基于模糊PID的送桿機構同步控制建模與仿真研究*
2020-09-22 09:07:20李群明高志偉
機電工程 2020年9期
關鍵詞:系統(tǒng)
周 圍,李群明,2,3,高志偉,謝 帥
(1.中南大學 機電工程學院,湖南 長沙 410083; 2.中南大學 輕合金研究院,湖南 長沙 410083; 3.中南大學 高性能復雜制造國家重點實驗室,湖南 長沙 410083)
0 引 言
某課題組所設計的巖心取樣鉆機用送桿機構主要用于輸送桿件到固定位置,輔助鉆機完成自動接桿操作。其中,送桿機構的送桿過程由對稱安裝的兩個運送油缸驅動。為保障送桿過程平穩(wěn)、位置精確,需要實現(xiàn)兩缸多點位精度同步控制,且誤差應小于1 mm。
為了提高系統(tǒng)的同步控制精度,相關學者做了大量研究。許勇[1]指出了液壓同步控制主要有“同等方式”和“主從方式”,而“主從方式”因從動系統(tǒng)輸出跟蹤主動系統(tǒng)具有延時性,會出現(xiàn)較大的動態(tài)同步誤差;針對回收機掃油臂與卷筒雙馬達同步控制問題,楊前明等[2]提出了一種“同等控制”結合模糊神經(jīng)網(wǎng)絡的同步控制器,系統(tǒng)同步精度高、無超調(diào);針對鍛造機雙缸同步提升系統(tǒng),吳娜等[3]提出了一種單神經(jīng)元PID和交叉耦合的同步控制算法,系統(tǒng)的收斂性快、魯棒性好;針對非對稱液壓缸與負載形成運動閉鏈而導致力耦合問題,竇海斌[4]設計出了一種魯棒自適應跟蹤控制器;針對多缸組成的同步提升系統(tǒng),DONG