基于差值定理的相位差變化率提取方法
2020-09-11 12:29:10劉文躍彭世蕤王廣學(xué)張逸楠
雷達(dá)科學(xué)與技術(shù) 2020年4期
劉文躍, 彭世蕤, 王廣學(xué), 張逸楠
(空軍預(yù)警學(xué)院, 湖北武漢 430019)
0 引言
基于相位差變化率的單站無源定位技術(shù),利用空中觀測(cè)平臺(tái)上干涉儀測(cè)量目標(biāo)輻射源到達(dá)信號(hào)的相位差,得到方位角變化率,結(jié)合目標(biāo)的方位角,就可以計(jì)算出目標(biāo)的位置(坐標(biāo))[1]。當(dāng)觀測(cè)平臺(tái)為小型無人機(jī)時(shí),大氣湍流易使載機(jī)發(fā)生飛行姿態(tài)擾動(dòng)[2],導(dǎo)致載機(jī)上的干涉儀基線矢量指向發(fā)生變化,對(duì)測(cè)量得到的相位差以及相位差變化率數(shù)據(jù)產(chǎn)生影響,針對(duì)這種情況,通常利用無人機(jī)導(dǎo)航數(shù)據(jù)中的姿態(tài)角數(shù)據(jù)對(duì)姿態(tài)變化后測(cè)量得到的相位差及其變化率數(shù)據(jù)進(jìn)行補(bǔ)償[3],以保證較高的定位精度。
這種補(bǔ)償方法的前提是無人機(jī)在姿態(tài)變化時(shí),得到的相位差變化率數(shù)據(jù)中需含有無人機(jī)姿態(tài)變化的信息。然而在實(shí)際應(yīng)用中,相位差變化率既可以直接測(cè)量得到,也可以間接提取得到[4],不同的提取方法會(huì)導(dǎo)致相位差變化率中的姿態(tài)信息豐富程度不同,從而姿態(tài)補(bǔ)償?shù)男Ч膊煌=?jīng)典的相位差變化率提取方法有差分法和卡爾曼濾波法[5],本文首先給出了這兩種提取方法下的姿態(tài)補(bǔ)償效果和定位精度,然后針對(duì)本文提出的基于差值定理的相位差變化率提取方法進(jìn)行了對(duì)比分析,結(jié)果表明本文方法具有更好的姿態(tài)補(bǔ)償效果和更高的定位精度。
1 單站無源定位姿態(tài)補(bǔ)償方法
圖1表示某時(shí)刻無人機(jī)定位態(tài)勢(shì),圖中以地面某固定點(diǎn)為坐標(biāo)原點(diǎn)建立固定坐標(biāo)系Oxy,Ox軸指向正東,無擾動(dòng)時(shí)默認(rèn)無人機(jī)沿正東作勻速直線運(yùn)動(dòng),出現(xiàn)風(fēng)擾動(dòng)時(shí)無人機(jī)將沿AB方向運(yùn)動(dòng);A表示無人機(jī)位置,T表示目標(biāo)位置,β表示目標(biāo)方位角,θ表示偏航角,對(duì)于地面固定目標(biāo),當(dāng)目標(biāo)與載機(jī)距離較遠(yuǎn)時(shí),可以忽略飛行高度的影響,等效至二維平面。

圖1 某時(shí)刻定位態(tài)勢(shì)示意圖
無人機(jī)姿態(tài)可用歐拉角(偏航角、俯仰角和滾轉(zhuǎn)角)描述。由于二維平面不考慮俯仰角,并且干涉儀位于無人機(jī)機(jī)身軸上,無人機(jī)發(fā)生滾轉(zhuǎn)時(shí)不會(huì)對(duì)相位差及其變化率的測(cè)量產(chǎn)生影響,因此本文中無人機(jī)姿態(tài)只需考慮偏航角θ。根據(jù)空間關(guān)系,基于干涉儀得到的相位差及其變化率為[6]

(1)

