自動駕駛汽車事故的刑事歸責與教義展開
2020-09-26 07:43:22付玉明
法學 2020年9期
關鍵詞:系統
付玉明
一、問題的提出:人工智能時代的技術風險
當前,人工智能時代的科技革命已經從理論實驗轉向技術應用。小到掃地機器人、服務機器人等家居智能產品,大到醫療機器人、自動駕駛汽車等高精尖產品,科技在不斷地為我們提供生活便利的同時,全新的技術風險也隨之而來。
以自動駕駛汽車為例,自動駕駛技術在道路交通領域的運用,雖會大幅度減少交通事故,但是絕不能將事故率降為零。尤其在技術開發試驗階段,更能突顯出其技術缺陷與法律應對不足的問題。2015 年7 月,谷歌公司在美國加利福尼亞州芒廷維尤市進行自動駕駛車測試時發生追尾事故,事故中有三人受輕傷。2016 年5 月,全球首例自動駕駛致死事故在美國佛羅里達州發生,一輛開啟了自動駕駛模式的汽車與一輛正在轉彎的卡車相撞,導致車主不幸身亡。事發時,司機駕駛一輛2015 款特斯拉Model S 在佛羅里達州高速公路上與一輛垂直方向開來的掛車相撞。調查報告稱,在強烈的日照條件下,駕駛員和自動駕駛系統都未能注意到拖掛車的白色車身,因此未能及時啟動剎車系統。由于拖掛車正在橫穿公路,且車身較高,這一特殊情況導致Model S 從掛車底部通過時,其前擋風玻璃與掛車底部發生撞擊,駕駛員不幸遇難。此后,2018 年3 月18 日晚,美國亞利桑那州一名女子被Uber 自動駕駛汽車撞傷,之后不幸身亡;時隔不久,3 月23 日美國加利福尼亞州一輛處于自動駕駛模式下的特斯拉Model X 汽車發生車禍,車主不幸身亡。國內近年同樣有類似事故發生,2016 年1 月,京港澳高速河北邯鄲段發生一起追尾事故,一輛特斯拉轎車直接撞上一輛正在作業的道路清掃車,特斯拉轎車當場損毀,司機不幸身亡。調查結果顯示,事發時特斯拉開啟了無人駕駛功能,但沒有剎車和減速的跡象,也沒有采取任何躲避措施。〔1〕參見《Uber“殺人”的真相呈現之前,我們來回顧一下全球12 起自動駕駛悲劇》,https://www.d1ev.com/news/qiye/65251, 2020 年7 月1 日訪問。
盡管自動駕駛技術在前進的道路上充滿了無數未知的風險,這依然不能阻擋科學探索的腳步。2016 年12 月19 日,中國首列無人駕駛地鐵在香港南港島線正式開通運行。2017 年11 月16 日,百度宣布將于2018 年7 月底與金龍汽車率先實現L4 級無人駕駛汽車的小規模量產。2017 年12 月2 日,深圳市首批智能公交車試運營。2017 年12 月30 日,中國大陸首條無人駕駛運行線路——北京軌道交通燕房線正式開通運營。2018 年1 月初,北京市順義區無人駕駛試運營基地在奧林匹克水上公園啟動。2018 年2 月,浙江宣布將建設首條超級高速公路,全面支持自動駕駛。2018 年3 月,全國首批3 張智能網聯汽車開放道路測試號牌在上海發放。〔2〕參見彭文華:《自動駕駛車輛犯罪的注意義務》,載《政治與法律》2018 年第5 期,第86-87 頁。
除了科研人員在技術層面上的努力,社會治理制度也應當為化解技術風險矛盾提供支持。2017年12 月,北京市交通委聯合北京市公安交管局、北京市經濟信息委等部門,制定發布了《北京市關于加快推進自動駕駛車輛道路測試有關工作的指導意見(試行)》和《北京市自動駕駛車輛道路測試管理實施細則(試行)》兩個文件,規范推動自動駕駛汽車的實際道路測試。2018 年2 月,上海經信委、公安局、交通委印發了《上海市智能網聯汽車道路測試管理辦法(試行)》,文中明確了智能網聯汽車道路測試申請條件、測試申請及審核、測試管理、事故處理、違規操作責任等方面的要求。其后,2018 年4 月,工業和信息化部、公安部、交通運輸部印發了《智能網聯汽車道路測試管理規范(試行)》。此后,全國又有多地如杭州、長沙、濟南等針對國務院部委的規定出臺了相關實施細則。
綜上可以看出,無人駕駛技術必定將改變日后的交通出行方式。基于無人駕駛技術的人工智能特性,其與普通自然人駕駛汽車的操作原理大有不同,因此如何在刑事領域作出化解技術紅利與技術風險矛盾的妥當抉擇,正確處理無人駕駛引發的事故案例,就成為當前必須回應的問題。
二、自動駕駛技術的程序原理與級別設定
理論上可以將機器人技術的發展歷程大致分為三個階段:普通機器人時代、弱人工智能時代和強人工智能時代。與普通機器人相比,智能機器人已經具有了深度學習的能力;而與弱智能機器人相比,強智能機器人又具有在自主意識和意志的支配下獨立作出決策并實施行為的能力,即獨立辨認能力與控制能力。〔3〕參見劉憲權:《人工智能時代的刑事責任演變:昨天、今天、明天》,載《法學》2019 年第1 期,第80 頁。當前,我們正處于弱人工智能快速發展并向強人工智能邁進的時代。自動駕駛技術領域的發展現狀就能夠充分體現這一時代特點。〔4〕參見董玉庭:《人工智能與刑法發展關系論——基于真實與想象所做的分析》,載《現代法學》2019 年第5 期,第127-128 頁。