Li-jing等[5]提出了一種大型舉升系統(tǒng)的分布式控制策略,通過各缸的分布式控制器達到了耦合同步;針對提升裝置同步誤差對盾構管片拼裝質(zhì)量的影響,彭雄斌等[6]提出了一種雙比例閥模糊PID控制方法,提高了兩缸同步精度;針對海洋工程中大型結構塊對接的多缸同步問題,成思銘等[7]提出了一種多缸耦合的模糊PID控制方法,避免了系統(tǒng)加減速的同步波動;針對拉床中兩缸臥室電液同步系統(tǒng)具有線性和非線性級聯(lián)問題,CHEN Guo-jin[8]等提出了一種IPSO-PID同步控制器,并引入了改進型粒子群優(yōu)化算法。
上述方法雖然可實現(xiàn)兩缸精確同步控制,但存在建模和控制算法復雜、工程實用性差等問題,難以滿足送桿機構的實際需求。
針對上述不足,筆者提出送桿機構的送桿過程同步控制方案,并通過同等方式建立送桿過程數(shù)學模型和兩缸閉環(huán)同步控制系統(tǒng)模型,然后設計模糊PID控制器,利用MATLAB的Simulink模塊進行仿真分析,得到送桿過程的同步特性,驗證控制方案的合理性。
1 送桿機構工作原理
送桿機構如圖1所示。
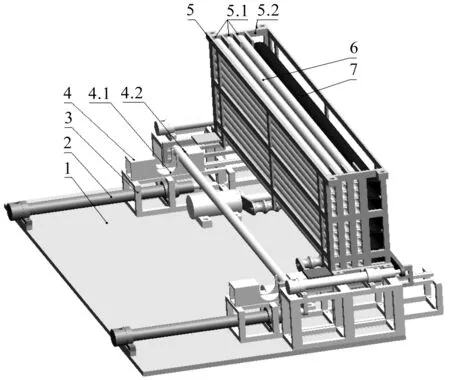
圖1 送桿機構圖1—機架;2—運送油缸;3—支架安裝架;4—運送支架;4.1—套管卡槽;4.2—鉆桿卡槽;5—儲桿箱;5.1—鉆桿容納腔;5.2—套管容納腔;6—鉆桿;7—套管
圖1中,送桿機構的運送油缸推動運送支架進行鉆桿或套管的選取或歸位輸送時,需要保障運送支架的鉆桿卡槽或套管卡槽精確地對準儲桿箱的鉆桿容納腔或套管容納腔,進而才能精確地選取所需鉆桿或套管。
由于送桿機構采用兩邊對稱安裝的運送油缸分別驅動兩邊的運送支架,而運送油缸的進油流量、油缸泄露、負載力耦合等因素會導致其活塞桿伸出行程難以同步,兩邊運送支架的卡槽中心線與儲桿箱中桿件的中心線存在偏角,導致桿件不能精確落到卡槽內(nèi),使送桿機構不能正常工作。
2 送桿過程閉環(huán)同步控制系統(tǒng)建模