式(1)變形為
(2)
無人機(jī)無姿態(tài)變化,即θ=0時(shí)有
(3)

將式(2)代入式(3)中,得
(4)

2 基于經(jīng)典方法提取相位差變化率的定位精度分析
提取相位差變化率的經(jīng)典方法通常有差分法和卡爾曼濾波法,以下分析兩種方法提取相位差變化率中姿態(tài)信息的保留情況,以及定位精度。
2.1 差分法提取相位差變化率
應(yīng)用差分法提取相位差變化率數(shù)據(jù)的原理是利用(i-1)D~iD時(shí)刻內(nèi)相位差數(shù)據(jù)的平均變化速度來近似iD時(shí)刻的相位差變化率[7]。即
(5)
式中,D表示差分運(yùn)算時(shí)間間隔。用該方法提取相位差變化率較為簡單。
2.2 卡爾曼濾波法提取相位差變化率
利用卡爾曼濾波法直接提取相位差變化率數(shù)據(jù)的基本思想是,一方面對(duì)輸入的已解模糊相位差數(shù)據(jù)進(jìn)行平滑,降低測(cè)量噪聲,另一方面實(shí)時(shí)給出相位差變化率數(shù)據(jù)的濾波值[8]。由于該方法較為經(jīng)典,濾波原理本文不作贅述。
2.3 兩種方法的定位精度分析
下面通過仿真實(shí)驗(yàn)分析差分法和卡爾曼濾波法提取相位差變化率時(shí)的效果。
無人機(jī)基本仿真參數(shù)設(shè)置:如圖1所示,無人機(jī)平行大地平面作勻速直線運(yùn)動(dòng),飛行速度為150 m/s,無人機(jī)初始位置為(0,0)。另外在無人機(jī)運(yùn)動(dòng)學(xué)模型中引入傳感器自身帶來的測(cè)量誤差,設(shè)為在橫、縱向速度分量誤差滿足均值為0,方差為0.5 m/s的高斯分布。
無人機(jī)姿態(tài)擾動(dòng)仿真設(shè)置:無人機(jī)姿態(tài)擾動(dòng)一般是風(fēng)擾動(dòng)造成的,為了令仿真結(jié)果更貼合實(shí)際,本文引用Dryden大氣紊流模型[9]模擬風(fēng)擾動(dòng),近似認(rèn)為風(fēng)擾動(dòng)對(duì)無人機(jī)姿態(tài)影響是線性的,即無人機(jī)在風(fēng)擾動(dòng)下的姿態(tài)角數(shù)據(jù)也服從Dryden模型,并根據(jù)實(shí)際情況設(shè)置姿態(tài)角變化最大不超過3°。模擬得到的姿態(tài)角數(shù)據(jù)片段如圖3所示,圖中橫軸表示時(shí)間,縱軸表示偏航角大小。可以看出,模擬得到的偏航角數(shù)據(jù)既具有隨機(jī)性又不失前后時(shí)刻相關(guān)性,更加貼合實(shí)際。

圖3 無人機(jī)偏航角模擬片段
定位模型基本仿真參數(shù)如下:地面固定雷達(dá)目標(biāo)工作頻率fT=3 GHz,目標(biāo)位置處于(100,50)km,目標(biāo)雷達(dá)脈沖重復(fù)頻率設(shè)置為500 Hz,即定位點(diǎn)采樣間隔為2 ms,導(dǎo)航數(shù)據(jù)更新頻率設(shè)置為20 Hz,干涉儀基線OA長度為1 m。
差分法參數(shù)設(shè)置:令D=20 ms為差分時(shí)間片間隔進(jìn)行差分運(yùn)算。
卡爾曼濾波法參數(shù)設(shè)置:實(shí)現(xiàn)卡爾曼濾波公式的遞推過程,首先需要相位差數(shù)據(jù)初值U0和相位差數(shù)據(jù)的均方誤差初值C0,并且初值的選取會(huì)影響卡爾曼濾波的收斂時(shí)間、預(yù)測(cè)精度等性能[10]。U0的確定采用隨機(jī)選取一段相位差樣本進(jìn)行事先觀測(cè)并取均值的方法確定,通過這種方法計(jì)算得到的一組初值為U0=50 rad;由于C0是誤差初值,在沒有誤差經(jīng)驗(yàn)值的情況下,一般認(rèn)為U0的選取不存在誤差,因此令C0=0。
仿真結(jié)果如圖4所示。

