《伺服電機端蓋之工步劃分》信息化教學設計探討
2020-09-10 18:23:52張桂花
內燃機與配件 2020年3期



摘要:為主動適應智能制造產業轉型升級對智能制造人才培養的需要,文章在分析學生的學習需求后確定了課程的三維教學目標和重難點,以伺服電機前端蓋為任務載體驅動教學,對接企業工藝設計流程,分為提工步-辯工步-驗工步三步組織教學,采用步步為贏分組PK,通過動畫、頭腦風暴、vericut仿真加工軟件、彈幕找茬、直播系統等信息化資源和手段對課程進行信息教學設計以突出教學重點和破解教學難點。信息化教學實踐表明,信息化手段的呈現降低了學習難度,有效達成教學目標,提升學生工藝設計能力,滲透智能制造的核心理念,培養高素質人才。
關鍵詞:伺服電機端蓋;工步劃分;信息化教學設計
0 ?引言
工藝為產品之父,產品能否保持一致和完整的關鍵取決于工藝是否敏捷、綠色、創新、精益和高效。隨著中國制造2025號角吹響,智能化悄然走進各行各業,大批機器人取代人工操作,這種產業升級對數控工藝提出新的更高的要求,迫切需要面向智能制造的即能馭智能又精工藝的人才。如何培養適應智能化生產需要的數控工藝人員,需要我們對傳統的《數控加工工藝》課程進行革故鼎新的改革。
眾所周知,《數控加工工藝》課程是從生產實踐中總結和發展起來的科學,主要探索解決工藝過程中遇到的實際問題。而實際生產中由于不同工廠的設備生產能力、精度以及工人熟練程度等因素都大不相同,所以對于同一種產品而言,不同的工廠制定的工藝可能是不同的;甚至同一個工廠在不同的時期做的工藝也可能不同。可見,就某一產品而言,工藝并不是唯一的,而且沒有好壞之分。這種不確定性和不唯一性,決定了該課程的特點就是實踐性很強,因而對于沒有加工經驗的高職學生來說,其痛點為感覺是抽象的,難以理解的;而對于有加工經驗的中高職銜接學生來說,其難點卻是知其然而不知其所以然,只懂得產品如何加工,不懂得為什么要這樣加工[1]。這種困擾給《數控加工工藝》課程帶來的困境是“教師難教,學生難學”,教學效果欠佳。且已有的《數控加工工藝》課程信息化教學設計尚停留在嵌入加工視頻和動畫的多媒體課件理論教學,而教學仍為教師的單向輸出[2]。基于上述原因,對課程教學全過程進行信息化教學改革顯得尤為急迫,既是回應產業升級對高素質人才培養需求的需要,更是破解課程教學困境的良方,本文挑選工步劃分知識點進行案例研究,以期提供信息化教學設計的普適性實現途徑。
1 ?教學分析
一個優秀的信息化教學設計是根據教學對象和教學目標,確定合適的起點和終點。本例中通過問卷星調研分析了學習者學習需求、學習內容和學習者的特點及起點水平,并借助問卷星的統計&分析功能,真正了解學生的學習需求、心理認知特點和已有知識經驗,他們對智能制造興趣濃厚,愿意從事技術工種;善于動手實操,喜歡移動互聯,樂于學習專業新技術,且已掌握機械制造工藝的基礎理論和智能產線的操作能力;但工藝設計能力不足,畏難情緒普遍存在,智能制造核心理念(敏捷、綠色、創新、精益和高效)模糊。