自動駕駛的實現主要依賴于自動駕駛系統(技術)的應用。自動駕駛系統是機動車自主執行部分或全部駕駛操作的運行系統,使得機動車能夠在駕駛人不完全參與駕駛的情況下,達到安全行駛狀態。由此可以看出,自動駕駛的現實狀況依然是一定程度上的人與智能的結合,尚未達到完全脫離人的操作的技術階段,而是呈現出自動化程度越來越高、人的操作需要越來越少的趨勢。在此種自動駕駛技術階段下,發生事故時如何進行歸責就需要與傳統的普通駕駛相區別。因此,歸責原則與責任分配的明確在自動駕駛領域顯得尤為重要。〔5〕參見王軍明:《自動駕駛汽車的刑事法律適用》,載《吉林大學社會科學學報》2019 年第4 期,第81-82 頁。而要想明確歸責原則及責任分配,必須首先明確當前自動駕駛技術的內在原理。
基于人類對機動車駕駛操作的參與度,即根據自動駕駛系統與駕駛人對駕駛任務、周圍駕駛環境的監控任務及緊急狀態下的駕駛接管任務的分配,對自動駕駛系統進行級別區分。在此領域,作為汽車工業強國的日本已經展開前期的研究,對自動駕駛的技術原理和級別設定做了詳細界分,并已經取得備受矚目的成果。例如,日本官方對于自動駕駛級別的定義呈現出從四級到六級細化的趨勢。內閣府2016 年《戰略創新創造項目(SIP)自動駕駛系統的研發計劃》(「戦略的イノベーション創造プログラム(SIP)自動走行システム研究開発計畫」)及內閣秘書處IT 綜合戰略辦公室2017 年《公私智能道路交通系統(ITS)構想路線圖的定義》(「官民 ITS 構想·ロードマップ~2017 多様な高度自動運転システムの社會実裝に向けて~」)中,采取了自動系統的四級劃分(表1),級別1 為機動車執行加速、轉向與制動其中一項的狀態;級別2 為機動車能夠同時執行加速、轉向與制動多個操作的狀態;級別3 是機動車能夠執行加速、轉向與制動全部的操作,并僅在緊急時需要駕駛人的協助;級別4為完全不需駕駛人操作的狀態。
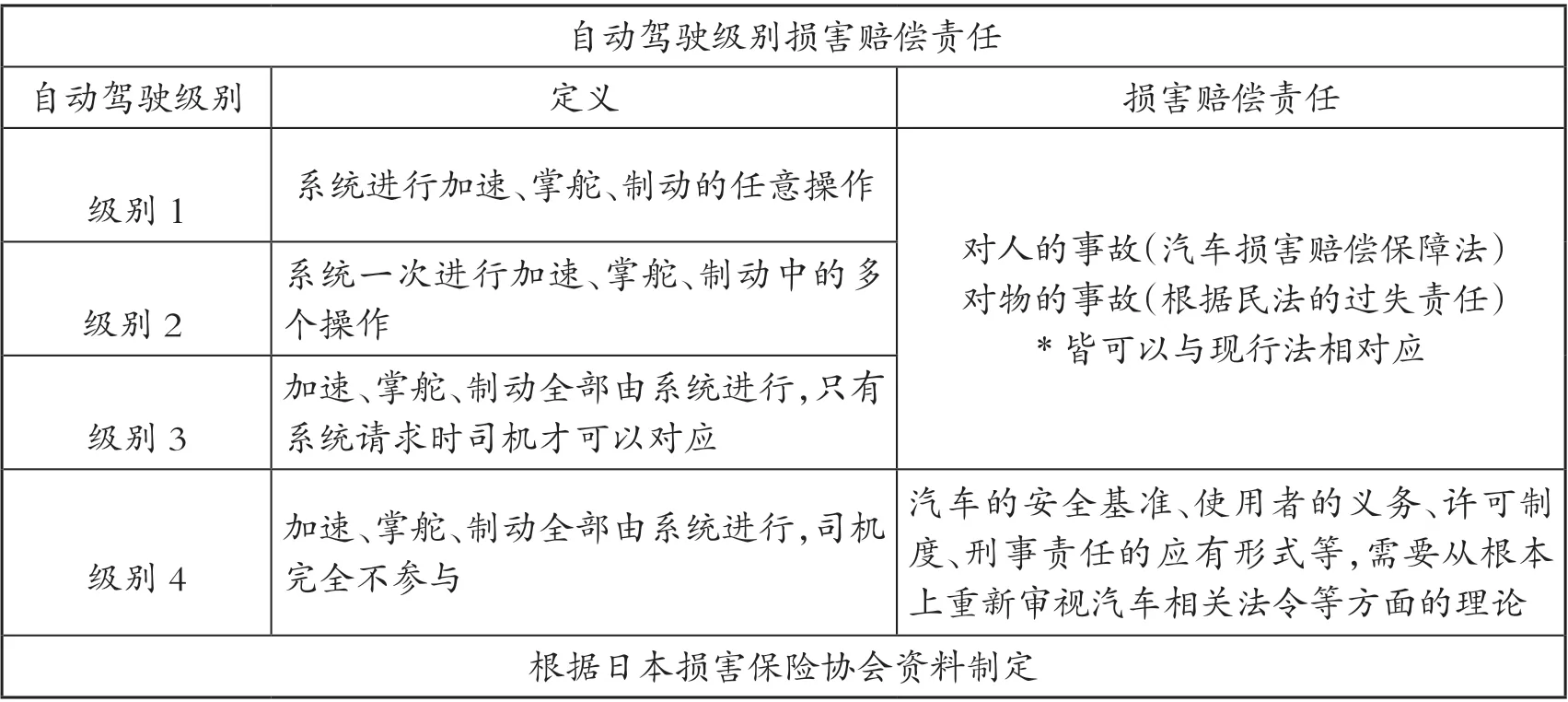
級別2系統一次進行加速、掌舵、制動中的多個操作自動駕駛級別損害賠償責任自動駕駛級別 定義 損害賠償責任級別1 系統進行加速、掌舵、制動的任意操作對人的事故(汽車損害賠償保障法)對物的事故(根據民法的過失責任)*皆可以與現行法相對應 級別3加速、掌舵、制動全部由系統進行,只有系統請求時司機才可以對應 級別4加速、掌舵、制動全部由系統進行,司機完全不參與汽車的安全基準、使用者的義務、許可制度、刑事責任的應有形式等,需要從根本上重新審視汽車相關法令等方面的理論根據日本損害保險協會資料制定
2016 年9 月,隨著美國國家公路交通安全管理局(National Highway Tra★c Safety Administration;NHTSA)公布《聯邦自動車政策》(Federal Automated Vehicle Policy),歐美全面采用SAE J3016 標準,為避免混亂,日本內閣府在2017 年《戰略創新創造項目(SIP)自動駕駛系統的研發計劃》〔6〕參見內閣府:「戦略的イノベーション創造プログラム(SIP)自動走行システム研究開発計畫」による,2017 年9 月28日発表。以及2017年《公私智能道路交通系統(ITS)構想路線圖的定義》〔7〕參見高度情報通信ネットワーク社會推進戦略本部·官民データ活用推進戦略會議:「官民ITS 構想·ロードマップ2017~多様な高度自動運転システムの社會実裝に向けて~」による,2017 年5 月30 日。中,采用了自動系統SAE J3016 標準(表2)。其中,將自動駕駛到無人駕駛階段分為六個級別,SAE 級別0 到SAE 級別2 由駕駛人完成一部分或全部駕駛任務,SAE 級別3 到SAE 級別5 為自動駕駛系統實施一部分或全部駕駛任務。
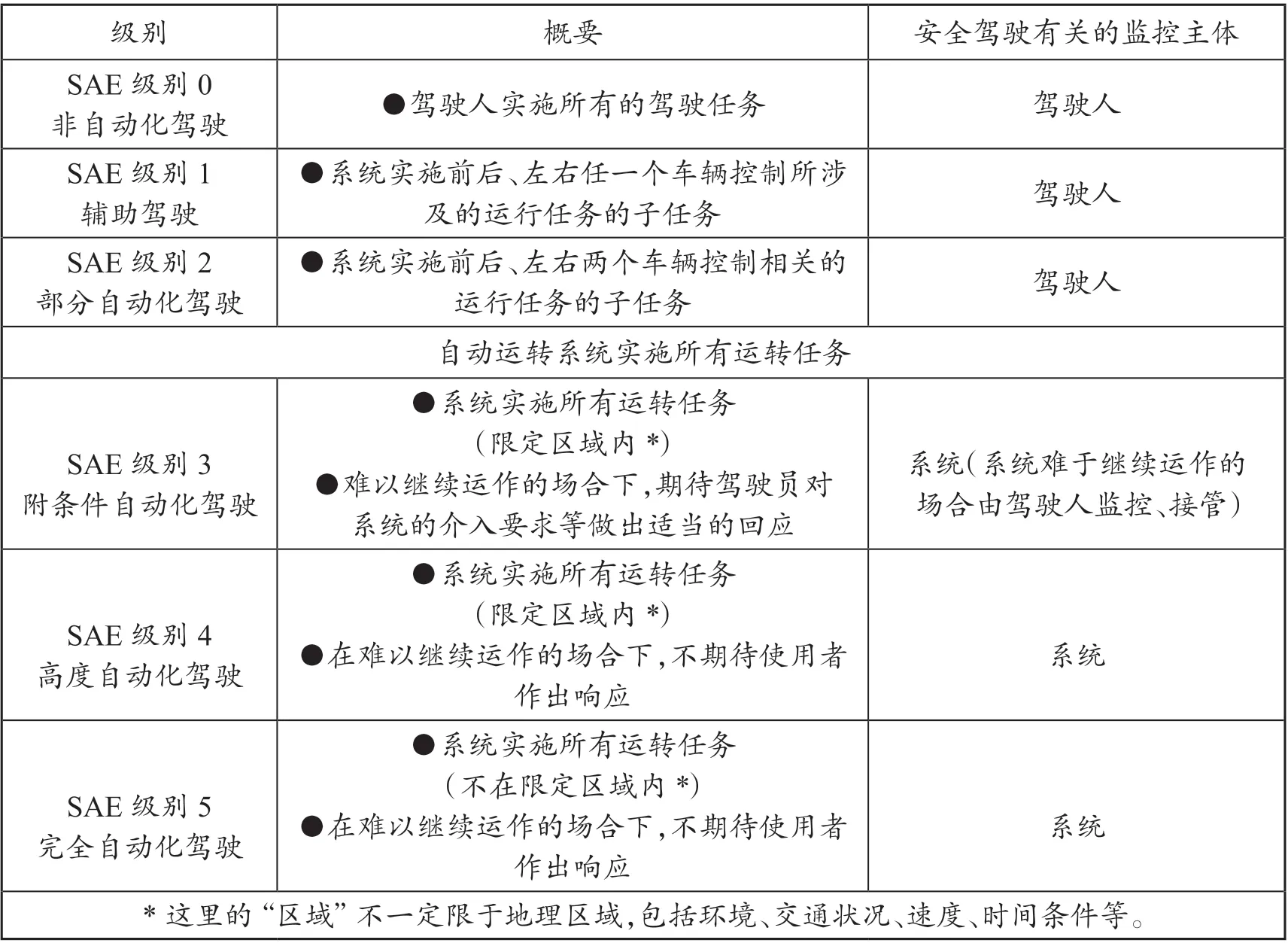
級別 概要 安全駕駛有關的監控主體SAE 級別0非自動化駕駛 ●駕駛人實施所有的駕駛任務 駕駛人SAE 級別1輔助駕駛●系統實施前后、左右任一個車輛控制所涉及的運行任務的子任務 駕駛人SAE 級別2部分自動化駕駛●系統實施前后、左右兩個車輛控制相關的運行任務的子任務 駕駛人自動運轉系統實施所有運轉任務SAE 級別3附條件自動化駕駛●系統實施所有運轉任務(限定區域內*)●難以繼續運作的場合下,期待駕駛員對系統的介入要求等做出適當的回應系統(系統難于繼續運作的場合由駕駛人監控、接管)SAE 級別4高度自動化駕駛●系統實施所有運轉任務(限定區域內*)●在難以繼續運作的場合下,不期待使用者作出響應系統SAE 級別5完全自動化駕駛●系統實施所有運轉任務(不在限定區域內*)●在難以繼續運作的場合下,不期待使用者作出響應系統*這里的“區域”不一定限于地理區域,包括環境、交通狀況、速度、時間條件等。