圖4 兩種提取方法的提前效果對(duì)比
可以看出,利用差分法提取得到的相位差變化率抖動(dòng)明顯,可以認(rèn)為該方法能較好保留相位差變化率中的姿態(tài)信息;利用卡爾曼濾波法提取得到的相位差變化率在收斂后趨于平滑,即將無人機(jī)姿態(tài)抖動(dòng)帶來的影響視為噪聲進(jìn)行了濾波降噪處理,從而導(dǎo)致了相位差變化率中的姿態(tài)信息受到了較為嚴(yán)重的破壞。
為量化仿真結(jié)果,定義定位誤差和平均定位相對(duì)誤差如下:
(6)
(7)
式中:xT,yT為目標(biāo)真實(shí)位置的橫、縱坐標(biāo);x′T,y′T為計(jì)算得到的橫、縱坐標(biāo);ri為i時(shí)刻目標(biāo)與無人機(jī)間的徑向距離;t為無人機(jī)執(zhí)行定位任務(wù)總時(shí)長。
當(dāng)D、U0取不同值時(shí),兩種方法提取相位差變化率時(shí)的定位誤差如表1所示。
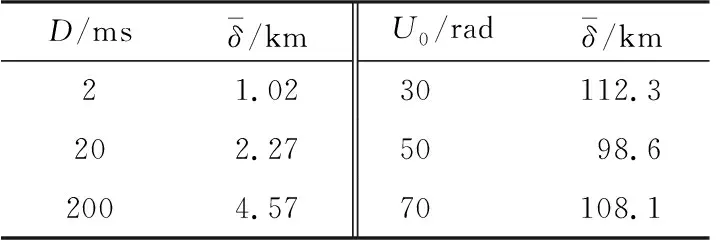
表1 不同條件下兩種方法定位誤差對(duì)比
從表1可以看出,D越小,定位誤差越小,定位精度就越高。這是因?yàn)樘崛∠辔徊钭兓实倪^程實(shí)際上就是數(shù)值微分的過程,若期望提取出的相位差變化率中含有較為完整的姿態(tài)信息,則需要讓數(shù)值微分的求解盡可能準(zhǔn)確,顯然當(dāng)差分法中的D趨于無窮小時(shí),數(shù)值微分的求解是趨于準(zhǔn)確的,但是受目標(biāo)雷達(dá)脈沖重復(fù)頻率fPRF的限制,D最小只能取到1/fPRF;此外差分法的前提是認(rèn)為在差分時(shí)間片間隔中,相位差變化率的值是恒定的,即在相位差變化率呈現(xiàn)線性或近似線性變化時(shí),差分法提取方法較好[11]。但是在無人機(jī)姿態(tài)擾動(dòng)時(shí),相位差變化顯然呈現(xiàn)非線性,因此無人機(jī)存在姿態(tài)擾動(dòng)時(shí),利用差分法提取相位差變化率存在一定的局限性。
從表1還可以看出,初值的選取對(duì)卡爾曼濾波的影響較大,并且經(jīng)過計(jì)算得到的最佳初值為55 rad,并且初值的選取越靠近最佳初值,卡爾曼濾波的效果越好。但是卡爾曼濾波的平滑功能濾除了相位差變化率中本該含有的部分姿態(tài)信息,因此無論初值選取是否準(zhǔn)確,在采用姿態(tài)補(bǔ)償時(shí),定位誤差都非常大。
3 基于差值定理的相位差變化率提取方法
通過第2節(jié)的分析可知,要想令姿態(tài)補(bǔ)償達(dá)到較好的效果就必須盡可能多地保留相位差變化率中的姿態(tài)信息,從數(shù)學(xué)的角度來說即要求對(duì)相位差的數(shù)值微分盡可能準(zhǔn)確,而差值定理的提出將微分算法的效果從“無限逼近”提高到“理論上相等”。因此本文采用差值定理提取相位差變化率。
差值定理的基本內(nèi)容是:設(shè)函數(shù)F(t)和f(t)在某定義域Ω內(nèi)任一點(diǎn)均存在n階導(dǎo)數(shù),且G(t)=F(n-1)(t)-f(n-1)(t),則F(n)(t0)=f(n)(t0)?G′(t0)=0。
文獻(xiàn)[11]中將差值定理的物理意義描述為:2個(gè)函數(shù)的n-1階導(dǎo)數(shù)的差值的駐點(diǎn)是它們的n階導(dǎo)數(shù)相等的點(diǎn);2個(gè)函數(shù)差值曲線的駐點(diǎn)是它們的一階導(dǎo)數(shù)相等的點(diǎn)。因此,在假設(shè)測(cè)量數(shù)據(jù)和擬合數(shù)據(jù)均滿足處處可導(dǎo)的條件時(shí),只需求出測(cè)量得到的相位差數(shù)據(jù)和擬合得到的相位差數(shù)據(jù)差的極值點(diǎn),即可把擬合數(shù)據(jù)在極值點(diǎn)處的一階導(dǎo)數(shù)作為該點(diǎn)的相位差變化率提取值。那么該方法的核心在于對(duì)相位差數(shù)據(jù)的擬合以及差值數(shù)據(jù)極值的判別。
3.1 對(duì)相位差數(shù)據(jù)的擬合
對(duì)于數(shù)據(jù)擬合,本文采用基于三階多項(xiàng)式的最小二乘法濾波[12]進(jìn)行擬合,即將相位差在不長的時(shí)間內(nèi)的變化情況表示為