送桿機構的送桿過程模型如圖2所示。
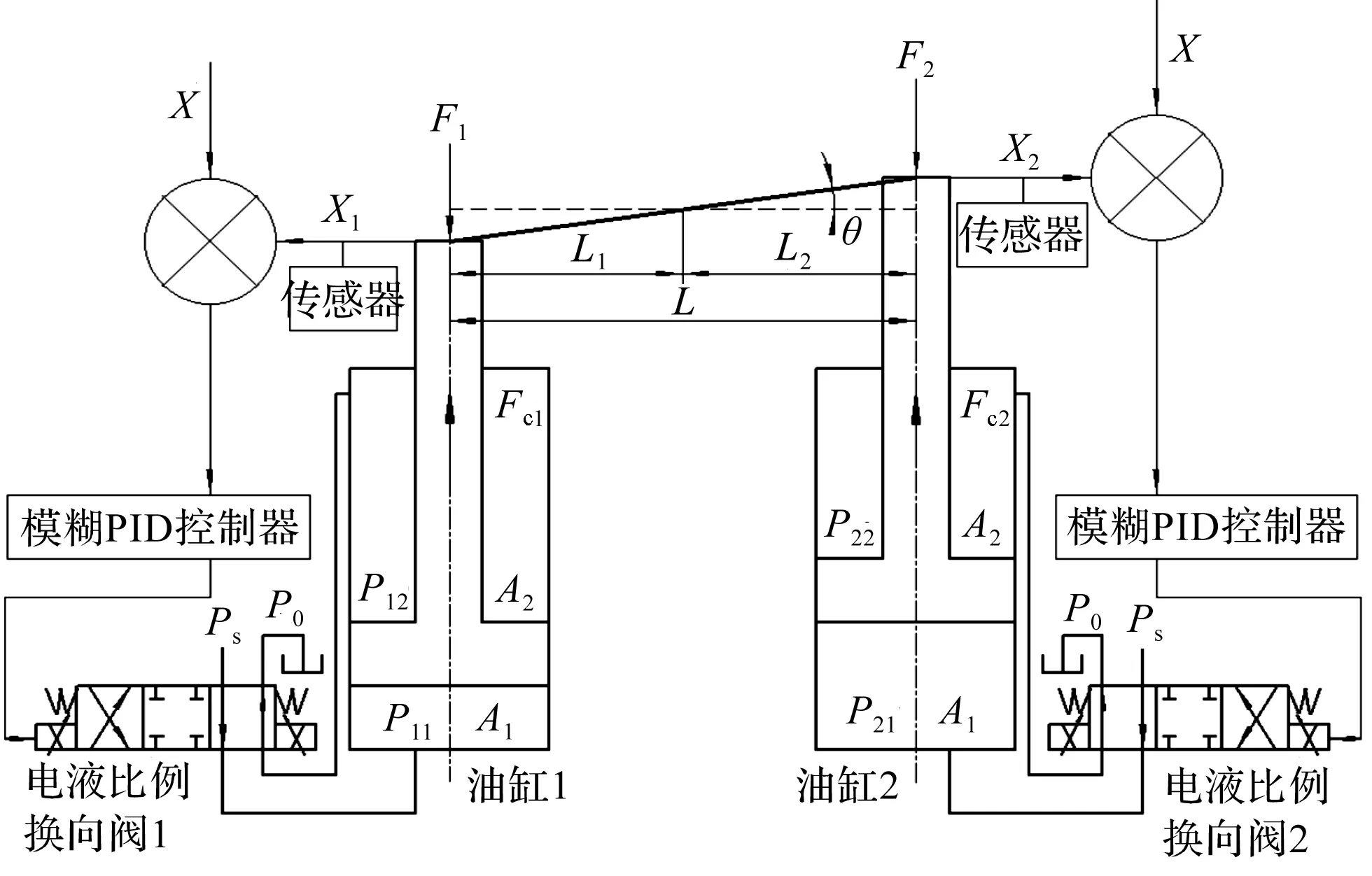
圖2 送桿機構的送桿過程模型圖
圖2中,控制信號為運送油缸活塞桿伸出的理論位移或速度,油缸可通過位移傳感器實時檢測并反饋實際位移,然后將理論位移與實際位移的誤差和誤差變化率,作為模糊PID控制器的輸入信號,再通過模糊PID控制器輸出控制電壓信號,調(diào)節(jié)電液比例換向閥的閥芯開度大小,進而調(diào)節(jié)運送油缸的流量與壓力,達到對送桿過程實現(xiàn)閉環(huán)同步控制的目的。
2.1 兩缸輸送桿件的同步控制動力學模型
(1)兩缸實際位移與桿件偏轉方程為:
(1)
式中:θ—桿件的偏轉角度;X1—油缸1實際位移;X2—油缸2實際位移;L—兩缸中心距。
(2)運送支架與桿件的平面運動方程為:
(2)
(3)
(4)
式中:FC1,F(xiàn)C2—油缸1和油缸2的輸出力;F1,F(xiàn)2—兩邊運送支架受到的摩擦阻力;M1—桿件質(zhì)量;M2—運送支架質(zhì)量;J1—桿件轉動慣量;Y—桿件質(zhì)心實際位移;L1,L2—桿件質(zhì)心到油缸1或油缸2的中心距。
由式(1~4)可得:
(5)
(6)
2.2 電液比例換向閥數(shù)學模型
(1)比例電磁鐵輸出力方程為:
FD=KuU
(7)
式中:Ku—比例電磁鐵電壓力增益;U—比例電磁鐵輸入電壓;FD—電磁鐵輸出力。
(2)比例電磁鐵力平衡方程[9]為:
(8)
式中:mD—閥芯等效質(zhì)量;cD—閥芯綜合阻尼系數(shù);kD—閥芯彈簧剛度;XV—電磁鐵閥芯位移。
由式(7~8)可得,電磁鐵閥芯位移方程為:
(9)

2.3 對稱閥控制非對稱缸數(shù)學模型
筆者以電液比例換向閥1控制油缸1為例來進行建模[10]。
