汽車電動助力轉向系統研究
2020-09-10 14:55:31李勝超
內燃機與配件 2020年10期
關鍵詞:控制策略
李勝超

摘要:為了更全面的對電動助力轉向系統(EPS)相關概念、結構特性及整體發展進行認知,本文通過對大量科研論文進行研究,從電動助力轉向系統(EPS)類型特點、基本構成、控制原理、助力特性等角度出發,對電動助力轉向系統(EPS)進行較為全面的詮釋,并對電動助力轉向系統控制策略和穩定性進行了分析,進一步證明了該系統的可靠性。闡明了電動助力轉向系統是未來汽車轉向系統的發展方向。希望本研究對我國汽車轉向系統領域研究具有一定的促進作用。
Abstract: In order to have a more comprehensive understanding of the related concepts, structural characteristics and overall development of electric power steering system (EPS), this paper studies a large number of scientific research papers, and makes a more comprehensive interpretation of EPS from the perspective of the type characteristics, basic structure, control principle and power characteristics of EPS, as well as the electric power steering system (EPS). The control strategy and stability of the power steering system are analyzed, and the reliability of the system is further proved. It clarifies that electric power steering system is the future development direction of automobile steering system. It is hoped that this study will promote the research of automobile steering system in China.
關鍵詞:電動助力轉向系統;控制策略;穩定性;助力特性
Key words: electric power steering system;control strategy;stability;assist characteristics
0 ?引言
近年來,汽車行業的發展不僅是機械材料的發展,還是芯片、嵌入式、電子控制、傳感器等多方面技術有效集成的發展。為了滿足行駛安全可靠、高效環保的要求,電動助力轉向系統(EPS)便在這一趨勢下孕育而生,并逐漸發展成為世界汽車技術方面一項重要的研究。