SAE 級別0 為非自動化駕駛,由駕駛人操控駕駛任務,并對安全駕駛環境監控,在所有情況下執行動態駕駛任務的對應主體是駕駛人;SAE 級別1 為輔助駕駛,在特定的駕駛模式下由輔助駕駛系統根據環境信息控制轉向或加減速中的一種,并由駕駛人監控駕駛環境,在復雜情況下執行動態駕駛任務;SAE 級別2 為部分自動化駕駛,在特定的駕駛模式下由一個或多個智能輔助駕駛系統根據駕駛環境信息控制轉向和加減速,并由駕駛人監控、對應安全駕駛;SAE 級別3 為附條件自動化駕駛,智能系統完成全部駕駛任務(在限定的地理、環境、交通狀況、速度、時間條件的領域內),但對于智能系統難于繼續運作的場合,期望駕駛人介入要求作出應答并接管駕駛操控。在SAE 級別3 的情況,一般由智能系統來監控和對應安全駕駛,但在系統難于繼續運作的場合由駕駛人監控、接管。SAE 級別4 為高度自動化駕駛,智能系統實施全部的駕駛任務(在包含限定的地理、環境、交通狀況、速度、時間條件的領域內),即便駕駛人無法正確響應介入請求并接管操控駕駛,也應由智能系統監控和應答安全駕駛。SAE 級別5 為完全自動化駕駛,由自動駕駛系統在全部時間、全部路況和環境條件下完成全部駕駛任務(不限定區域),對于智能系統難于繼續運作的場合,不期待使用者作出應答、接管,完全由自動駕駛系統來監控和應對安全駕駛有關事項。但是,SAE 級別0~5 中,駕駛人在任何時間都可以介入接管車輛系統的操控。
SAE 級別3 以上的自動駕駛系統稱為智能自動駕駛系統,SAE 級別4、5 的自動駕駛系統稱為完全自動駕駛系統。在完全自動駕駛系統的操作下,甚至不需駕駛人對道路、環境進行實時觀測并作出相應的操作,自動駕駛系統便能做到安全駕駛并采取應急措施。安裝不同級別智能駕駛系統的機動車,駕駛人在認知、判斷、操作等方面的責任分配也將產生相應的變化。
我國對自動駕駛汽車尚未有官方分級,本文引用上述SAE 級別0~5 的分級,基于對現有智能駕駛汽車所引發事故的分析,探討車輛駕駛人、使用者、生產者、銷售者的刑事責任問題。在SAE 級別0~3 中,駕駛人承擔主要駕駛責任,由系統做輔助工作,因此駕駛人具有觀察周圍道路交通狀況等義務。在發生事故的情況下,以駕駛人承擔責任為原則。但是,在自動駕駛模式下是否能夠減輕駕駛人的注意義務就值得探討了。在SAE級別4(限定條件內)、5中,程序設定不需要駕駛人來參與駕駛操作,此時是否能夠完全免除駕駛人的注意義務同樣值得思考。
在中國學界,劉憲權教授創新性地提出:智能機器人在設計和編制的程序范圍外實施了嚴重危害社會的行為,理應受到刑罰處罰。但由于我國現有的以生命刑、自由刑、財產刑和權利刑組成的刑罰體系不能涵括智能機器人,故而提出重構我國刑罰體系,增加以刪除數據、修改程序、永久銷毀等刑罰處罰方式, 將智能機器人納入刑罰處罰的范圍。〔9〕參見劉憲權:《人工智能時代我國刑罰體系重構的法理基礎》,載《法律科學(西北政法大學學報)》2018 年第4 期。長遠看來,劉憲權教授的觀點無疑具有針對未來的原創意義,在學界引起了巨大的關注和爭議。有學者認為,刪除數據、修改程序及永久銷毀的刑罰處罰方式是否能夠達到特殊預防、一般預防與懲罰的刑罰目的存在疑問,而且該種觀點的成立是以人工智能主體已然具備辨認和控制能力為基礎的假設。因此目前,運用人工智能技術操作的智能汽車和機器人尚還在人類的控制范圍之內,人工智能主體失控說的擔憂及其所提倡的前瞻性暫時并不急迫和必要。尤其是,刑事責任是面向人的懲罰措施,所以不能直接聯系到系統責任。〔10〕中山幸二:「自動運転の法的課題」,國民生活10 巻(2017 年)55頁以下參照。在此基礎上,自動駕駛汽車在自主行駛過程中造成事故,對駕駛人、生產者、銷售者、使用者科處刑罰,應當以其未盡到充分的注意義務,或至少具有刑法上的過失為前提。
三、自動駕駛事故的處遇原則
自動駕駛技術得以實現和發展的重要因素在于人類對其安全性的信賴,如果在發生事故后,特別是在駕駛人與系統之間責任歸屬難以明確的情況下,讓駕駛人承擔過失責任會大大降低人們對該技術的期待性與信賴性,致使自動駕駛技術的消費市場極度萎縮和生產者、銷售者的利潤減少,對自動駕駛技術研發資金的投入降低,最終不利于這一領域新興科技的發展。事實上,有調查研究顯示,95%的交通事故與駕駛員的操作失誤有關,〔11〕See Elizabeth Whitman, China Traffic Deaths: Moor Than 200,000 Annual Facilities in Road Accidents, World Health Organization Says, International Business Times, June 5, 2015.而知名咨詢公司麥肯錫早前發布的一份報告稱,自動駕駛汽車的全面普及可減少90%的交通事故,每年可減少1 900 億美元的損害賠償和醫療費用,挽救成千上萬人的生命。〔12〕參見翼飛:《麥肯錫:自動駕駛汽車可減少90%的交通事故》,https://tech.qq.com/a/20150309/007583.htm,2020 年7 月9 日訪問。如果因為刑法的過度介入或不當歸責而致使這一技術發展受挫,顯然會令人遺憾。因此,在技術發展與風險分擔的抉擇中,必須作出審慎判斷。筆者認為,為盡可能鼓勵自動駕駛技術的發展與完善,應盡可能減少刑法規制措施的運用,以民事責任分配作為化解風險承擔的主要方式。