基于以上調研分析,根據《制造業人才發展規劃指南》[3]和校企合作開發的課程標準,確定本次課的教學目標如圖1,界定教學內容的重點為工步劃分方法、難點為如何合理劃分工步、關鍵點為工步的定義及劃分原則。聚焦工藝設計能力培養,浸潤和滲透智能制造核心理念,旨在培養面向未來的智能制造工藝人員。
2 ?教學策略
教學策略是在教學目標確定以后,根據已定的教學任務和學生特征,有針對性地選擇與組合相關的教學內容、教學組織形式、教學方法和技術,使教學效果趨于最佳的教學方案。
本例中基于上述教學目標,在教學策略上因建構主義學習理論認為,知識不是由教師傳播的,而是學生自己在一定的社會環境下,基于已有知識,借助他人的幫助,主動形成新知識的認知過程,且強調學習者的學習活動必須與任務或問題相結合,以探索問題來引導和維持學習者的學習興趣和動機,創建真實的教學環境,讓學生帶著真實的任務主動學習,并通過完成任務不斷地獲得成就感,激發求知欲望,逐步形成一個感知心智活動的良性循環[4]。所以遵循建構主義學習理論采用任務驅動法組織教學。創設真實職業情境,教學場地選擇真實智能制造生產線,挑選華大電機公司伺服電機前端蓋生產任務為載體,制定此零件的智能制造工藝之劃分工序1車床加工的工步。教學過程對接企業工藝設計流程,并嵌入步步為贏的激勵策略,創設為三步:提工步(明概念)-辯工步(思方法)-驗工步(馭智造),每步均設置有疑惑,從“什么是工步?”到“工步如何劃分?”再到“最佳工步能否實現?”,開啟步步為贏分組PK之旅,實施沉浸式和參與式學習方法,在解惑中引導學生主動探究,合作學習、發現并解決問題,步步推進教學內容的學習,培養學生工藝設計能力,滲透智能制造的核心理念。
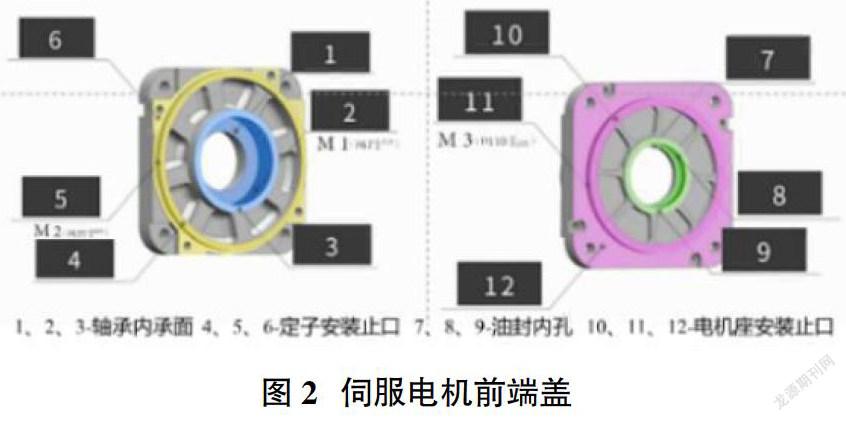
根據預設的教學重點,借助三維實體模型(如圖2)形象直觀的展示復雜難懂的工步加工內容,化難為易;引入三維動畫直觀展示工步加工過程,解決傳統教學中難以用語言描述清楚的問題,化虛為實;實施頭腦風暴討論不同工步劃分方法的加工精度和效率因素,聚焦教學內容,突出學習重點。
而加工工藝設計具有實踐性強、知識涉及面廣(工件、機床、刀具和夾具等)的特點,所以相同的工序也許因為刀具或夾具的差別而選擇劃分工步的方法不同,進而導致其工步內容不同。為破解如何合理劃分工步的難點,本例利用vericut軟件虛擬仿真工步劃分,將抽象的理論知識顯性化,直觀展示加工路徑及產品質量,化虛為實,并借助彈幕找茬引導學生根據敏捷、綠色、創新、精益、高效五大理念,確定工步劃分要按照四種方法綜合考慮,辯解得到最優方案,并讓大家通過云數控和視頻直播,在智能制造生產線上驗證了工步,真實感受智能制造生產流程,突破教學難點。
