
基于多傳感器集成的機器人整機自動控制方法研究
2020-09-23 08:06:20李麗
現代電子技術 2020年18期
關鍵詞:多傳感器
李麗


摘? 要: 受到不同傳感器信號融合度與傳感器分布位置的影響,機器人整機在自動控制過程中存在多傳感器信號響應反饋不同步的現象。通過對機器人結構運動力學模型的建立與分析,完成對不同位置傳感器所應發送力值信號大小的獲取;根據獲取的數值對傳感器分布位置與規格進行修正,在硬件結構上減小控制誤差量;通過引入信號同步算法,統一機器人整機不同分布位置上傳感器信號到達控制器的時間,實現在控制程序上的誤差修正。通過對不同差量下不同感應器指令響應誤差數據的收集、對比、分析,證明提出的控制方法能夠有效提升自動控制信號的同步效果。
關鍵詞: 機器人; 自動控制; 多傳感器; 結構動力學; 信號同步; 傳感器分布
中圖分類號: TN876?34; TP212.9? ? ? ? ? ? ? ? ?文獻標識碼: A? ? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2020)18?0175?03
Abstract: Due to the influence of the fusion degree of the different sensor signals and the distribution location of the sensor, the whole robot has the phenomenon that the response feedback of multi?sensor signal is not synchronous in the automatic control process. The structural dynamics model of the robot is established and analyzed to complete the acquirement of the signal size of the stress value transmitted by different position sensors. The distribution location and the specification of the sensors are corrected according to the obtained value, and the control error amount on the hardware structure is reduced. The time of the sensor signal reaching the controller at different distribution positions of the whole robot is unified by introducing the signal synchronization algorithm, and the error correction on the control program is realized. It is proved that the proposed control method can effectively improve the synchronization effect of automatic control signal by collecting, comparing and analyzing the error data of different sensors′ command response under different differences.
Keywords: robot; automatic control; multi?sensor; structural dynamics; signal synchronization; sensor distribution
0? 引? 言