(一)信賴原則化解刑事歸責
基于民眾對自動駕駛技術的信賴,相比信賴原則在傳統刑法過失領域的適用,在自動駕駛引發的事故當中,該原則更應得到重視。信賴原則肇始于德國的判例,原本適用于交通過失案件,為道路交通的高速化、效率化而適當減輕交通參與者的注意義務。隨著信賴原則理論內涵的發展其并不限定適用于交通事故,而是對防止危險具有分工合作關系的所有領域都可以適用。〔13〕參見[日]藤木英雄:《刑法講義總論》,弘文堂1975 年版,第248 頁;陳家林:《外國刑法通論》,中國人民公安大學出版社2009 年版,第241 頁。信賴原則是劃分客觀注意義務界限的基準,限定社會生活上所要求的注意義務的范圍并依此來構筑過失的成立范圍。對于信賴原則的體系定位,有阻卻構成要件該當性和阻卻違法性的不同立場。在阻卻構成要件說下客觀的注意義務為構成要件的內容,而在阻卻違法性說下,基于利益衡量允許的危險理論將客觀的注意義務理解為不法內容。筆者認為,既然信賴原則的理論基礎在于被允許的危險,在以達成更有益的社會目標而允許注意義務人必要的危險行為的場合,該行為的危險程度就已經在構成要件該當性中排除。因此,信賴原則能夠限制構成要件過失的成立范圍。
信賴原則對于過失概念的功能,又有否定預見可能性和否定注意義務的理論分歧。以信賴原則否定或減少注意義務人的預見可能性,以注意義務人行為的危險實現蓋然性極低為理由排除實行行為性,使信賴原則的阻卻范圍過于擴大。而且,不論在自動駕駛還是在人工駕駛的情形,通過駕駛資格考試的駕駛人對于駕駛行為的危險性具有一般認知是不可否認的。因此,以信賴原則否定注意義務人的預見可能性也未區分社會生活的預見可能性和刑法上的具體預見可能性,一概而論稍顯不合理。過失犯注意義務的構建,在舊過失論中以預見義務為中心,在新過失論中以結果回避義務為中心。故而,以信賴原則否定注意義務的立場,又有減少預見義務和減少結果回避之分。前者代表性主張有金澤文雄教授,認為信賴原則在適度危險的情況下,直接可以限制注意義務人的預見義務本身范圍的規范性標準。后者代表性見解有藤木英雄教授,以信賴原則認定結果回避義務的基本要素。即便具有預見可能性,信賴原則的功能在于成為減輕結果回避義務之負擔的理由根據。〔14〕參見陳子平:《刑法總論》,元照出版公司2017 年版,第221 頁。自動駕駛模式下駕駛人的注意義務應限定在預見可能性基礎之上的預見義務,但是過失犯的成立仍以結果回避為重。根據自動駕駛系統級別,對駕駛人注意義務的免除具有嚴格的限制,換而言之,在信賴限度范圍內免除駕駛人的注意義務。
結合不同級別的駕駛模式進行分析,在人工駕駛模式下,車輛未安裝或未啟動具有輔助人類駕駛操作的功能時,自然要否定駕駛人對車輛信賴原則的適用。輔助駕駛模式是車輛具有智能駕駛裝置,但是在這一階段系統只能運行控制方向盤和減速操作中的一項操作。在輔助駕駛模式“定速”狀態下,應肯定駕駛人能夠信賴車輛的前進,但是不能免除駕駛人在道路口負責車輛轉向的注意義務。此外,同人工駕駛一樣,輔助駕駛也不能免除駕駛人員對周圍環境的監測義務。例如,特斯拉屬于SAE 級別2 汽車,技術雖設定駕駛操作由系統執行,但不允許駕駛人對系統全面信賴,駕駛人仍承擔周邊監控與接管義務。上述中國首例特斯拉事故案件、佛羅里達州特斯拉事故案件與2018 年洛杉磯405 高速公路特斯拉事故中,雖然自動駕駛系統具有技術不完備的嫌疑,但是駕駛人也都具有過度信賴自動駕駛系統,疏忽大意或過于自信而未盡到周邊駕駛環境的監控與緊急狀態下駕駛任務的接管義務的情況,最終導致了結果的發生。在駕駛人違反注意義務,過度信賴智能駕駛的場合,駕駛人的刑事責任追究與不具備自動駕駛系統的普通機動車事故的責任追究相同。
在附條件自動駕駛模式下,駕駛人只負責應急情況下對駕駛行為的接管。與完全自動駕駛、高度自動駕駛不同,SAE 級別3 的自動駕駛以限定條件之外駕駛人的介入為必要。在緊急狀態下,由自動駕駛系統向駕駛人發出警示接管,駕駛人未做出接管行為或接管不當時,應追究駕駛人的過失責任。與此相反,SAE 級別4(在限定條件內)和SAE 級別5 為無人駕駛系統,從基礎的駕駛操控到周邊駕駛環境的監控及緊急事態下接管任務的操作全程都由自動駕駛系統執行,駕駛人全程不參與,因此駕駛人可以全面信賴自動駕駛系統,此時應適用信賴原則而免除駕駛人的注意義務。駕駛人不存在以結果預見可能性為前提的結果預見義務以及以結果回避可能性為前提的結果回避義務。