1 ?汽車電動助力轉向(EPS)系統
1.1 發展歷程
汽車在低速轉向時,往往需要相當大的轉向力,僅憑借傳統的純機械式轉向機構轉向,既費力又效率低下。考慮到這一問題,后來轉向系統中研發出轉向助力機構以幫助駕駛員輕松的轉動方向盤進行轉向。
汽車助力轉向由開始的液壓式助力轉向,到后來的電控液壓助力轉向,再到最終的電動助力轉向系統,這是一個漫長的發展過程。電動助力轉向(EPS)系統采用電子控制單元(ECU)和高性能電動機,直接依靠電動機在不同的工況環境下提供不同的輔助轉矩[1]。EPS最先在日本投入使用,1988年2月,日本鈴木公司的Cervo轎車裝備了EPS系統,之后EPS 系統在鈴木公司Alto轎車、三菱公司Minica汽車上也得到應用。其他國家、公司也加快了對EPS系統的研發[1]。從1998年開始,TRW公司將EPS 技術成功的應用到了客車領域,其他公司相應開發出適應貨車的EPS系統,其關鍵技術在一步步走向成熟[2]。
1.2 汽車電動助力轉向(EPS)系統國內外研究現狀
1.2.1 國外研究現狀
國外在汽車電動助力轉向系統方面的研究相對較早,并取得了一定的重要研究成果:Chen J.S.建立了汽車電動助力轉向系統二自由度模型,采用了多種控制策略,研究該系統的動態特性[3]。AlaaMarouf等人對EPS系統的控制策略進行了研究,將電動機轉角作為監測指標,結合滑模控制的方式對系統進行控制,使得控制策略與參數誤差之間具有一定的魯棒性[4]。還有在EPS系統中應用H∞控制、滑模變方法的相關研究。
1.2.2 國內研究現狀
國內對于EPS系統的研究水平還相對較低,但在國家的大力支持和研究人員的不懈努力下,也取得了一定的研究成果。林逸等人根據EPS系統的助力特性和轉矩傳感器等,率先提出了在助力轉向中的匹配和設計問題[5]。清華大學汽車安全與節能國家重點實驗室研究出了電動助力轉向系統的新型微處理器[6]。國內的許多汽車企業和研究院在大力進行EPS系統及相關控制策略的研究,并投入實車測試與使用。
2 ?EPS系統基本組成與控制原理
2.1 EPS系統的類型與特點
通常情況下,EPS系統根據助力電機位置不同被劃分為管柱式、齒輪式、齒條式三種[7]。其各自的特點及應用如表1所示。
2.2 EPS的基本組成
電動助力轉向系統(EPS)由傳統的機械結構和電子元件構成。汽車電動助力轉向系統的構成所需要的關鍵部件為:轉矩傳感器、車速傳感器、助力電機、減速機構、電子控制單元(ECU)[8]。
轉矩傳感器:用來測量加在轉向盤上的轉矩大小和方向的。其可靠性、精確性及價格是占據市場的決定性因素。
速度傳感器:實時監測車速信號。
助力電機:助力電機的主要作用就是根據ECU的指令施加輔助動力,一般運用BLDC(無刷直流)電機用于輔助和負載電機,值得注意的是,從建模的角度來看,BLDC電機具有與直流電機相同的特性,盡管它們具有不同的結構。
減速機構:一側直接與助力電機相連,另一側與轉向架相連,起降速增扭的作用。
電子控制單元(ECU):實時獲取扭矩傳感器和車速傳感器信號,根據事先在ECU中設定的EPS助力特性曲線、控制策略來判斷提供助力。
2.3 EPS系統的控制原理