2.3.1 閥1負載壓力與負載流量的定義
穩(wěn)態(tài)下油缸1力平衡方程為:
P11A1-P12A2=FC1
(10)
穩(wěn)態(tài)下油缸1流量方程為:
(11)
穩(wěn)態(tài)下油缸1輸出功率方程為:
P11Q1-P12Q2=W
(12)
式中:P11,P12—油缸1無桿腔壓力和有桿腔壓力;A1,A2—油缸1無桿腔面積和有桿腔面積;Q1—流入或流出油缸1無桿腔流量;Q2—流出或流入油缸1有桿腔流量;W—液壓缸輸出功率。
由式(10~12)可得:
閥1負載壓力為:
(13)
閥1負載流量為:
(14)
2.3.2 電液比例換向閥1的閥口流量方程
(1)正向XV1≥0時:
(15)
(16)
式中:Cd—閥的流量系數(shù);ω—閥口面積梯度;XV1—換向閥1的閥芯位移;ρ—液壓油密度;PS—系統(tǒng)壓力;P0—回油壓力。
由式(11,15,16)可得:
(17)
由式(13,17)可得:
(18)
(19)
由式(14,15,18)可得正向負載流量:
(20)
(2)反向XV1<0時:
(21)
(22)
同理,可得反向負載流量:
(23)
(3)閥1的壓力流量特性方程為[11]:
由式(20,23)可得:
QL=KqXV1-KcPL
(24)
(25)
(26)
式中:Kq—流量增益系數(shù);Kc—流量壓力系數(shù)。
2.3.3 油缸1的流量連續(xù)性方程
(1)無桿腔流量:
(27)
(2)有桿腔流量:
(28)
式中:Cip—油缸內(nèi)泄露系數(shù);Cep—油缸外泄露系數(shù);V1—油缸無桿腔容積;V2—油缸有桿腔容積;βe—油液體積彈性模量。
由式(27~28)可得負載流量[12]:
(29)
代入上式正反向P11、P12可得:
(30)
(31)
(32)
(33)