除此之外,針對工藝設計能力不足,畏難情緒普遍存在,采用4F引導法[5]和小組討論滾雪球法,讓小組4個人先單獨寫(Fact事實、Feeling感受、Find發現、Future行動),再兩兩討論相似的觀點,4個人統一相似觀點,最后由1人團隊匯報,幫助學生克服畏難情緒,敢于開口說話,學會正確劃分工序1車床加工的工步。鑒于智能制造核心理念(敏捷、綠色、創新、精益和高效)模糊,在理實一體化的教學環境下將學生按照智能制造核心理念分為敏捷、綠色、創新、精益和高效組,采用小組協作的方法開展各種教學活動,全程浸潤和滲透智能制造核心理念。
3 ?教學過程
基于以學生為主體,教師為主導的教育理念,利用信息化資源和手段將課堂延展為課前自學、課中導學、課后提升三個階段,激發學生學習興趣,提高課堂實效。
3.1 課前自學
課前教師在云班發布教學活動安排和加工零件圖。學生登陸云班,以小組為單位自學手機云教材課件、微課、動畫,進行試題闖關,擬定工步劃分方案,拍照上傳云班。富有挑戰的任務和豐富的學習資源點燃學生學習熱情,培養學生自主學習能力。而課前測及時診斷和反饋學生自學效果,便于老師了解學情,按照學生認知規律調整教學難點和教學策略。
3.2 課中導學
課中按任務驅動法劃分為任務導入-任務分析-任務實施-任務總結四大環節。
3.2.1 任務導入(5min)
任務導入的心理任務在于激發興趣和情感,產生學習動機,把學生引進新課的學習情境中去。本例中以敏捷組分享伺服電機前端蓋智能制造生產流程視頻引出本次課的任務:工序1的工步劃分。該視頻直觀展示了伺服電機前端蓋的智能制造過程:分為兩道工序,工序1是數控車床的加工,工序2是加工中心的加工。先是機器人夾持軸承內孔,將端蓋從傳送帶送到數控車床上,車削加工完成后,機器人將端蓋送入加工中心,加工完成后,機器人取下工件送入傳送帶,自動清洗和檢測。高大上的機器人和自動檢測元素一下子就抓住了學生的眼球,讓學生沉浸在智能制造的美好未來中,產生積極的學習期待。
3.2.2 任務分析(10min)
教師分析課前學生試題闖關和工序卡的填寫情況,發現學生對工步及復合工步的定義有一定的理解,但通過率只有13.3%。為進一步明晰加工任務,活躍課堂氛圍,開啟云課堂搖一搖,引導學生分析加工任務,并通過工藝分析動畫,直觀展示零件結構,引導學生正確分析工序1的加工部位及精度要求為4個加工部位(軸承內孔面、定子安裝止口、油封內孔、電機座安裝止口)、共計12個加工面,分左右2端,滿足3個加工精度。三維動畫展示,化虛為實,降低學習難度。
3.2.3 任務實施
