靜止軌道衛(wèi)星遠程交會策略設(shè)計
2020-09-14 07:48:08胡海霞解永春胡錦昌
宇航學(xué)報 2020年8期
劉 濤,胡海霞,解永春,胡錦昌
(1. 北京控制工程研究所,北京 100094;2. 空間智能控制技術(shù)國家級重點試驗室,北京 100094)
0 引 言
高軌道衛(wèi)星尤其是靜止軌道衛(wèi)星,由于地面覆蓋區(qū)域大,所以在通訊、遙感、數(shù)據(jù)中繼、衛(wèi)星導(dǎo)航等領(lǐng)域發(fā)揮著重要的作用。長壽命、高可靠性是高軌道衛(wèi)星的重要特征,但受平臺燃料攜帶量的制約,燃料耗盡已成為靜止軌道衛(wèi)星整體失效的主要原因[1]。此外,靜止軌道的唯一性決定了靜止軌道所能夠容納衛(wèi)星的數(shù)量十分有限,故障失效的靜止軌道衛(wèi)星長期占用功能軌道,造成極大的資源浪費。通過發(fā)射在軌服務(wù)航天器,執(zhí)行高軌道衛(wèi)星在軌延壽以及故障衛(wèi)星離軌操作,成為高軌道衛(wèi)星技術(shù)發(fā)展的重要方向[2],美歐等航天機構(gòu)均積極開展了相關(guān)研究[3-5]。
高軌道在軌服務(wù)任務(wù)必須完成相對目標航天器的交會操作。交會過程可分為遠程交會段和近程自主交會段兩部分。遠程交會段是指將追蹤器從入軌初始軌道導(dǎo)引到近程自主交會段要求的預(yù)定軌道,并滿足一定的相對運動約束的飛行階段[6]。目前,人類所進行的交會對接主要集中在近地軌道,廣泛使用的遠程交會策略有兩類:一類是特殊點變軌策略,即在遠地點提升近地點高度,升交點修正軌道傾角等;另一類是綜合變軌策略,即變軌點不局限于特殊點,同時修正軌道平面內(nèi)外偏差[7]。雖然存在一定初始軌道面偏差時,綜合變軌較特殊點變軌節(jié)省推進劑消耗,但是特殊點變軌的軌控位置較固定,物理意義更加明確,因此得到廣泛的應(yīng)用[8]。近地軌道多采用2~3天(飛行超過30圈)交會策略,例如中國SZ系列飛船的遠程交會方案采用5脈沖軌控,持續(xù)時間約為28圈[9]。2~3天交會策略持續(xù)時間較長,給航天員和地面操控都造成較大壓力。近年來,快速交會對接成為理論研究[10-11]和工程實踐的熱點,俄羅斯和中國均已成功實現(xiàn)了近地軌道6 h快速交會在軌飛行[12]。
目前,對靜止軌道衛(wèi)星遠程交會的公開研究報道還比較少。梁斌等[13]提出在可實現(xiàn)相對測量的前提下,采用C-W方程,設(shè)計帶制導(dǎo)精度約束和雙視線夾角約束的分布式多脈沖優(yōu)化制導(dǎo),實現(xiàn)遠程交會。孫振江[14]同樣基于C-W方程,研究了靜止軌道共位約束下多脈沖接近軌跡安全規(guī)劃問題。Barbee等[15]采用共面橢圓交會策略設(shè)計了相距300 km以內(nèi)的交會策略。Li等[16]采用多脈沖Hohmann軌控進行高軌道衛(wèi)星遠程交會相位調(diào)節(jié)策略設(shè)計。Yu等[17]基于混合最優(yōu)控制理論研究了靜止軌道空間碎片清理的優(yōu)化調(diào)度問題。
對靜止軌道在軌服務(wù)任務(wù),由于軌道運行周期長(周期為24 h),若沿用近地軌道2~3天交會策略(飛行超過30圈),則遠程交會過程過長,無法滿足實際任務(wù)的時效性要求,因此有必要采用快速交會策略;此外,靜止軌道半長軸超過40000 km,遠程交會相對距離可達數(shù)千千米,很難建立相對測量,也不滿足相對動力學(xué)方程(如C-W方程)的應(yīng)用范圍,采用基于絕對定軌的軌控策略設(shè)計遠程交會方案更為適合。基于近圓偏差方程的變軌規(guī)劃是綜合變軌策略的經(jīng)典方法,在近地軌道交會任務(wù)中得到成功應(yīng)用[18]。本文將該方法應(yīng)用于GEO衛(wèi)星遠程交會設(shè)計,并通過改進迭代制導(dǎo)求解中的制導(dǎo)誤差求解方式,對傳統(tǒng)基于近圓偏差方程的變軌規(guī)劃策略進行改進,提高了制導(dǎo)精度。具體而言,本文針對高軌道衛(wèi)星在軌服務(wù)任務(wù),提出了一種4脈沖遠程快速交會規(guī)劃方法,可在5圈內(nèi)完成遠程交會過程。調(diào)相設(shè)計中,通過對傳統(tǒng)基于近圓偏差方程的變軌規(guī)劃策略進行改進,設(shè)計得到了3脈沖調(diào)相方案。首先,固定第1和第2調(diào)相脈沖執(zhí)行位置,對3個調(diào)相脈沖的速度增量及第3調(diào)相脈沖的執(zhí)行位置進行設(shè)計優(yōu)化;再固定第1調(diào)相脈沖,對第2和第3調(diào)相脈沖的速度增量和執(zhí)行位置進行再次優(yōu)化。軌道面調(diào)整設(shè)計中,通過求解軌道面節(jié)線位置,采用單一法向脈沖進行軌道面修正。
1 近圓偏差相對動力學(xué)方程
設(shè)定一個參考圓軌道上運行的航天器(稱為參考航天器,其軌道系為OEXrefYrefZref)。基于參考航天器軌道建立圓柱坐標系(見圖1):原點為地心OE,X軸指向為參考軌道升交點赤經(jīng),Z軸指向參考軌道角動量方向,Y軸與X軸和Z軸符合右手原則。在圓柱坐標系,采用極坐標描述航天器運動:r為航天器位置矢量rs在參考軌道面投影的模值;θ為X軸到航天器位置矢量在參考軌道面投影的幅角,逆時針為正;z為追蹤器位置矢量在Z軸的投影。在圓柱坐標系中,航天器的軌道運動方程為[18]