總之,在刑法的責任上,自動駕駛系統的介入將大幅度縮小駕駛人員的刑事責任。自動駕駛級別按照駕駛人與自動駕駛系統對于車輛駕駛操作、周邊監控、接管駕駛行為的責任劃分為標準區分,具有直接代替駕駛人“認知”“判斷”“執行”部分或全部車輛操控的功能,隨著駕駛人的駕駛義務程度減少,注意義務程度也減少。從輔助駕駛、部分自動駕駛、附條件自動駕駛到高度自動駕駛、完全自動駕駛,自動駕駛系統所采用的技術呈現高科技化特點,甚至能夠達到不限條件的情形下,無需駕駛人參與駕駛行為。因此,相比人工駕駛,應肯定駕駛人信賴自動駕駛系統,相應地免除其注意義務,不能追究駕駛人的結果回避責任。〔15〕同前注〔10〕,中山幸二文。但是,在由于對自動駕駛系統的過于信賴和信賴錯誤引起事故的場合,不能免除駕駛人的過失責任。在輔助駕駛模式下,駕駛人對自動駕駛系統的信賴最高只能達到當前執行的操作,不能期待系統能夠同時執行方向盤和制動;部分自動駕駛模式中,駕駛人最高信賴的程度限于駕駛操作,而不包括周邊環境的監控及對緊急狀態的應答;附條件自動駕駛模式中,駕駛人對系統的信賴程度較高,不具有隨時注意駕駛環境的義務;高度自動駕駛(在限定條件內)、完全自動駕駛模式下,允許駕駛人全面信賴系統。
(二)民事責任分攤技術風險
刑法上的不歸責不代表民事上也不承擔責任,對此,應當區別自動駕駛汽車所產生的民事責任和刑事責任。民法上對自動駕駛汽車造成損害賠償責任的規定,無論是基于嚴格責任制度還是民事替代責任制度,其作為一種特殊的侵權責任,是從整個社會利益之均衡、不同社會群體力量之對比,以及尋求補償以息事寧人的角度來體現民法的公平正義觀。〔16〕參見龍敏:《自動駕駛交通肇事刑事責任的認定與分配》,載《華東政法大學學報》2018 年第6 期,第77-82 頁。這一點與刑法所要求的責任主義完全不同。因此,在上述駕駛人或生產者、銷售者不承擔刑事責任的情形,都有承擔民事責任的余地。
不過,在民事責任的分配上看,原則上既不應讓用戶為自動駕駛系統負擔過重責任,同時又不能要求生產銷售者承擔過多責任以致抑制自動駕駛技術創新。一方面,自動駕駛技術具有高度技術性、復雜性和未知性,如果由用戶因自動駕駛系統故障問題過多承擔無過錯責任,會很大程度上打擊潛在用戶購買和使用的積極性,進而限制自動駕駛技術的轉型升級與產業推廣。〔17〕參見張力、李倩:《高度自動駕駛汽車交通侵權責任構造分析》,載《浙江社會科學》2018 年第8 期,第40 頁。例如,在自動駕駛模式下,如果系統沒有發出警示而發生交通事故,那么此時可以認為用戶沒有過錯,但可以依照《道路交通安全法》第76 條等交通法規及司法解釋要求其承擔不超過百分之十的賠償責任。對于普通的交通事故責任而言,不超過百分之十的責任是依照優者危險負擔規則,這雖然不是典型的公平責任原則,但通過讓機動性能強的一方多承擔責任,保護了弱者利益。另一方面,過于絕對的生產者責任可能同樣會抑制技術的進步。〔18〕參見楊立新:《侵權責任法》,北京大學出版社2014 年版,第284 頁。因此,對人工智能技術的創新不應當苛加以高額的賠償風險。但相較而言,由汽車制造商一方多承擔責任是更為妥當的。這是因為,首先從救濟受害人的角度來看,由于制造商通過銷售自動駕駛汽車能夠獲得巨大利益,經濟實力更強,讓其承擔責任能夠充分救濟受害人,也符合風險與收益一致的原則。其次從預防損害發生的角度分析,制造商作為編寫自動駕駛系統算法程序的主體,由其承擔責任能夠督促其更新算法,持續提升自動駕駛技術的安全性能。最后,讓制造商一方承擔責任也有助于增強消費者的購買信心,消費者可以沒有后顧之憂地享受自動駕駛技術帶來的便利,最終推動自動駕駛產業的發展和繁榮。〔19〕參見鄭志峰:《自動駕駛汽車的交通事故侵權責任》,載《法學》2018 年第4 期,第21-23 頁。
事實上,除了讓用戶和生產者、銷售者承擔自動駕駛造成的民事責任外,更為重要也更為有利的方式是通過保險責任來分攤和化解整個由技術發展可能帶來的風險,這一點是刑法解決問題所不可比擬的。保險責任既能夠直接保障受害者獲得一定的賠償,提高自動駕駛系統在社會中的接受程度,同時也可以為生產者減輕一定的負擔,從而為技術創新創造更多的空間。就目前既有的保險模式來看,自動駕駛汽車保險包含三層結構,包括傳統的汽車所有人或管理人投保的交強險、使用人或生產者投保的商業險以及生產者或銷售者投保的產品責任險。這三層保險賠付的順位應該依次為交強險首先承擔,交強險賠付不足的由商業險承擔,在涉及產品責任的承擔或追償時由產品責任險承擔賠償。〔20〕參見韓旭至:《自動駕駛事故的侵權責任構造——兼論自動駕駛的三層保險結構》,載《上海大學學報(社會科學版)》2019年第2 期,第101 頁。此外,作為對自動駕駛技術的支持與進一步風險分攤化解的方式,民事領域中還可以考慮建立賠償基金,作為強制保險制度的一個補充,以此確保未被保險覆蓋的損害可以得到彌補。〔21〕參見司曉、曹建峰:《論人工智能的民事責任:以自動駕駛汽車和智能機器人為切入點》,載《法律科學(西北政法大學學報)》2017 年第5 期,第171-172 頁。因此,總體來說,如果在化解技術帶來的風險分擔問題上能靈活運用《道路交通安全法》等公法及民法中的責任分擔規定,能夠比單純適用刑法起到更好的效果。〔22〕參見儲陳城:《人工智能時代刑法歸責的走向——以過失的歸責間隙為中心的討論》,載《東方法學》2018 年第3 期,第37 頁。