式中:Cap—附加泄露系數(shù);Cbp—等效泄露系數(shù);Ve—等效容積。
2.3.4 油缸1的力平衡方程
力平衡方程為:
(34)
式中:M—折算到活塞桿上的總質(zhì)量;Bp—負載粘性阻尼系數(shù);Kf—負載彈簧等效剛度。
由于送桿機構采用相同型號的力士樂電液比例換向閥驅動同種型號的油缸,可根據(jù)式(5,6,9,24,30,34)分別建立送桿過程的兩缸閉環(huán)同步控制系統(tǒng)模型。
送桿過程兩缸閉環(huán)同步控制系統(tǒng)模型如圖3所示。
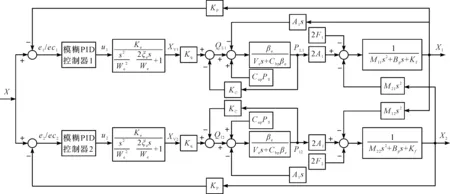
圖3 送桿過程兩缸閉環(huán)同步控制系統(tǒng)模型圖
反饋系統(tǒng)采用磁致伸縮位移傳感器,可直接檢測并反饋油缸實際位移的絕對值,其中:KP—傳感器反饋系數(shù)。
根據(jù)圖3有:
(35)
3 模糊PID控制器設計與仿真分析
3.1 模糊PID控制器設計
由于控制系統(tǒng)具有強耦合和模型參數(shù)不確定性的特點,采用模糊PID控制能夠提高控制精度和抗干擾能力。
筆者利用Simulink建立模糊PID控制器,以油缸的理論位移與實際位移的誤差量e和誤差變化率ec為輸入,通過模糊控制器輸出參數(shù)Δkp、Δki、Δkd,整定PID控制中的KP、KI、KD參數(shù),從而使得模糊PID控制器能夠精確地調(diào)節(jié)閥芯的開度大小。
設定系統(tǒng)誤差量e和誤差變化率ec的基本論域為[-1,1],模糊輸出量Δkp、Δki、Δkd的基本論域為[-6,6];系統(tǒng)誤差量e、誤差變化率ec和模糊輸出量Δkp、Δki、Δkd離散論域均為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};各變量的模糊子集設為{NB、NM、NS、ZO、PS、PM、PB},分別對應{負大、負中、負小、零、正小、正中、正大}。