ECU獲取轉矩傳感器上的轉向盤轉矩信號與速度傳感器的車速信號,根據這兩個信號,控制器確定助力電機轉動方向與助力轉矩的大小,控制器的輸出數字信號經過D/A轉換器轉換成為模擬量,傳至電流控制電路。電流控制電路將此電流值大小與助力電機電流大小相比較得到差值,將差值信號傳至電機驅動電路,對電機實施控制,從而完成助力轉向過程[9]。助力過程根據速度不同而不斷調整,實時性非常高,所以其輸出力矩能夠適合各種工況下的行駛條件。
3 ?EPS的助力特性與控制策略的研究
3.1 助力特性
助力特性是指電動助力跟隨汽車車速和轉向盤轉動變化而變化的規律。對于ESP系統,提供的助力與電動機輸入的控制電流成比例關系,用控制電流與方向盤力矩、汽車車速變化關系曲線來表示EPS系統的助力特性[10-11]。但選用不一樣的助力特性對于轉向輕便性和路感有不一樣的影響。EPS助力特性曲線反映了方向盤力矩與電機助力力矩之間關系的曲線,其中包括直線型、折線形、曲線型三種形式[12]。
3.2 控制策略
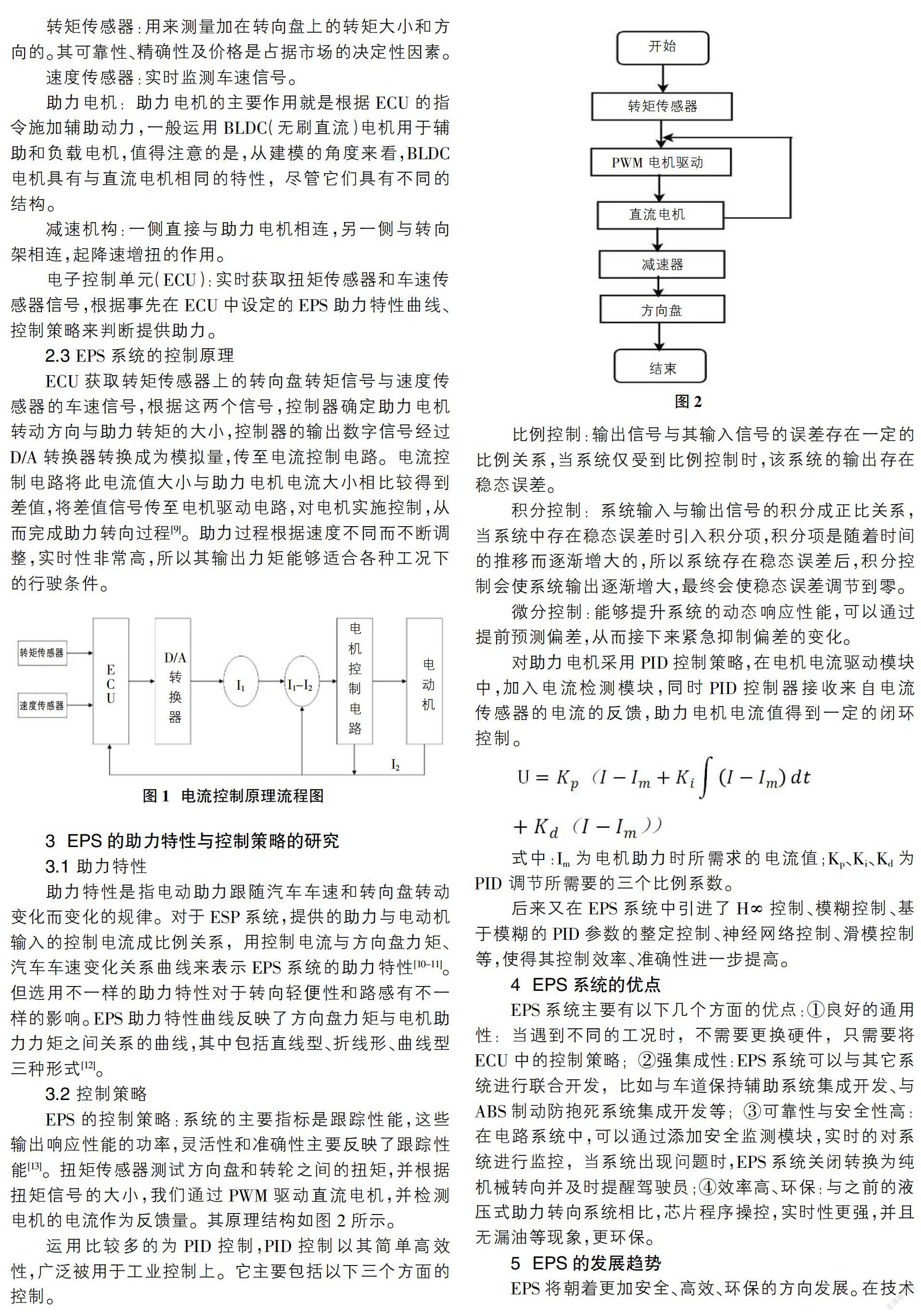
EPS的控制策略:系統的主要指標是跟蹤性能,這些輸出響應性能的功率,靈活性和準確性主要反映了跟蹤性能[13]。扭矩傳感器測試方向盤和轉輪之間的扭矩,并根據扭矩信號的大小,我們通過PWM驅動直流電機,并檢測電機的電流作為反饋量。其原理結構如圖2所示。
運用比較多的為PID控制,PID控制以其簡單高效性,廣泛被用于工業控制上。它主要包括以下三個方面的控制。
比例控制:輸出信號與其輸入信號的誤差存在一定的比例關系,當系統僅受到比例控制時,該系統的輸出存在穩態誤差。
積分控制:系統輸入與輸出信號的積分成正比關系,當系統中存在穩態誤差時引入積分項,積分項是隨著時間的推移而逐漸增大的,所以系統存在穩態誤差后,積分控制會使系統輸出逐漸增大,最終會使穩態誤差調節到零。
微分控制:能夠提升系統的動態響應性能,可以通過提前預測偏差,從而接下來緊急抑制偏差的變化。
對助力電機采用PID控制策略,在電機電流驅動模塊中,加入電流檢測模塊,同時PID控制器接收來自電流傳感器的電流的反饋,助力電機電流值得到一定的閉環控制。
式中:Im為電機助力時所需求的電流值;Kp、Ki、Kd為PID 調節所需要的三個比例系數。
后來又在EPS系統中引進了H∞控制、模糊控制、基于模糊的PID參數的整定控制、神經網絡控制、滑模控制等,使得其控制效率、準確性進一步提高。
4 ?EPS系統的優點
EPS系統主要有以下幾個方面的優點:①良好的通用性:當遇到不同的工況時,不需要更換硬件,只需要將ECU中的控制策略;②強集成性:EPS系統可以與其它系統進行聯合開發,比如與車道保持輔助系統集成開發、與ABS制動防抱死系統集成開發等;③可靠性與安全性高:在電路系統中,可以通過添加安全監測模塊,實時的對系統進行監控,當系統出現問題時,EPS系統關閉轉換為純機械轉向并及時提醒駕駛員;④效率高、環保:與之前的液壓式助力轉向系統相比,芯片程序操控,實時性更強,并且無漏油等現象,更環保。
5 ?EPS的發展趨勢