ti=-N,…,N
(8)
式中,φ′(ti)表示擬合得到的相位差,N表示濾波半徑,i表示第i次濾波。
再根據(jù)最小二乘濾波的基本原理估計(jì)出系數(shù)[ai,bi,ci,di]即可。在應(yīng)用過程中,令濾波半徑不變,并以N為步長對(duì)相位差數(shù)據(jù)進(jìn)行滑動(dòng)濾波,將各步得到的相位差擬合數(shù)據(jù)拼接即完成了對(duì)相位差數(shù)據(jù)的擬合。
采用這種擬合方法最大的好處在于能夠?qū)懗鰯M合數(shù)據(jù)的顯式函數(shù)表達(dá)式,并且對(duì)其求一階導(dǎo)數(shù)十分簡單,即
ti=-N,…,N
(9)
3.2 差值數(shù)據(jù)極值的判別
根據(jù)極大值和極小值的定義,第i點(diǎn)是極大值的充要條件:
(10)
第i點(diǎn)是極小值的充要條件:
(11)
式中,C(ti)=φ(ti)-φ′(ti),即相位差的差值函數(shù),S表示誤差限,即允許存在的最大測(cè)量誤差,在要求高精度測(cè)量時(shí),一般取S=0。
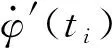
理論上通過以上極值判別方法即可判別出極值點(diǎn),再將極值點(diǎn)代入式(9)即可得到較為準(zhǔn)確的相位差變化率數(shù)據(jù)。然而由于擬合曲線與原數(shù)據(jù)曲線不完全匹配以及濾波半徑的選取等原因,判別出的極值點(diǎn)數(shù)小于測(cè)量數(shù)據(jù)點(diǎn)數(shù)。令S=0,其他仿真條件不變時(shí),改變?yōu)V波半徑N時(shí),得到的極值點(diǎn)情況如表2所示。
表2 濾波半徑不同時(shí)的極值點(diǎn)求解情況
從表2可以看出,濾波半徑改變雖然會(huì)影響求解的極值點(diǎn)的點(diǎn)數(shù),但是求解得到的極值點(diǎn)數(shù)總是小于測(cè)量數(shù)據(jù)的點(diǎn)數(shù),從物理意義來說,這會(huì)導(dǎo)致得到的相位差變化率數(shù)據(jù)在時(shí)間上不連續(xù),不利于進(jìn)行姿態(tài)補(bǔ)償。
根據(jù)文獻(xiàn)[11],可以采用系數(shù)調(diào)節(jié)法,使每個(gè)測(cè)量數(shù)據(jù)時(shí)刻點(diǎn)都成為駐點(diǎn)。即保持ai,di固定不變,令bi,ci滿足如下關(guān)系式:
(12)
根據(jù)式(12)能夠使相位差的擬合曲線與相位差測(cè)量曲線在極值點(diǎn)附近的曲率盡可能相等,即保證了解算出的極值點(diǎn)數(shù)等于測(cè)量數(shù)據(jù)點(diǎn)數(shù),從而保證率求解出的相位差變化率的時(shí)間連續(xù)性。
3.3 相位差變化率提取流程
總結(jié)前文,基于差值定理的相位差變化率提取方法的步驟如圖5所示。