在MATLAB的fuzzy工具箱中,編輯輸入量和輸出量均采用三角形隸屬度函數(shù);解模糊選取重心法。
模糊控制器參數(shù)的在線整定過程,就是找到輸入量e、ec和輸出量Δkp、Δki、Δkd之間的模糊關系。
根據(jù)工程實踐經(jīng)驗,可得到如下的模糊控制規(guī)則[13-14]:
(1)當|e|較大時,為提高系統(tǒng)響應速度,取較大的Δkp,取較小的Δki、Δkd,防止系統(tǒng)過度超調(diào);
(2)當|e|適中時,為減小系統(tǒng)超調(diào)量,取較小的Δkp,取適當?shù)摩i、Δkd,保障系統(tǒng)的響應速度;
(3)當|e|較小時,為使系統(tǒng)穩(wěn)定,取較大的Δkp、Δki,取適當?shù)摩d,減小系統(tǒng)靜差;
(4)當|ec|較大時,Δkd取值應越小,當|ec|較小時,Δkd取值應越大,避免系統(tǒng)振蕩。
Δkp的模糊規(guī)則如表1所示。
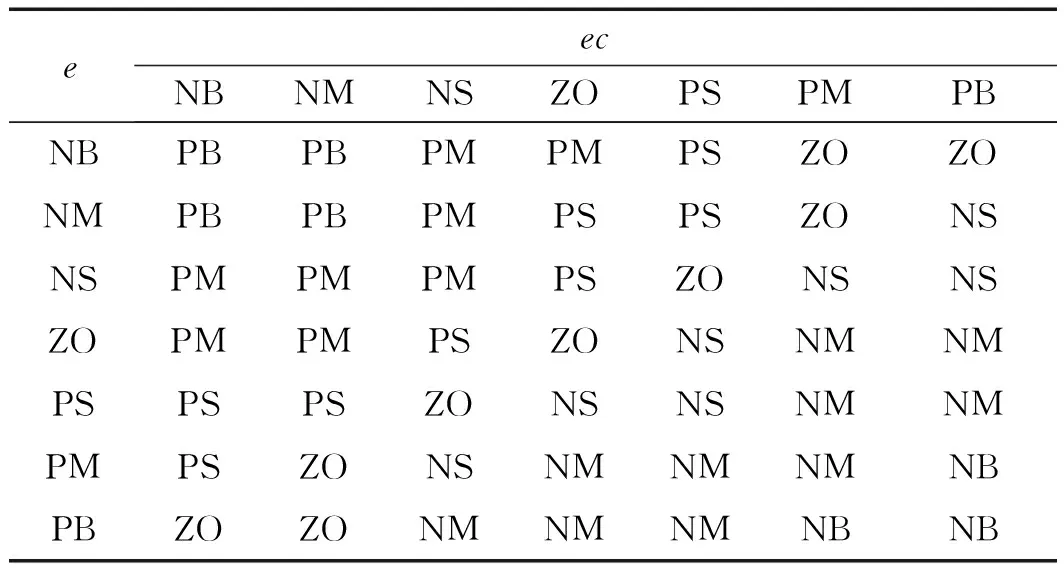
表1 Δkp的模糊規(guī)則表
Δki的模糊規(guī)則如表2所示。
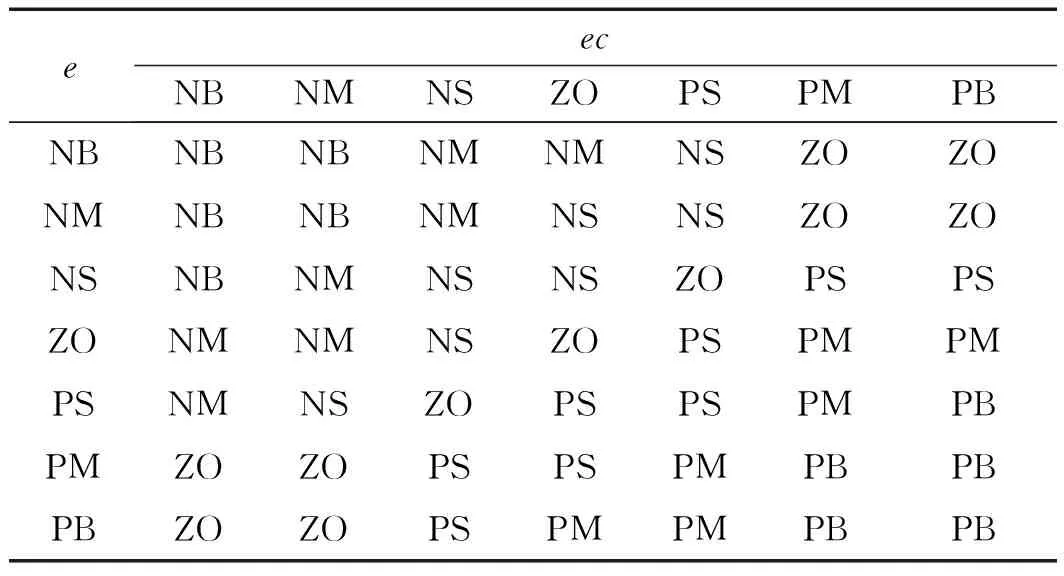
表2 Δki的模糊規(guī)則表
Δkd的模糊規(guī)則如表3所示。
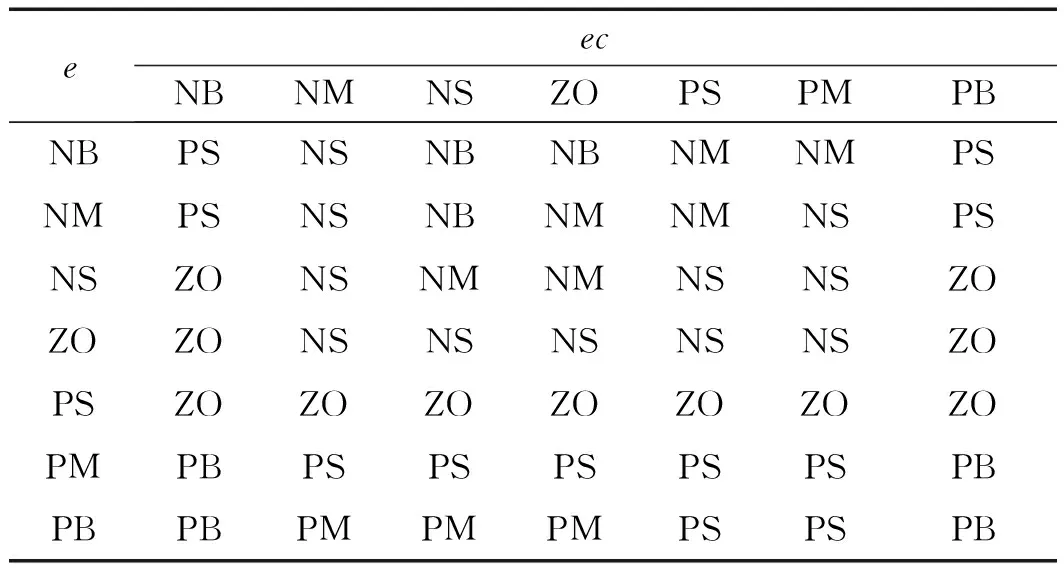
表3 Δkd的模糊規(guī)則表