這12個加工面的工步劃分是從敏捷組和高效組的PK拉開帷幕的。敏捷組認為有12個工步,把每一個面加工作為一個工步;而高效組不同意敏捷組的方法,認為一個工步需要換一次刀,需要換12次刀,這樣加工效率低下,如按一把刀具作為一個工步,可分為5個工步。這種組間PK引發的認知沖突,激發學生學習工步和復合工步定義的強烈愿望,促進對概念的理解。
任務實施按企業工藝設計流程又分為提工步(明概念)-辯工步(思方法)-驗工步(馭智造)三步。
3.2.3.1 提工步明概念(15min)
工步和復合工步的定義學習是在緊張、刺激、活躍的搶答中進行的。為把握關鍵點,降低學習難度,教師調用動畫直觀展示工步和復合工步的定義及區別,點評敏捷組和高效組各自的工步劃分方法,肯定前者按加工部位劃分,后者按所用刀具劃分。圖表的直觀對比可知效率由12個提升至5個工步,強烈對比、試錯糾錯讓學生深刻理解智能制造的效率理念。
3.2.3.2 辯工步思方法(60min)
有沒有更高效的方法呢?教師發起頭腦風暴,小組辯論,即培養學生發散思維,同中求異,正向求反,多向輻射;又培養辯證思維,看到不利條件下的有利因素,錯誤結論中也可能包含某種合理成分[6]。這種思維碰撞帶來新思路和新方向,綠色組按裝夾次數來劃分2個工步(即左端和右端),而創新組質疑掉頭裝夾問題,認為采用專用刀具可優化高效組方案,即去掉掉頭裝夾工步。
教師調用動畫直觀展示4個工步劃分方案的加工過程,點評各自優劣;并通過VERICUT軟件虛擬仿真,直觀展示工步的刀具路徑、刀夾具的干涉情況及加工完成后質量情況,將抽象的理論形象化,化虛為實,降低學習難度,突出教學重點;隨后開啟加工精度找茬游戲,個性化的彈幕分享讓課堂變得更加生動有趣,精益組認為軸承內孔的加工精度難以保證,還需在創新組方案后加一個精加工(如表1),以粗精加工劃分工步。
通過設疑激趣,引發學生一步一步探求解決方案的渴望,提高學習興趣;通過質疑、試錯、找茬,深刻體會工步劃分應綜合考慮智能制造的綠色制造、創新、精益求精、高效的理念,辯解得到最佳工步(如表1),破解教學難點。
3.2.3.3 驗工步馭智造(60min)
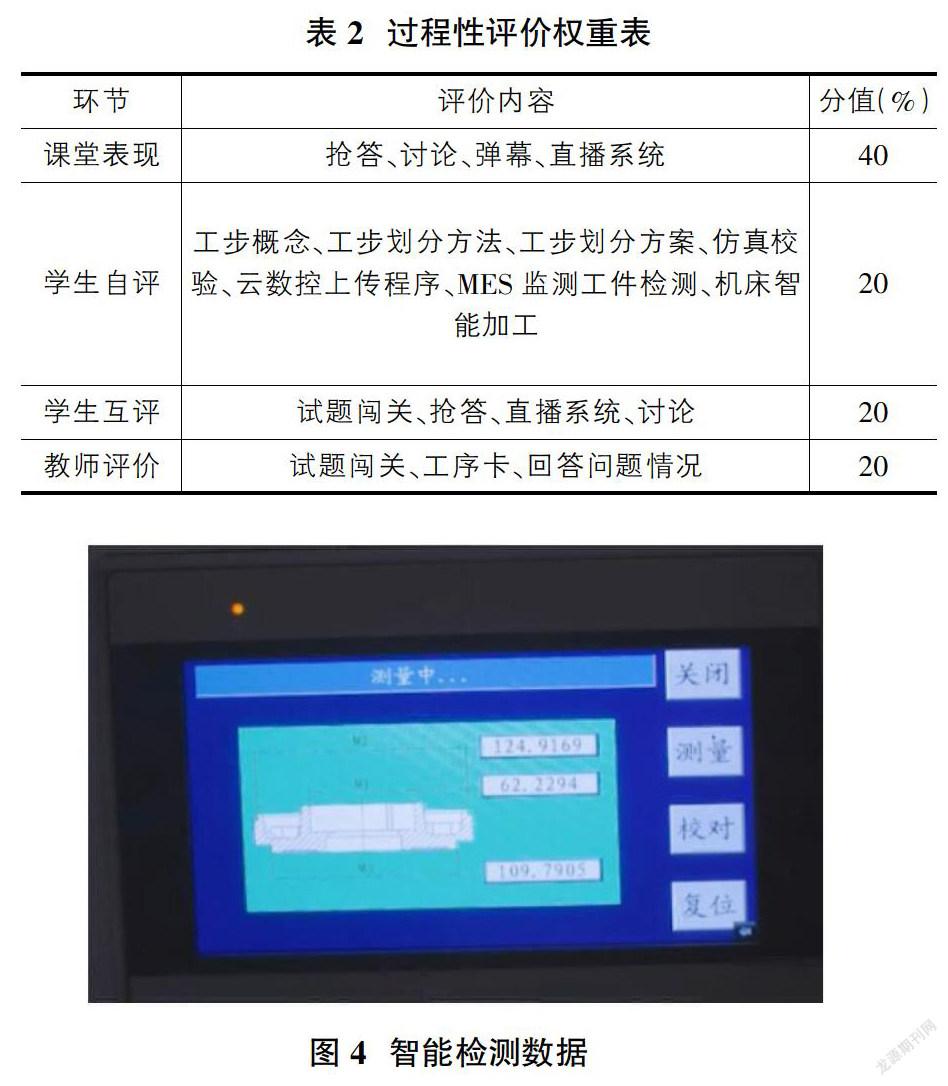
最佳工步的工件精度能否滿足要求,需要到真實的智能制造生產線上加工工件予以驗證。為解決實訓場地設備的限制和現場教學易失秩序問題,教師開啟直播系統(如圖3),讓學生使用云數控派發訂單,將工步程序發送到車床;并進入智能產線操作機床單步加工;加工完成后,監控機器人取下零件送入智能產線,轉入檢測裝置;監測智能檢測數據(如圖4)和MES系統數據,3個檢測尺寸均在誤差范圍內,MES系統中顯示“零件合格”。跟隨智能制造工藝設計流程,讓學生強烈體驗通過直播系統、云數控、MES系統實現智能化、信息化和自動化的智能制造的“駕馭”之樂!