四、刑事歸責的具體分析
人工智能時代,技術的濫用可能將人類社會推進到深度風險之中,可以說自動駕駛技術的應用與發展本身就是風險社會的一個“征表”。立足于刑法對社會風險的積極預防立場,有學者提出應構建直接由人工智能機器人自身承擔刑罰的責任模式。〔23〕參見李婕:《智能風險與人工智能刑事責任之構建》,載《當代法學》2019 年第3 期,第32-33 頁。但是,一方面,要想成為法律責任的主體(法律上的人)就必須是權利和義務的主體,而人工智能義務與權利的自始分離使之根本無從獲取法律人格。〔24〕參見冀洋:《人工智能時代的刑事責任體系不必重構》,載《比較法研究》2019 年第4 期,第126 頁。另一方面,社會學對傳統社會與風險社會的區分是相對的,傳統社會也有風險,風險的發展是一個連續的過程,刑法對這種變化自然會作出反應,但是這種反應未必能夠引起刑法的質變。換言之,當下人工智能與過往的計算機技術一樣正持續促進刑法的量變,而包括自動駕駛技術在內,遠未達到引起刑法質變從而構建新的責任模式的可能。〔25〕同前注〔4〕,董玉庭文,第124-128 頁。因此,自動駕駛引發事故的責任承擔主體,依然限為傳統刑法所可能規制的主體,包括駕駛人、汽車所有人(運行供用人)〔26〕“運行供用人”在日本法中系指為了自己讓汽車用于行駛的人。、汽車生產商的相關人員、自動駕駛控制程序的開發人員、向自動駕駛汽車提供數據的人員、國家及地方公共團體的相關人員等。〔27〕參見 松宮孝明:《AI 與刑法——以自動駕駛相關問題為中心》;孫文譯,載《第五屆中日經濟刑法研討會論文集(2019)》,第18-20 頁。以下,筆者將結合具體情形對上述部分人員的刑事歸責進行分析。
(一)非法利用自動駕駛汽車進行故意犯罪者的刑事責任
無人駕駛技術近乎完全依靠計算機系統、網絡及大數據信息配合操作完成,因此完全有被不法分子利用的可能。事實上,早在2015 年就曾發生過黑客利用系統存在的安全漏洞,通過計算機侵入名為Uconnect 的觸屏車載無線電系統,成功對一輛切諾基多功能越野車進行遠程控制的事件。這使得菲亞特克萊斯勒美國公司不得不宣布召回約140 萬輛存在軟件漏洞的汽車。〔28〕參見https://finance.sina.com.cn/chanjing/gsnews/20150725/213522791451.shtml, 2020 年7 月10 日訪問。如果再聯想到極端恐怖分子早就開始利用普通汽車制造“汽車炸彈”,那么事實上非法利用無人駕駛汽車進行故意犯罪可能涉及的罪名就遠不止侵犯計算機信息系統等相關犯罪。
具體而言,非法利用自動駕駛汽車進行的故意犯罪主要包括以下三種類型:第一,純粹將汽車本身作為犯罪工具實施的犯罪,如利用無人駕駛汽車運送毒品,利用無人駕駛汽車實施爆炸行為等。此時,汽車只是單純地作為犯罪工具而存在,對于背后的利用者只需依照相應行為定罪量刑即可。如同網絡犯罪一樣,犯罪手段的更新并不會改變傳統犯罪的本質。〔29〕參見陳結淼、王康輝:《論無人駕駛汽車交通肇事的刑法規制》,載《安徽大學學報(哲學社會科學版)》2019 年第3 期,第121-122 頁。第二,通過攻擊自動駕駛運行相關的計算機系統而實施的犯罪。如前所述,自動駕駛技術的運行完全依靠系統軟件的運行及數據分析操作,如果黑客等不法分子通過網絡技術攻擊、篡改了車載系統或云端數據等,則首先會構成非法侵入計算機信息系統罪,非法獲取計算機信息系統數據、非法控制計算機信息系統罪以及提供侵入、非法控制計算機信息系統程序、工具罪等。此外,如果是通過植入病毒或其他手段致使自動駕駛運行系統徹底癱瘓報廢,還可能涉及故意毀壞財物罪、破壞交通工具罪等。〔30〕參見皮勇:《人工智能刑事法治的基本問題》,載《比較法研究》2018 年第5 期,第161-162 頁。第三,必須注意的是,前述第二種犯罪行為往往只是行為人后續犯罪行為的手段行為或預備行為,必須明確自動駕駛系統涉及的是公共交通安全,尤其是其運行背后所賴以支撐的數據信息關涉成千上萬用戶的生命和財產安全,因此這種攻擊計算機信息系統的行為往往也是危及不特定人或者多數人公共安全的行為。在行為人面對不特定的對象或針對大數據存儲、傳輸系統本身攻擊時,如果只是將其認定為破壞計算機信息系統等擾亂公共秩序犯罪,則只關照到問題的表象。換言之,應當充分認識到,攻擊系統的行為有可能只是侵害其他法益的新手段,必要時完全能夠以危害公共安全罪對其進行規制。〔31〕參見郭旨龍:《中國刑法何以預防人工智能犯罪》,載《當代法學》2020 年第2 期,第48 頁。