隨著物聯網技術[1]、大數據技術[2]、云計算技術[3]、傳感控制技術[4]的高速發展,為機器人研發提供了諸多有利的技術支持。我國對高尖端機器人(人形機器人)研發力度不斷增大。機器人可實現仿人工生物運動力學的動作,需要多個傳感器共同對不同的參數數據進行實時的采集與下達。其中,需要傳感器的種類包括:通信傳感器、重力傳感器、紅外傳感器、距離傳感器、壓力傳感器、語音傳感器與圖像傳感器等。
由于傳感器類型的不同,導致傳感器收發信號的頻率、波形、速率等參量各不相同,信號間的融合程度直接關系著信號的同步程度,信號的同步程度是衡量機器人完善與否的重要標準。由于機器人整機傳感器所分布位置的不同和所受力值的不同,對同步控制有所影響,本文從運動力學與信號控制兩個角度對同步控制方法進行詳細描述。
1? 機器人整機運動力學模型建立與分析
1.1? 運動力學模型建立
由于機器人整體控制是通過分布在機器人整機各個關節(控制點)上的傳感器感應運動力值,將其轉換為控制信號,從而控制關節帶動器件,完成機器人運功。本文首先對立機器人的運動力學模型進行建立,通過模型反映控制點(多傳感器分布位置)所受力值大小,轉化得到不同位置分布下的傳感器信號轉換響應時間。具體的運動動力模型采用Euler?Lagrange方程[5]來完成,其動力Euler?Lagrange方程為:
式中:[w=w1,w2,…,wiY],代表機器人運動空間中i維動態軸坐標位置;A代表Lagrange方程,表現動量與動勢間的能量轉化關系;[Rw]代表[i×z]維載入量的動態序列;[μ]代表Lagrange系數因子[6];[Sw]代表制約控制序列;積值[SYwμ]代表限制量的常態值。由Euler?Lagrange方程可得到,機器人多傳感器分布點的動力學模型為:
對式(2)進行微分計算,剔除控制運動中的干擾量,得到純凈的動力學模型方程式:
式中:[Dw]代表控制運動的阻力系數;[Dw]代表傳感器受力系數;[oy]代表動能轉換信號量的權值系數;[oy]代表信號轉換行為中的誤差權值系數。
將乘量[DYw]代入式(3)方程兩側,并將轉換能耗系數設置為[DYSYμ=0],消除Lagrange乘子[μ]簡化算式 ,得到最終機器人運動力學模型為:
式中:D代表[n+1]控制點下不同傳感器所受力值總量;Z代表力值感應轉換比值;B代表動力輸出總量;R代表傳感器感應識別系數。
1.2? 運動力學模型分析
完成上述的模型建立后,需要對模型所反應的數據進行分析,通過分析計算獲得不同分布位置的傳感器對應的力值關系。通過模型可知,機器人運動中,多傳感器所處位置有多個自由度,不同位置的傳感器對應一個自由度量值。因此,需要將模型中所反應的總力值分解對應到每個傳感器上,具體的計算步驟如下:
機器人運動動力模型簡化后的表達式為:
式中:[Zw]代表i×z維習慣性常量矩陣;[w]代表傳感器分布位置對力值轉換系數;[Bw,w]代表傳感器控制轉換常量;[Hw]代表傳感器感應矢量;[Gw]代表傳感器空間位置矢量;[μf]代表有限的可控干擾系數;[μ]代表轉換能力值。考慮到機器人傳感器在工作狀態下易受到運動產生干擾值[7]的影響,再分解計算中引入等量空間抑制方程,得到分解后單個傳感器的動力學公式為:
式中:[c=w·wY];[1i×i]與[0i×i]代表i×i坐標域下的傳感器獨立矩陣與靜態矩陣;[Zc]代表機器人控制點傳感器矢量;[ωc]代表[i-1]階下的空間作用力;[Hc]代表i×1坐標域下傳感器所受力值半徑;[Gc]代表傳感器轉換誤差量。受到機器人運動過程中,矢量力值的不易計算的影響,將式(6)進行矢量剔除轉化,得到簡化的力學公式為:
式中:[gc]代表[gc]的預判量;o代表一個感應器的力值感應轉換動量。
1.3? 多傳感器分布與力學控制的關系
完成對運動力學模型的分解計算后,多傳感器集成的機器人中每個獨立區域的傳感器所受力值數據可通過公式計算獲得[8]。但需要準確完成對傳感器同步誤差量的修正,還需要將所獲得的數值參量對應綁定到每個傳感器上,機器人整機結構分布位置可根據功能區域的不同分為:右臂功能傳感器運動力學區、左臂功能傳感器運動力學區、頭身軀干功能傳感器運動力學區、右腿功能傳感器運動力學區、左腿功能傳感器運動力學區。通過對力學模型的分析發現,傳感器的受力方向隸屬于一個三維坐標空間[9?10],將傳感器的受力系數按照三維坐標的受力方向進行綁定,在三維受力的維度上系數為定值,從而快速找出存在誤差量的傳感器,對其修正。