根據(jù)以上模糊規(guī)則,筆者在模糊推理系統(tǒng)中,通過模糊語言(If e is ... and ec is ..., Then Δkpis ... and Δkiis ... and Δkdis ...)進行模糊規(guī)則編輯,共有49條模糊語言。
3.2 仿真分析
根據(jù)前文送桿過程兩缸閉環(huán)同步控制系統(tǒng)模型,筆者利用Simulink進行仿真分析。
控制系統(tǒng)主要仿真參數(shù)如表4所示。
在輸送桿件過程中,送桿機構需要實現(xiàn)兩缸多點位精度同步控制,且最小定位位移是65 mm,最大定位位移是670 mm。為避免油缸在啟動和停止時速度突變,造成液壓沖擊,筆者在仿真中采用速度控制信號。
油缸速度控制信號如圖4所示。
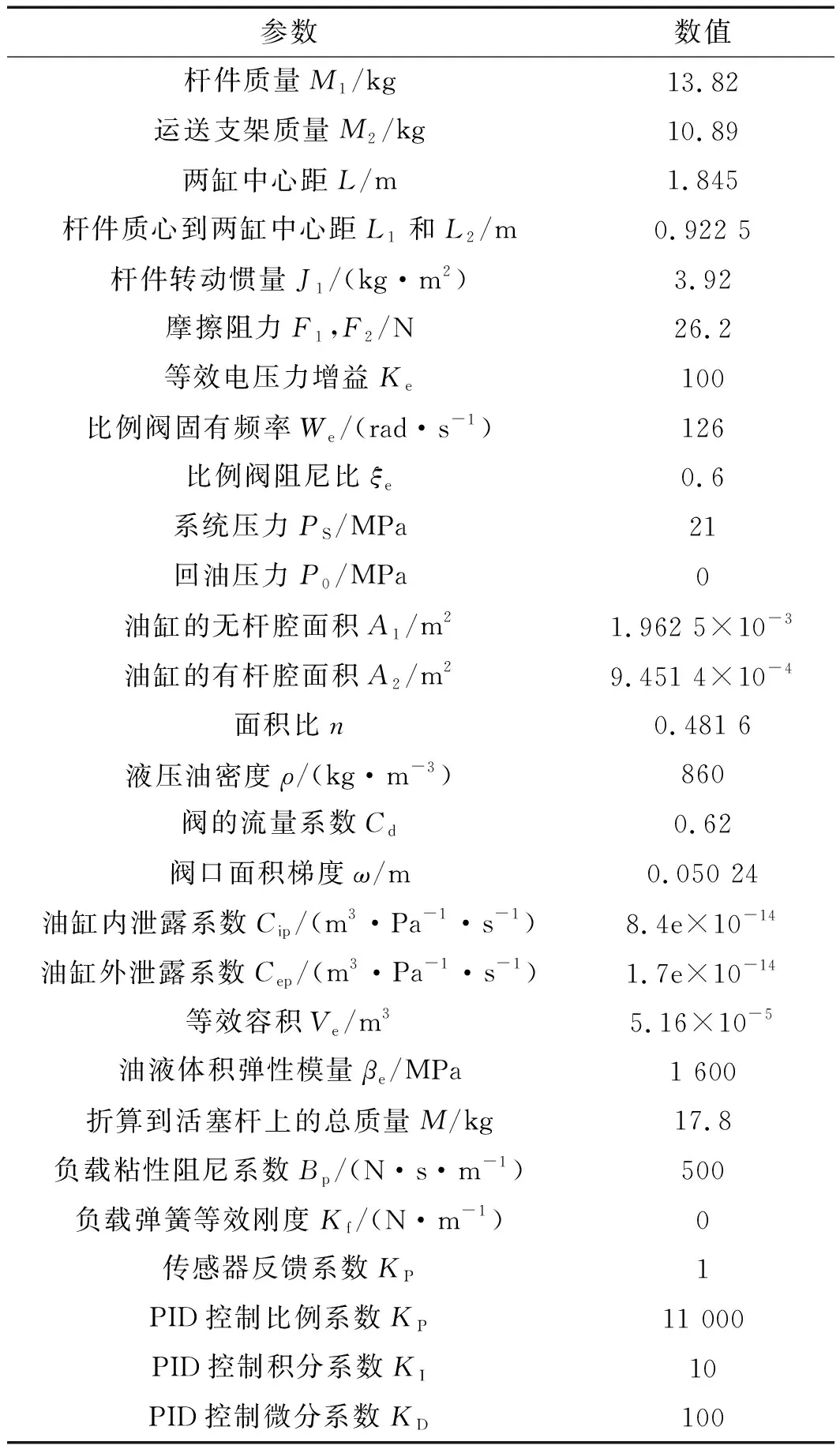
表4 控制系統(tǒng)主要仿真參數(shù)表
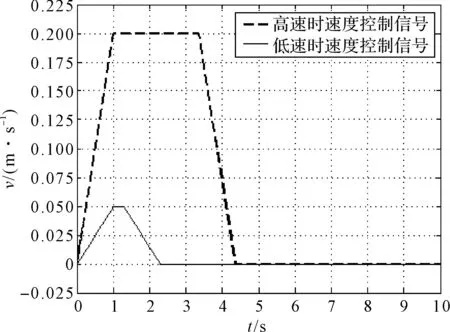
圖4 油缸速度控制信號圖
圖4中,速度信號為先勻加速,再勻速,最后勻減速的過程;且低速為0.05 m/s,高速為0.2 m/s。在此基礎上,從而可以對不同速度控制下的兩缸同步誤差進行對比分析。
低速時兩缸同步誤差如圖5所示。
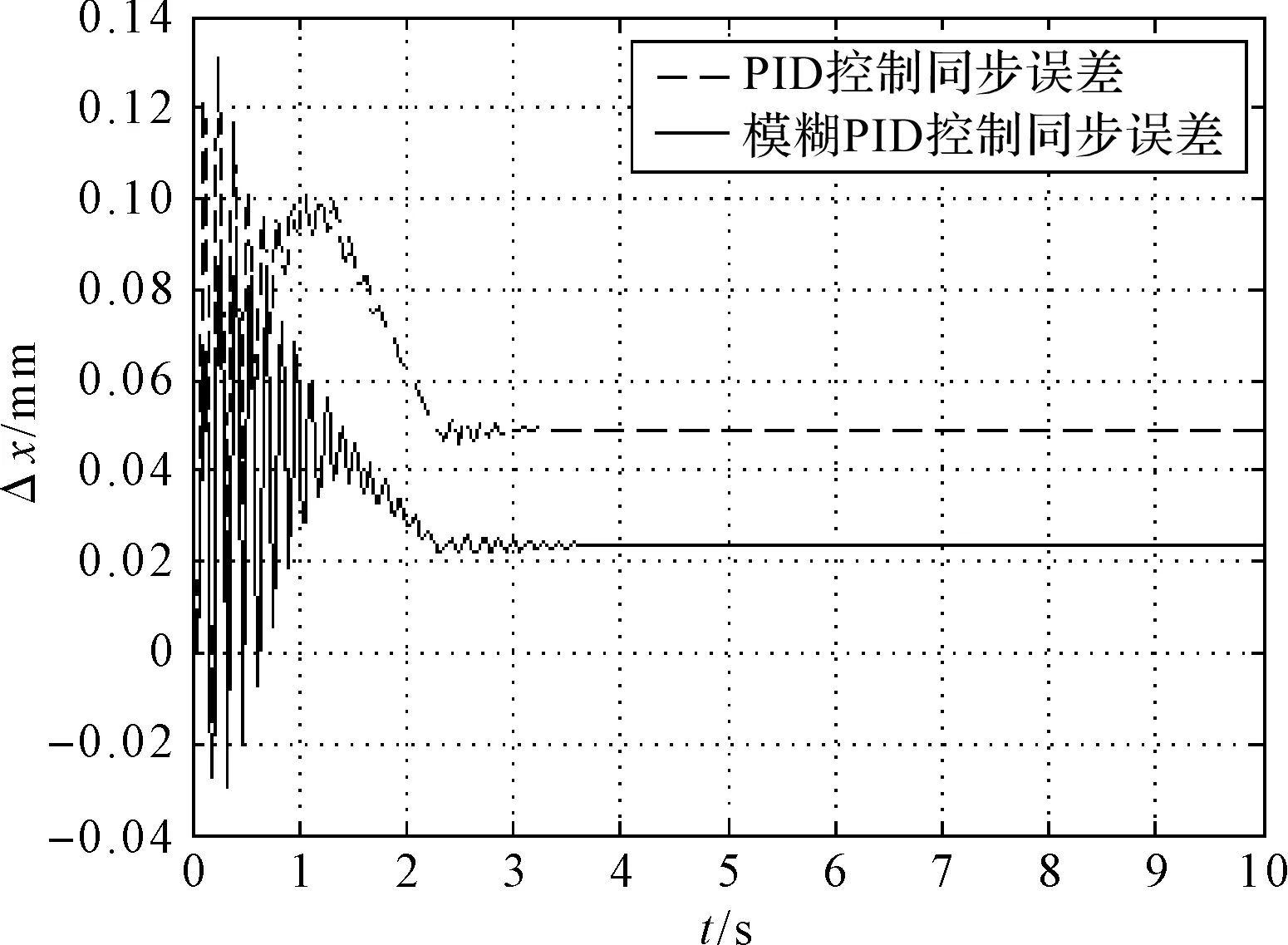
圖5 低速時兩缸同步誤差圖
圖5中,油缸以0.05 m/s低速實現(xiàn)最小位移65 mm精確定位時,對比傳統(tǒng)PID控制器和模糊PID控制器的控制效果可見,油缸的速度和位移能夠較好地跟蹤控制信號;其中,采用傳統(tǒng)PID時,兩缸的最大同步誤差有0.13 mm,穩(wěn)定時的最終誤差有0.05 mm;而采用模糊PID時,兩缸的最大同步誤差只有0.09 mm,穩(wěn)定時的最終誤差只有0.02 mm。
高速時兩缸同步誤差如圖6所示。