(二)駕駛人存在主觀罪過的刑事責任
無行為則無犯罪,在有關自動駕駛的事故中,只有駕駛人在直接或間接地承擔車輛駕駛任務、周圍駕駛環境的監控任務及緊急狀態下的駕駛接管任務的場合下,才能考慮將事故責任歸責于駕駛人,認定其具有主觀故意或過失。事實上,在SAE1~4 級別(限定條件范圍之外),駕駛、監控與接管等全部駕駛操作完全依賴于駕駛人,此時其實質與人工駕駛相同。如果駕駛人是出于故意而操控車輛造成事故,那么處于輔助地位的汽車依然只能淪為“工具”的地位,而直接追究駕駛人的刑事責任即可。而如果是由于駕駛人存在過失導致交通事故的,則可以比照SAE0 非自動化駕駛狀態追究刑事責任。只不過,在SAE1~4 級別(限定條件范圍之外),駕駛人在成立過失犯罪時所要求的注意義務會與傳統汽車駕駛人的注意義務有所差別。例如,傳統的汽車駕駛人在駕駛車輛行駛時除了履行必要的注意義務,如不酒后駕駛等,還要時刻遵守謹慎駕駛的注意義務,如根據路況調整車速、打轉向燈等。而在輔助駕駛的情況下,很多謹慎駕駛的要求都對駕駛人放寬了,如對車速的適時調控、路況環境監測等都可以轉由自動(輔助)駕駛系統完成,此時駕駛人相應的注意義務轉變為根據路況正確的選擇使用自動駕駛系統、在自動駕駛系統發出請求或者在駕駛員認為有必要時及時接管汽車,以及在智能汽車自動駕駛期間保持必要的警覺等義務,以此避免危害結果的發生〔32〕同前注〔16〕,龍敏文。。可以肯定的是,作為在SAE1~4級別(限定條件范圍之外)下的駕駛主體,駕駛人違反了上述注意義務造成嚴重危害結果,同樣值得作為過失犯進行處罰。
結合具體的法律規范來看,我國關于直接規制機動車駕駛行為的法律主要以交通運輸管理法規為基礎,違反交通運輸管理法規造成重大傷亡或者使公私財產遭受重大損失的,依照《刑法》第133條交通肇事罪和第133 條之一危險駕駛罪追究其責任主體的刑事責任。其中,公路交通運輸管理法規主要有《公路法》《道路交通安全法》等,為保證公路交通安全而規定了與其有直接關系的勞動紀律、交通規則、操作規程等。完全自動化駕駛即級別5 的自動駕駛技術中,由自動駕駛系統在全部時間、全部路況和環境條件下完成全部駕駛任務,技術完全支持不需駕駛人做出任何操控駕駛行為,包括基礎駕駛任務、駕駛環境的監控任務及應急駕駛接管任務。因此,乘坐級別5 的自動駕駛汽車,駕駛人的立場如乘坐出租車的乘客一樣,可以完全信賴自動駕駛系統,甚而此處能否稱之為“駕駛人”也產生疑問。對此,“駕駛人”醉酒后乘坐于駕駛人位置,啟用自動駕駛模式的情況,不符合《刑法》第133條之一危險駕駛罪的構成要件行為,不以危險駕駛罪論。
在道德倫理上,每一位駕駛人在公共道路上駕駛,都應當為自己的生命負責、為他人的生命負責而謹慎行駛,具有不可推卸的高度注意義務。但是,在完全自動化駕駛階段,自動駕駛技術已經逐步成熟,應對所有可能的突發事件,人工智能采用大數據運算能夠比駕駛人反應更加敏銳,作出應答更加迅速、準確。因而,在科學技術層面,完全自動化駕駛級別不要求駕駛人對結果具有預見或者回避能力,即使駕駛人在已經預見或認識到的狀態也不能要求駕駛人做出相應的駕駛接管或者其他駕駛行為,甚至無需駕駛人具有平常的注意義務。駕駛人在沒有應當預見、應當回避駕駛行為危害結果的狀態下,其便喪失了主觀歸責的基礎。在完全自動化駕駛狀態下發生事故,有理由認為“駕駛人”理應認識到自動化駕駛行為的風險,是一種被害人自我答責與風險承受的選擇,不再適用《刑法》第133條交通肇事罪的規定。
SAE 級別4 即高度自動化駕駛技術,自動駕駛系統在限定的地理、環境、交通狀況、速度、時間條件之內,執行全部駕駛任務并由自動駕駛系統監控駕駛環境和對應急情況作出駕駛接管應答。在限定的條件內,啟用高度自動化與完全自動化駕駛技術的駕駛人責任相同。在限定范圍之外,安裝自動化裝置的機動車與現有市場上的機動車同樣,駕駛人以積極作為的方式酒后駕駛、無證駕駛、闖紅燈、超速、超寬、超載、違章超車等;以消極的不作為,如轉向不顯示指示燈、通過道口不鳴笛示警、通過岔路口不減速等,而導致發生重大事故,致人重傷、死亡或者使公私財產遭受重大損失,構成《刑法》第133 條交通肇事罪。若行為人故意在道路上駕駛機動車追逐競駛,情節惡劣,或醉酒駕駛機動車,構成《刑法》第133 條之一危險駕駛罪。高度自動化駕駛在非限定的范圍內,與當前國內市場所常見的機動車事故的責任分配同樣,具有適用交通肇事罪、危險駕駛罪的空間。