圖5 相位差變化率提取新方法流程圖

該方法的仿真參數(shù)設(shè)置為:擬合多項(xiàng)式階數(shù)選取三階,濾波半徑選取N=5,并假設(shè)測(cè)量得到的相位差數(shù)據(jù)在時(shí)間上連續(xù)。該方法的相位差變化率提取效果片段如圖6所示。
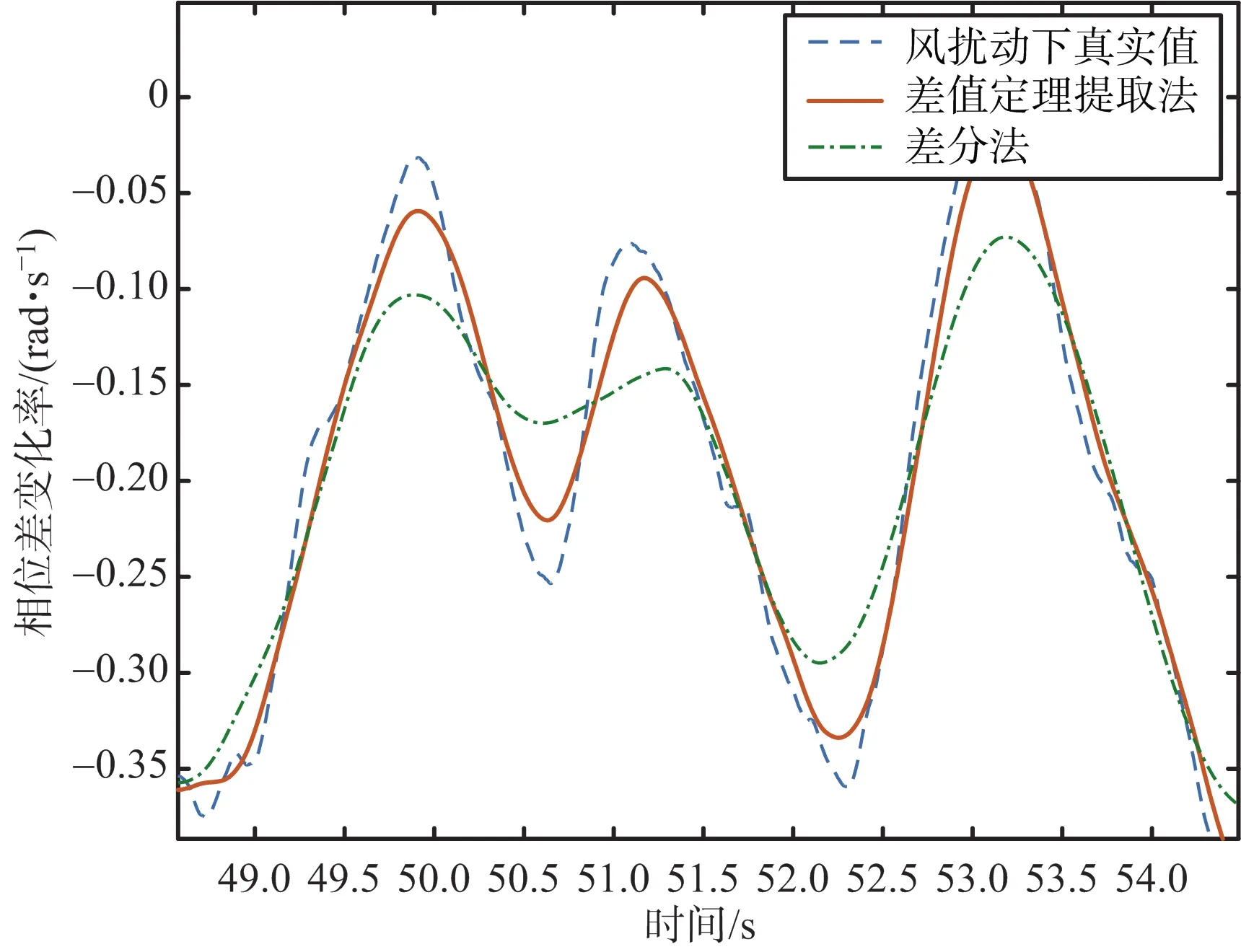
圖6 不同方法提取效果對(duì)比示意圖
從圖6可以看出,與差分法相比,差值定理提取法提取得到的相位差變化率更加貼近風(fēng)擾動(dòng)下相位差變化率的真實(shí)值,與風(fēng)擾動(dòng)下相位差變化率的真實(shí)值相比,D=1 ms時(shí)差分法提取時(shí)的相位差變化率均方誤差為0.084 rad/s,而差值定理提取時(shí)的誤差為0.032 rad/s,說明了該方法的有效性。經(jīng)過計(jì)算后的定位相對(duì)誤差如表3所示。