3.2.4 任務總結(15min)
為驗證教學效果,提升學生學習成就感,學生進行試題再次闖關和最佳工步劃分作業,云課堂測試結果顯示試題闖關通過率達到100%,遠遠高于課前的13.3%,工藝卡的合理性也是100%。
為梳理和鞏固知識點,把握重難點,理清知識脈絡,引導學生運用思維導圖整理工步劃分的方法和要點,拍照上傳云班。
教師利用信息化平臺工具搜集數據對學生的學習效果進行評價,表彰先進,激勵后進,激發學生參與課堂的積極性,注重課堂效率,提高教學質量。整合課前課中課后評分,綜合課堂表現、教師評價、學生自評、互評(如表2),表現優異的被評為“智能之星”,進步最大的被評為“進步之星”。
3.3 課后提升
為鞏固所學知識點和提升操作技能,要求學生課后對端蓋的工序2(電機軸安裝孔、定子安裝孔)進行工步劃分,將作業上傳云班。
4 ?教學效果
①信息化手段降低了學習難度,課中通過學習后進行試題闖關通過率達到100%,遠遠高于課前的13.3%,工藝卡的合理性也是由課前的30%上升為100%,有效達成教學目標。
②通過提工步-辯工步-驗工步,步步為贏,深刻體會智能制造的敏捷、綠色、創新、精益和高效的理念。
緊跟產業升級,依托柔性化智能制造產線,采用任務驅動法,以伺服電機前端蓋為載體,遵循企業工藝設計流程,將教學過程創設為三步:提工步(明概念)-辯工步(思方法)-驗工步(馭智造),開啟步步為贏分組PK,每步均設置有疑惑,通過動畫、小組討論、彈幕找茬、vericut仿真加工、直播系統和思維導圖等信息化資源和手段對課程進行信息化教學設計,使枯燥抽象的知識和技能生動直觀呈現,在解惑中步步推進教學內容的學習,培養學生工藝設計能力,滲透智能制造的核心理念,培養高素質人才,開創具有可推廣性的智能制造高端人才培養模式。
參考文獻:
[1]連奎.對機械制造工藝學教學方法的探索[J].職業教育研究,2006(4):74.
[2]張桂花,等.《伺服電機軸的數控編程與智能化加工》信息化教學設計探討[J].武漢交通職業學院學報,2018(3):81-86.
[3]制造業人才發展規劃指南[EB/OL].[2017-02-24].http://www.miit.gov.cn/n1146290/n4388791/c5500114/content.html.
[4]徐明成.建構主義理論指導下的“任務驅動式”教學[J].鄭州航空工業管理學院學報,2004(10):75-76.
[5]黃玉.4F討論法[DB/OL].http://reviewing.co.uk/learning-cycle/index.htm.
[6]何克抗.現代教育技術與創新人才培養(下)[J].電化教育研究,2000(7):17-21.