圖1 圓柱坐標系示意圖

(1)

(2)
對應(yīng)的t0和t時刻狀態(tài)方程為:
X(t)=Φ(t,t0)X(t0)
(3)
式中:
(4)
Φv(t,t0)為Φ(t,t0)的4~6列,sα=sinα,cα=cosα,α=ωref(t-t0)為角距,ωref為參考航天器的軌道角速度。
2 遠程交會軌控規(guī)劃方法
基于近圓偏差相對動力學(xué)方程,通過設(shè)定不同的調(diào)相優(yōu)化參數(shù),李革非[18]給出了兩類調(diào)相規(guī)劃方程,并且給出了相應(yīng)的迭代求解策略。該策略采用追蹤器到達瞄準點同相位時刻構(gòu)造切向位置差,其優(yōu)勢是算法收斂快,但是誤差較大。本文在該收斂解的基礎(chǔ)上,通過采用追蹤器終端時刻的相對位置計算精確切向位置差用于再次迭代計算,以改進制導(dǎo)精度。以下首先介紹調(diào)相規(guī)劃方程和基于近圓偏差方程的經(jīng)典規(guī)劃方法,再對改進后的變軌策略規(guī)劃方法進行說明。
2.1 調(diào)相規(guī)劃基本方程
1)面內(nèi)3跡向脈沖及第3脈沖執(zhí)行位置規(guī)劃方程
設(shè)調(diào)相僅采用切向脈沖,且第1脈沖和第2脈沖分別在遠地點和近地點執(zhí)行(即第1和第2切向脈沖距離瞄準位置的角距α1和α2為已知),規(guī)劃變量為Δvt1,Δvt2,Δvt3,α3。采用近圓偏差相對方程進行規(guī)劃[18]:
(5)
其中,
XA為瞄準點的狀態(tài),Xk為無控狀態(tài)下的時間遞推狀態(tài)。
角距α3滿足非線性方程
(6)
通過求解該非線性方程可以得到α3,進而可以得到各次脈沖為:
(7)
(8)
(9)
2)面內(nèi)2跡向脈沖及執(zhí)行位置規(guī)劃方程
設(shè)調(diào)相僅采用切向脈沖,同時對脈沖增量和執(zhí)行位置進行規(guī)劃,規(guī)劃變量為Δvt1,Δvt2,α1,α2。同樣采用近圓偏差相對方程進行規(guī)劃。
α1,α2滿足以下非線性方程組:
(10)
通過求解以上非線性方程組得到α1,α2后,得到脈沖量
(11)
(12)
2.2 基于近圓偏差方程的變軌策略規(guī)劃
采用第2.1節(jié)給出了兩種不同規(guī)劃方程,需要基于一定的規(guī)劃策略得到最優(yōu)收斂解。李革非[18]給出了一種基于近圓偏差方程的變軌策略規(guī)劃,步驟如下所述。
步驟1:外推目標器軌道至瞄準點時刻tA,計算參考軌道和期望瞄準點間的相對狀態(tài)XA。

