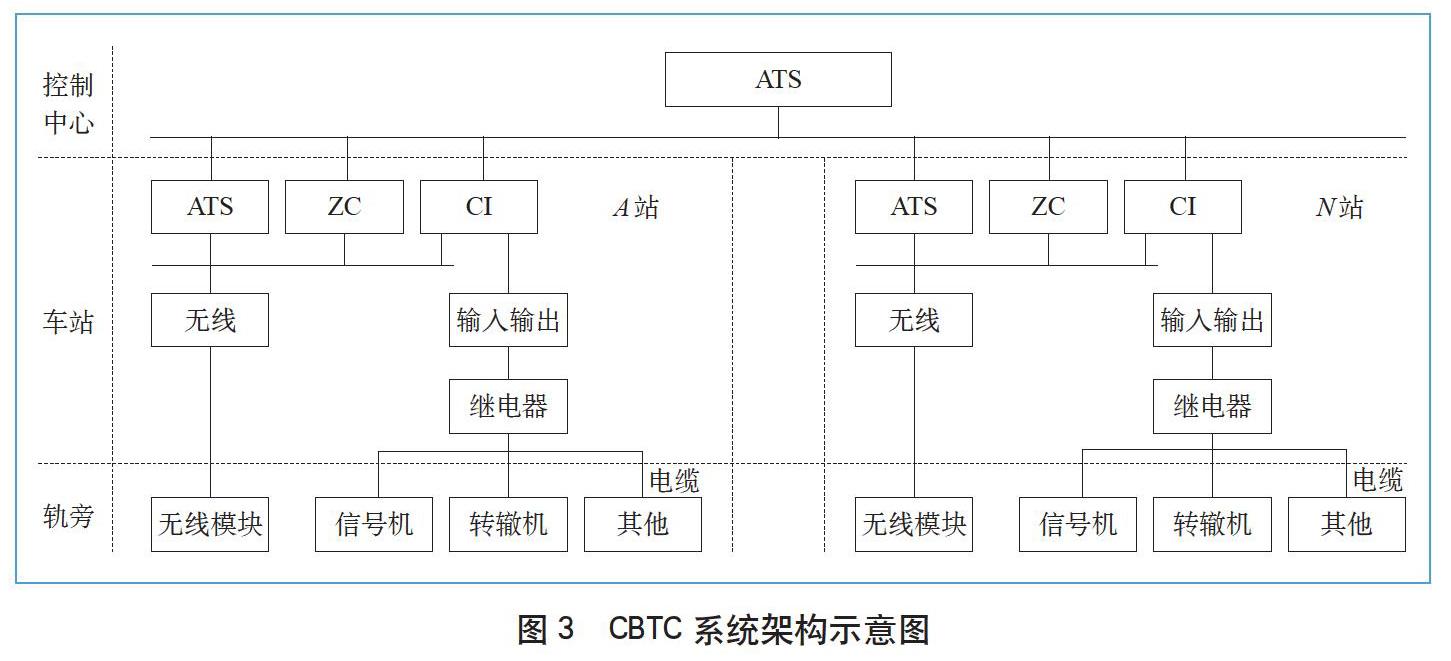
目前國內線路的系統架構主要包括控制中心、車站、軌旁和車載4個部分,本文圍繞控制中心、車站、軌旁3 個架構進行優化研究,如圖3所示。目前3個系統架構在一定程度上繼承了國家鐵路的發展,以計算機聯鎖(CI)為基礎,逐步疊加了列車自動監控(ATS)與區域控制器(ZC)等設備,其中ATS承擔行車指揮功能,ZC承擔移動授權計算及列車管理功能。設備采用分布式部署方式,相互之間影響較小,設備維護相對分散。雖然這種系統架構的靈活度較高,但整合度低,不同子系統之間信息頻繁交互,通信延時也大大增加。
同時,CI通過驅動采集繼電器實現對軌旁設備的控制。在車站設備中,裝設繼電器的組合柜占用了大量的設備房面積,不利于后期信號系統的升級、改造;在工程建設階段,繼電電路的實現需要現場施工單位反復校核,確保配線正確,從而會延長建設工期;在運營維護中,繼電電路發生故障后,排查及處置周期較長,給行車安全帶來隱患。
此外,隨著城市軌道交通自動化、智能化程度的不斷提升,信號系統的架構不利于專業之間的信息共享,造成了信號專業的信息孤島,因此系統架構可進一步進行整合與優化。
3.2 系統架構演進
3.2.1 軌旁設備控制數字化
目前信號系統采用集中控制的方式,室外設備通過線纜與室內連接,室內設備通常采用繼電電路實現對室外設備的監控,由于線纜的物理局限性,使其在控制范圍上受到限制,因此聯鎖設備必須在車站內按照區域進行設置。軌旁設備控制的數字化是通過電子執行單元替代傳統的繼電執行電路,實現聯鎖控制部分與執行部分在設置上的同址耦合關系,從而實現靈活部署:
(1)聯鎖控制部分既可分散設置,也可在控制中心或指定站集中化設置;
(2)聯鎖執行部分可根據需要分散設置于某幾個車站,也可在室外區域集中設置。
以光纖網絡代替傳統的金屬信號電纜,將基礎設備通過電子執行單元在軌旁直接接入通用網絡,從而對單個設備或一定區域內的多個設備進行控制,實現軌旁設備控制的數字化。
目前在國內項目中,采用電子執行單元替代傳統繼電執行電路的聯鎖系統主要由西門子、龐巴迪等外商提供核心技術。以中國通號為代表的自主化供貨商已完成了相關研究,其成果已在路外應用,并正在積極向城軌領域推廣,這將對大幅度降低建設成本、減少維護投入、緩解既有線改造難度產生深遠的影響,也將為系統結構的演進提供技術支撐。
3.2.2 軌旁一體化控制系統
軌旁一體化控制系統是融合ZC與CI設備功能的安全控制系統。ZC與CI一體化設計,可優化2個設備之間的接口性能,減少系統的反應時間,具有更高的可用性及豐富靈活的運營支持功能,更有利于實現高效的列車控制,如圖4所示。相比未進行一體化的系統,實時性將提高50%,設備整合也將進一步減少設備用房的空間需求。
軌旁一體化控制系統的研究已取得一定成果。2019 年5月21日,中國鐵路總公司科信部會同工電部在北京組織召開了“列控聯鎖一體化系統”技術方案評審會,與會專家認為列控聯鎖一體化系統集成了列控中心和計算機聯鎖的全部功能,實現了軌旁設備的全電子控制,減少了設備數量和接口,符合技術發展趨勢和電務專業的應用與維護需求。