2? 多傳感器機器人整機控制方法實現
2.1? 傳感器分布位置與規格誤差量的修正
完成對多傳感器集成的機器人整機傳感器力學關系綁定后,每個傳感器受力系數已為定值,在維度關系不發生改變的前提下可不考慮定值系數對控制信號的影響,可單純將機器人整機控制響應同步問題歸結到傳感器分布與傳感器自身參數不足上。
2.1.1? 傳感器分布導致的同步問題修正
通過對機器人運動過程中的力學模型分析與傳感器分布位置的研究發現,左臂肘關節、右臂肘關節、左腿膝關節、右腿膝關節4個位置的傳感器,在機器人運動過程中,所受到的力值均大于其他分布位置的傳感器,受到阻力與應力的共同作用,傳感器供電會發生阻值的變動,變動阻值提升擾動信號強度,導致傳感器信號響應的瞬態遲滯,出現同步異常。根據上文傳感器劃分區域,將左臂肘關節、右臂肘關節、左腿膝關節、右腿膝關節4個位置的傳感器信號發送時間的控制參量進行對應的調整,通過對信號的發送與反饋時間參量的校對,達到信號同步的效果。
2.1.2? 傳感器自身規格不足導致的同步誤差修正
在一些特殊的情況下,會出現不論怎樣修改、校正傳感器間的同步時間數據,機器人仍會不定時出現同步異常的問題。此狀態下,就可以考慮傳感器的控制接收硬件的規格參數是否達到校對參量數值的標準。對硬件規格參量不足導致的同步問題,最直接有效的方法就是硬件的替換修正。
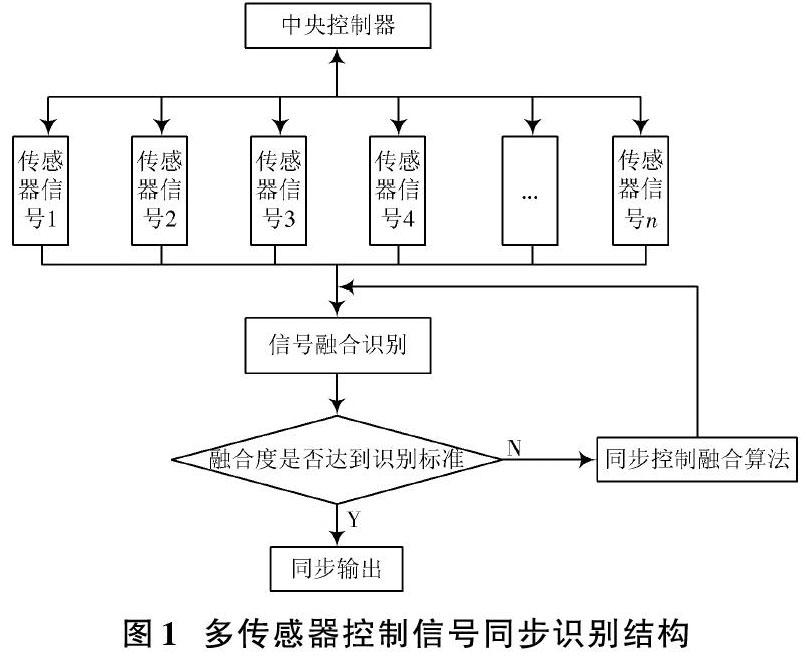
2.2? 多傳感器控制信號同步識別計算
完成傳感器的軟硬件參數的修正后,需要對機器人整機的控制算法進行修正。解決多傳感器信號間的識別融合,是提升多傳感器集成的機器人控制信號同步的關鍵。多傳感器控制信號同步識別結構如圖1所示。
3? 實驗數據分析
將多傳感器集成的機器人的主控數據中,各傳感器信號頻率數據導入仿真測試程序,對應生成信號波,如圖2所示。由檢測結果可知,采用所提的基于多傳感器集成的機器人整機自動控制方法,能夠有效地解決多傳感器信號間的同步異常問題。
4? 結? 語
傳感器識別控制技術與無線通信技術為機器人研究與開發提供了技術支持。機器人的活動需要諸多傳感器作為信息數據的收集與交互介質。本文根據同步異常問題發生的原因,從力學與信號控制兩方面,對問題解決方法進行了詳細的描述,并通過實驗對方法同步效果進行了驗證。本文方法的提出與驗證,為機器人開發研究及傳感器控制研究提供了一種新的控制方案。
參考文獻
[1] 伍明,張國良,李琳琳,等.基于動態和靜態環境對象觀測一致性約束的移動機器人多傳感器標定優化方法[J].兵工學報,2017,38(8):1630?1641.
[2] 盧晨,劉正.無跡信息濾波耦合交互式多模型的多傳感器機器人軌跡控制[J].中國工程機械學報,2018,16(6):544?549.
[3] 陳冠宇,成群林,張解語,等.基于多傳感器測量的航天器艙段自動對接位姿調整方法[J].北京航空航天大學學報,2019,45(6):1232?1239.
[4] 孫寧,秦洪懋,張利,等.基于多傳感器信息融合的車輛目標識別方法[J].汽車工程,2017,39(11):1310?1315.
[5] 李兵,蘭夢輝,孫彬,等.基于多傳感器測量的孔組位置度快速檢測方法[J].計算機集成制造系統,2018,24(5):1089?1097.
[6] 周衛琪,齊翔.基于多傳感器信息融合的汽車行駛狀態估計[J].汽車工程,2019,41(1):7?13.
[7] 王正家,夏正喬,孫楚杰,等.基于多傳感器信息融合的自主跟隨定位及避障方法[J].傳感技術學報,2019,32(5):723?727.
[8] 王立玲,梁亮,馬東,等.基于多傳感器信息融合的雙足機器人自主定位[J].中國慣性技術學報,2018,26(5):629?634.
[9] 劉澈,姜勇,姚森敬,等.基于多傳感器信息融合的絕緣子串自動識別方法[J].機械設計與制造,2019(4):220?224.
[10] 程翀,郭曉彬,陳祥磊,等.基于Mindstorms的智能機器人控制系統開發[J].武漢理工大學學報(交通科學與工程版),2018,42(2):247?252.
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