EPS將朝著更加安全、高效、環保的方向發展。在技術層次上,主要有:①冗余設計:在系統中,在關鍵元器件和起關鍵作用的地方,增加一套以上相同的部件,以補償當運行元器件受損時進行及時自動更替,使系統仍能正常工作;②線控轉向:在轉向盤與車輪之間采用柔性連接,以信號的形式進行轉向控制;③功能的擴展:更加多的和其他控制模塊進行集成化處理,使汽車元器件間的集成性更高,智能化水平也越高;④轉向截止點的設置:在轉向中,由于齒條等長度是有限的,所以存在終端的機械碰觸,損傷器件。在轉向達到終點之前,進行有必要的助力衰減,如同彈簧阻尼器的作用。
6 ?結論
本文對電動助力轉向系統進行了整體性的闡述,包括其基本結構、工作原理、國內外的研究現狀等,在結構進行了相關分析,要更多的去關注EPS系統的助力特性和控制策略,為使駕駛員擁有更好的舒適性和安全性。EPS今后的發展更集中在控制性能的提高、成本的降低以及可靠性、耐用性提高上。EPS系統未來汽車轉向系統的發展方向之一,我們也要在該領域投入更多的研究,為祖國汽車領域的發展投入自己的一份力。
參考文獻:
[1]陳家瑞.汽車構造[M].三版.北京:機械工業出版社,2009.
[2]趙斌.電動助力轉身系統建模仿真及電控單元的研究[D]. 湖南大學,2012.
[3]Chen J.S. Control of Electric Power Steering System[A].SAE Paper[C].
[4]AlaaMarouf, Mohamed Djemai, ChoukiSentouh, Philippe Pudlo. A New Control Strategy of an Electric- Power-Assisted Steering System[J]. IEEE Transactions on VehicularTechnology,2012,61(8):3574-3589.
[5]施國標,林逸,陳萬忠,等.電動助力轉向系統匹配設計的研究[J].公路交通科技,2003(10):125-128.
[6]陳奎元,馬小平,季學武.電動助力轉向系統控制技術的研究[J].江蘇大學學報(自然科學版),2004,25:21-24.
[7]黎志勇.汽車轉向系統技術發展探討[J].科技經濟導刊,2018(14):52-53.
[8]吳凱.汽車電動助力轉向系統及發展[J].汽車工程師,2012(3):15-16.
[9]王望予.汽車設計[M].四版. 北京:機械工業出版社,2004,8:244-249.
[10]劉照.汽車電動助力轉向系統動力學分析與控制方法研究[D].華中科技大學,2004.
[11]林逸,施國標,等.電動助力轉向助力控制策略的研究[J]. 汽車技術,2003(3):8-10.
[12]嚴汶均.電動助力轉向系統建模及控制算法研究[D].
[13]R. McCann,Variable Effort Steering for Vehicle Stability Enhancement Using an Electric Power Steering System, SAE, 2000.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36