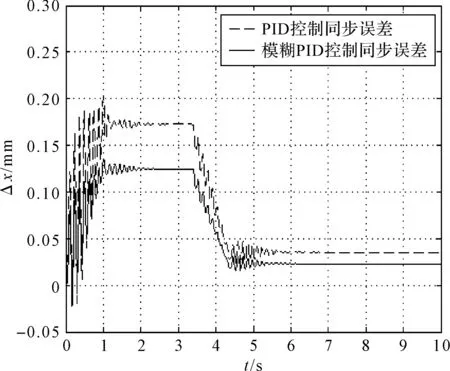
圖6 高速時兩缸同步誤差圖
圖6中,油缸以0.2 m/s高速實現(xiàn)最大位移670 mm精確定位時,采用傳統(tǒng)PID時,兩缸的最大同步誤差有0.20 mm,穩(wěn)定時的最終誤差有0.04 mm;而采用模糊PID時,兩缸的最大同步誤差只有0.13 mm,穩(wěn)定時的最終誤差只有0.03 mm。
從圖(5,6)可得:在油缸勻加速啟動時,采用同等控制方式時,在加速度的影響下,控制系統(tǒng)的同步誤差逐漸增大;但在油缸勻減速停止時,系統(tǒng)會加快對同步誤差的調(diào)節(jié)作用。
綜上所述,與傳統(tǒng)PID控制相比較,模糊PID控制能夠較大地提高系統(tǒng)的控制精度。
4 結束語
(1)以某課題組所設計的鉆機用送桿機構為例,筆者分析了送桿機構因同步誤差不能正常工作的原因,并通過同等方式建立了送桿機構的送桿過程數(shù)學模型和兩缸閉環(huán)同步控制系統(tǒng)模型;
(2)設計了模糊PID控制器,利用MATLAB的Simulink模塊進行了仿真分析,并與傳統(tǒng)PID控制進行了控制效果的對比。對比結果表明:模糊PID控制系統(tǒng)工作穩(wěn)定、響應速度快、同步精度高,油缸能夠較好跟蹤控制速度和位移信號,低速時最大同步誤差只有0.09 mm,高速時最大同步誤差只有0.13 mm,滿足送桿機構的同步控制需求;
(3)采用的模糊PID同步控制方法,不僅適用于兩缸同步系統(tǒng),而且適用于工程上的多缸同步系統(tǒng),其控制系統(tǒng)的控制算法簡單、搭建成本低,具有一定的借鑒價值。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