步驟3:據(jù)δXk-1求解近圓偏差方程,轉(zhuǎn)化為控制量。


步驟6:賦值δXk=δXk-1+δXk,轉(zhuǎn)步驟3(賦值k=k+1)。
2.3 改進的基于近圓偏差方程的變軌策略規(guī)劃
基于近圓偏差方程的變軌策略規(guī)劃中,步驟4采用時間差tA-tu,構(gòu)造追蹤器tA時刻位置與瞄準點間的切向位置差δX(2)=arefωref(tA-tu),所得到切向相位位置差與真實值有一定誤差,進而會影響制導(dǎo)精度。為此,本文在步驟4中通過采用追蹤器終端時刻的相對位置計算精確切向位置差用于迭代計算,可改進制導(dǎo)精度。改進算法計算步驟如下所述。
步驟1:外推目標器軌道至瞄準點時刻tA,計算參考軌道和期望的瞄準點相對狀態(tài)XA。
步驟3:依據(jù)δXk-1求解近圓偏差方程,轉(zhuǎn)化為控制量。


步驟6:賦值δXk=δXk-1+δXk,轉(zhuǎn)步驟3 (并置k=k+1)。
2.4 軌道面修正策略
(13)
(14)

(15)
脈沖的執(zhí)行位置(緯度幅角)u由lct確定。
3 遠程交會軌控規(guī)劃策略設(shè)計
設(shè)定在軌服務(wù)航天器在亞靜止軌道進行巡航飛行,需要執(zhí)行在軌服務(wù)任務(wù)時由地面/自主啟動與靜止軌道目標的交會流程。執(zhí)行軌道機動前首先必須進行精確地面定軌,設(shè)定進行交會前進行1個軌道周期的軌道測定,交會流程從第2圈開始執(zhí)行。遠程交會采用3切向脈沖進行軌道面內(nèi)調(diào)相,1法向脈沖進行軌道面修正。快速交會任務(wù)的遠程交會規(guī)劃方案如表1所示。
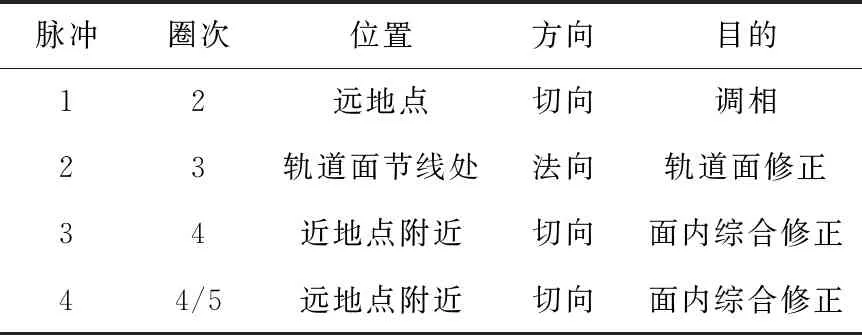
表1 遠程導(dǎo)引軌控方案
遠程交會軌控規(guī)劃計算,共進行3次迭代優(yōu)化,具體計算流程如下(圖2為流程圖):
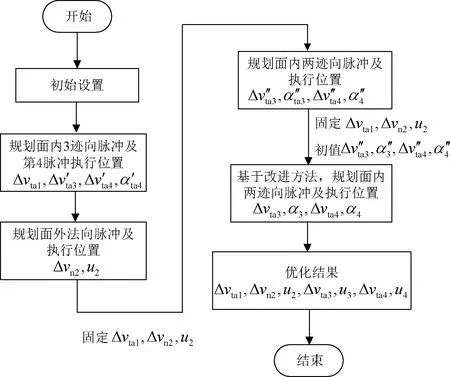
圖2 遠程交會制導(dǎo)規(guī)劃流程
1)第1次迭代優(yōu)化。設(shè)調(diào)相均采用切向修正,且Δvta1,Δvta3分別在第2圈遠地點和第4圈近地點執(zhí)行,采用基于近圓偏差方程的變軌策略規(guī)劃方法(見第2.2節(jié)),對跡向脈沖及第4脈沖的執(zhí)行位置(距離瞄準點的角距)進行規(guī)劃,結(jié)果記為Δvta1,Δv′ta3,Δv′ta4,α′4。
2)軌道面修正。根據(jù)脈沖Δvta1,采用精確軌道動力學(xué)進行外推。依據(jù)脈沖執(zhí)行后的軌道參數(shù),按照軌道面修正方法(見第2.4節(jié)),計算得到vn2和對應(yīng)的軌控位置u2(緯度幅角)。