表3 差值定理法定位誤差對(duì)比
從表3可以看出,與差分法相比,在無人機(jī)姿態(tài)補(bǔ)償時(shí),利用差值定理法提取相位差變化率時(shí)的定位精度得到提高,定位誤差基本保持在2%以內(nèi)。
從運(yùn)算時(shí)間看,在文中仿真條件下,相位差數(shù)據(jù)點(diǎn)數(shù)為50 000時(shí),差分法、卡爾曼濾波法和差值定理法所需的時(shí)間分別為0.19,2.45和3.91 s,而根據(jù)文中設(shè)置,接收50 000個(gè)相位差數(shù)據(jù)點(diǎn)需要100 s,顯然遠(yuǎn)大于這三種方法的計(jì)算時(shí)間,說明3種方法均具備很高的實(shí)時(shí)性。而本文方法更具高定位精度的優(yōu)點(diǎn)。
4 結(jié)束語
本文針對(duì)現(xiàn)有相位差變化率提取方法提取得到的相位差變化率數(shù)據(jù)中觀測(cè)平臺(tái)姿態(tài)信息較少,導(dǎo)致利用觀測(cè)平臺(tái)姿態(tài)數(shù)據(jù)進(jìn)行無源定位姿態(tài)補(bǔ)償時(shí)精度較低的問題,提出了一種基于差值定理的相位差變化率提取方法,并對(duì)比分析了差分法、卡爾曼濾波法和本文方法提取相位差變化率時(shí)的姿態(tài)補(bǔ)償精度。研究表明,本文方法能夠提高單站無源定位的姿態(tài)補(bǔ)償精度,對(duì)觀測(cè)平臺(tái)發(fā)生姿態(tài)擾動(dòng)時(shí)單站無源定位性能的提升具有指導(dǎo)意義。
猜你喜歡
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36