由于軌旁一體化控制系統對硬件進行了整合,硬件成本進一步降低,維護設備的數量也進一步減少,系統處理的實時性得到進一步加強。在進一步降低成本的同時,由于系統內時延減少,進一步提升了系統在速度250km/h線路上的適應性。
3.2.3 系統結構靈活化
通過上述的系統優化,實現了全以太網化的控制模式。在硬件和計算能力滿足的前提下,可以將車站設備進一步整合,即將軌旁一體化控制設備整合到一個車站或者集中設置在控制中心,同時將ATS系統車站設備與控制中心設備整合,從而在滿足常規部署的同時可滿足集中化部署的需求,如圖5所示。
通過設備的整合,簡化系統架構、充分分配功能、減少中間環節和設備間同步的復雜度是未來技術發展的主要特征,基于車-車通信的CBTC是該發展思路的一個分支。
3.2.4 系統功能智能化
城軌信號系統發展到今天,其自動化程度不斷提升,但智能化程度尚待進一步探索和提升。目前城市軌道交通各線各專業的硬件資源均單獨設置,形成了信息孤島,不便于數據的整合與挖掘,那么未來各專業在面向單一業務的基礎上,應逐步朝著集中化(面向標準化組件)、虛擬化(面向資源)、云計算(支撐決策和提供增值服務)方向發展。隨著云計算和大數據等技術的不斷發展,城市軌道交通業務也將朝著平臺通用化、中心虛擬化、車站一體化方向延展。系統功能的智能化建立在信息化發展的基礎上,充分挖掘“信息”價值,為調度、維護、乘客提供“智慧”服務。例如,信號系統會根據以往客流數據并動態感知,智能地調整列車運行密度:若線路上某一設備發生故障,在調度員不介入的情況下,信號系統根據運營和故障情況,結合應急策略生成對應的解決方案,智能地引導故障的排除及運營秩序的恢復,并根據平臺、網絡和基礎設備的數據,在列車發生緊急制動后迅速判斷出故障原因,無須事后逐項分析等;若在線路某區域發生了重大故障,系統可以高效地提供跨線路甚至跨路網的交通疏解方案。
4 結語
在《交通強國建設綱要》的指引下,城市軌道交通作為交通系統融合發展的關鍵環節,需要充分發揮自主化技術優勢,以既有技術積累為基礎,解放思想;在確保安全的基礎上,將相關領域內的先進技術、理念、方案與城軌信號系統相互融合。從其歷史發展規律及國外行業發展現狀可知,閉塞制式和系統架構的演進是必然趨勢,智慧城軌也在逐步落地生根,這就需要業主、廠商共同協作,在傳承的基礎上不斷創新,以便實現城軌信號系統“增效、降本、提智”的目標。
猜你喜歡
商(2016年32期)2016-11-24 17:21:50
科學與財富(2016年15期)2016-11-24 13:33:33
電腦知識與技術(2016年24期)2016-11-14 00:25:15
北方文學·下旬(2016年7期)2016-11-10 10:41:57
藝術與設計·理論(2016年10期)2016-11-04 16:28:54
商業會計(2016年15期)2016-10-21 07:37:55
中國科技博覽(2016年18期)2016-10-19 08:22:11
現代園藝(2016年17期)2016-10-17 06:54:29
科學與財富(2016年28期)2016-10-14 21:45:00
考試周刊(2016年77期)2016-10-09 12:37:53