3)第2次迭代優(yōu)化。由于軌道面修正會對面內(nèi)軌道參數(shù)造成影響,因此采用面外與面內(nèi)解耦設(shè)計會帶來誤差。為此,根據(jù)脈沖Δvta1和vn2,采用精度動力學(xué)方程外推計算得到脈沖1和脈沖2執(zhí)行后的軌道參數(shù)。采用基于近圓偏差方程的變軌策略規(guī)劃方法(見第2.2節(jié)),對脈沖3和4及其執(zhí)行位置進行規(guī)劃,結(jié)果記為Δv″ta3,Δv″ta4,α″3,α″4。
4)第3次迭代優(yōu)化。為提高制導(dǎo)精度,繼續(xù)采用改進的基于近圓偏差方程的變軌策略規(guī)劃方法(見第2.3節(jié)),根據(jù)脈沖Δvta1,vn2,u2,基于精確動力學(xué)方程外推計算得到脈沖1和脈沖2執(zhí)行后的軌道參數(shù),以Δv″ta3,Δv″ta4,α″3,α″4作為初始值,對脈沖3和4及其執(zhí)行位置進行再次規(guī)劃。結(jié)果記為Δvta3,Δvta4,α3,α4。
5)將軌控位置轉(zhuǎn)換為對應(yīng)圈次的緯度幅角,最終規(guī)劃結(jié)果為Δvta1,Δvn2,u2,Δvta3,u3,Δvta4,u4。
4 仿真分析
設(shè)定目標航天器位于靜止軌道,在軌服務(wù)航天器經(jīng)地面導(dǎo)引已經(jīng)進入低于目標器軌道400 km的漂移軌道。規(guī)劃初始時刻為2019年10月14日05∶30∶0.00(BJT),對應(yīng)軌道圈次為1,以衛(wèi)星經(jīng)過升交點作為軌道圈次累加條件。軌道動力學(xué)采用20×20階地球非球形攝動模型并考慮太陽和月球引力攝動,軌道控制采用脈沖方式實施。設(shè)定目標交會時間為tA=345600 s(4天)。遠程交會的控制目標為:在tA時刻捕獲瞄準點(目標器VVLH系中的相對位置和速度)XA=[-25km00000]T。兩航天器的初始軌道參數(shù)見表2。

表2 初始軌道參數(shù)
4.1 遠程導(dǎo)引軌控結(jié)果分析
到達初始瞄準點時刻tA時,服務(wù)航天器在目標器VVLH軌道系中的相對狀態(tài)見表3,依據(jù)遠程交會軌控方案計算得到的軌控參數(shù)見表4,飛行過程運動參數(shù)見圖3~7。由仿真結(jié)果可知,初始瞄準點時刻時,相對位置控制誤差優(yōu)于100 m,速度控制誤差優(yōu)于0.01 m/s,精度滿足轉(zhuǎn)入近程自主交會的要求。軌控速度增量為20.1 m/s。

表3 瞄準點時刻的相對狀態(tài)
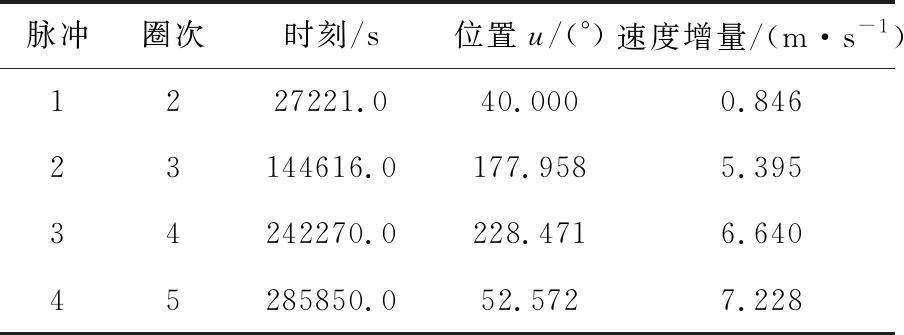
表4 軌控執(zhí)行位置和速度增量

圖3 飛行過程的面內(nèi)軌道參數(shù)

圖4 飛行過程的軌道面參數(shù)

圖5 軌道系相對運動軌跡(X-Z)
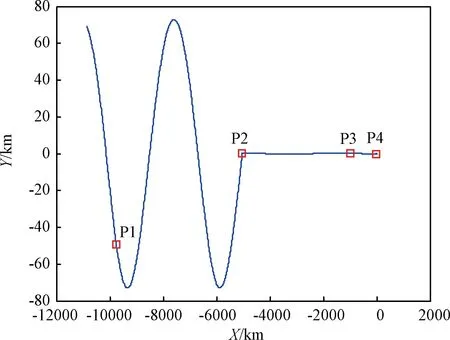
圖6 軌道系相對運動軌跡(X-Y)

圖7 軌道系相對運動速度
4.2 初始相位角差與速度增量變化分析
不同初始相位角差對總速度增量和各次軌控的速度增量有明顯影響。為此,通過改變在軌服務(wù)航天器的初始真近點角,分析了不同初始相位差時的軌控速度增量,見圖8和圖9。由圖8可知,初始相位差與總速度增量呈正相關(guān)。小于16°時總速度增量趨于恒定,初始相位差超過16°后,則總速度增量快速增大。這是由于初始相位角差較大時,為追趕相位需要降低軌道高度,從而造成先降軌再升軌的情況,增加了燃料消耗。由圖9可知,隨著初始相位的增大,第1次脈沖由升軌轉(zhuǎn)變?yōu)榻弟墸?次脈沖則由降軌轉(zhuǎn)變?yōu)樯墸?脈沖的變化不大。這是由于初始相位大時保持較低的軌道高度更加有利于追趕相位,而在第4次軌控時才集中抬升軌道所致。實際工程設(shè)計中采用有限推力實施軌控,為保證遠程交會精度,通常不希望最后一次軌控的速度增量過大而影響執(zhí)行精度。為保證遠程交會精度并確保燃料消耗最小,初始相位差應(yīng)該限定在16°以內(nèi)。

圖8 不同初始相位差時的脈沖速度增量

圖9 不同初始相位差時的軌控總速度增量
5 結(jié) 論
論文針對靜止軌道衛(wèi)星在軌服務(wù)任務(wù),對遠程交會軌控規(guī)劃方案進行了研究。采用近圓偏差方程的變軌策略規(guī)劃,提出了一種4脈沖遠程快速交會規(guī)劃方案,可在5圈內(nèi)實現(xiàn)遠程交會。調(diào)相設(shè)計中,通過對傳統(tǒng)基于近圓偏差方程的變軌規(guī)劃策略進行改進,設(shè)計得到了3脈沖調(diào)相方案。軌道面調(diào)整設(shè)計中,通過求解軌道面節(jié)線位置,采用單一法向脈沖進行軌道面修正。所提出的方法可作為實施高軌道衛(wèi)星快速交會任務(wù)的技術(shù)參考。
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
公民與法治(2020年11期)2020-07-25 02:02:06
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41