SAE 級別3 為附條件自動化駕駛,自動駕駛系統在限定的條件下,完成駕駛行為與對環境的監控任務,但是駕駛人需要保持對車輛應急情況作出駕駛接管應答,即駕駛人在此具有隨時接管操控車輛駕駛的注意義務。由于駕駛人的疏忽大意未意識到或對自動駕駛系統過于自信而在緊急狀態下發生重大交通事故,駕駛人應構成交通肇事罪。在附條件自動駕駛模式下,駕駛人的主觀罪過只在駕駛人接管操控駕駛任務的范圍內,成立危險駕駛罪或交通肇事犯罪。
目前絕大多數汽車都已經達到了部分自動駕駛(SAE 級別2),例如ACC 自適應巡航和撥動轉向燈即可實現自動變道行駛、中國首例自動駕駛事故的特斯拉轎車等。在部分自動駕駛模式下,自動駕駛系統可以獨立完成一些組合行駛需求,但駕駛人仍起著主要作用,駕駛人負責對駕駛環境的監控以及接管駕駛操控,因此仍需要駕駛人將雙手雙腳預備在方向盤及制動踏板上隨時待命。因此,筆者認為在SAE 級別1、2 自動駕駛系統中,雖然車輛系統能夠執行部分駕駛任務(前后左右),但是駕駛環境監控任務與接管操控任務主要依賴于駕駛人,駕駛人的注意義務不低于人工駕駛模式。在部分自動駕駛、輔助駕駛、人工駕駛模式下,駕駛人具有監控任務意味著駕駛人要隨時注意行駛危險狀態的出現,并且應避免、防止交通事故的發生。如中國首例自動駕駛事故案件,駕駛人過度信賴自動駕駛系統,而未能及時注意前方障礙物的出現而導致事故的情況,筆者認為駕駛人主觀上至少存在疏忽大意或過于自信的過失,具有適用《刑法》第133 條交通肇事罪的可能。
(三)“肇事逃逸者”的刑事責任
在駕駛人的過失責任之后,同樣值得探討的是在完全自動駕駛模式下肇事后逃逸的情節應作何刑事判斷。根據前述觀點,駕駛人對于完全自動駕駛狀態引起的事故不負刑事責任,但是在肇事后因逃逸致人死亡是否構成交通肇事罪的加重結果犯。我國《刑法》第133 條規定的“因逃逸致人死亡的,處七年以上有期徒刑”,是對符合《刑法》第133 條交通肇事罪基本犯罪構成要件行為,并造成構成要件以外加重結果的處罰。因此,在否認駕駛人構成交通肇事罪的前提下,同時也應否認構成其結果加重犯。除此之外,自動駕駛肇事后,駕駛人逃逸,未及時救助被害人致其死亡,是否考慮轉化為故意殺人或過失致人死亡。“因逃逸致人死亡”僅指消極地不救助,而不包括積極地將被害人轉移、丟棄至較為偏僻、難于人發覺的地方。此駕駛人構成故意殺人與過失致人死亡只能基于不履行救助義務的不作為。在承認完全自動駕駛模式自動駕駛系統已經完全脫離駕駛人的駕駛行為狀態下,按照責任主義原則的要求,斷切事故結果與駕駛人駕駛行為的因果關系。使被害人處于被救助地位是自動駕駛系統的肇事行為,因而自動駕駛系統產生管理、監督危險源的作為義務。按照前述觀點,此時駕駛人處于“局外人”地位,并不產生對被害人的救助義務,也無從談起駕駛人的刑事責任。但是在自動駕駛模式下肇事后,駕駛人逃逸致人重傷、死亡而不負刑事責任無疑是一種鼓勵逃逸行為的做法,其實質是不合理的。對此,筆者認為可以通過對不報、謊報安全事故罪進行擴張解釋進行處理。
無論基于犯罪論還是刑罰論的視角,自動駕駛系統導致事故,駕駛人不存在主觀罪過的情況下,無法歸責于系統責任。尤其,自動駕駛模式造成交通事故,自動駕駛車駕駛人或乘車人逃逸致使被害人死亡、重傷的情況下,無法追究駕駛人、乘車人的責任。為避免交通事故結果的擴大或者造成其他嚴重后果,在事故發生后,應賦予駕駛人報告交通事故情況的義務。〔33〕[日]山下裕樹「スヴエン·ヘテイッチユ=エリザ·マイ「道路交通における自動化されたシステムの投入における法的な問題領域」」,千葉大學『法學論集』32 巻1·2 號(2017 年)130 頁以下參照。在不報或者謊報事故情況,導致貽誤事故搶救,情節嚴重的,以不報、謊報安全事故罪論處。
我國《刑法》第139 條之一規定,在安全事故發生后,負有報告職責的人員不報或者謊報安全事故情況,貽誤事故搶救,情節嚴重的,處三年以下有期徒刑或者拘役;情節特別嚴重的,處三年以上七年以下有期徒刑。本罪所述的安全事故應包含《刑法》第131 條至第138 條規定的安全事故:重大飛行事故、鐵路運營安全事故、交通肇事、危險駕駛、重大責任事故、重大勞動安全事故、強令違章冒險作業、大型群眾性活動重大安全事故、危險物品肇事、工程重大安全事故、教育設施重大安全事故和消防責任事故。因此,“安全事故”也應當包括自動駕駛模式所導致的交通事故。
根據最高人民法院、最高人民檢察院2015 年12 月14 日《關于辦理危害生產安全刑事案件適用法律若干問題的解釋》,“負有報告職責的人員”是指負有組織、指揮或者管理職責的負責人、管理人員、實際控制人、投資人,以及其他負有報告職責的人員。在普通的機動車肇事中,駕駛人是車輛的實際控制人、管理人員。在高度自動駕駛(限定條件內)與完全自動駕駛模式中,駕駛人能夠全面信賴自動駕駛系統,從而免除注意義務。但是,根據我國《道路交通安全法》第70 條規定,在道路上發生交通事故,車輛駕駛人應當立即停車,保護現場;造成人身傷亡的,車輛駕駛人應當立即搶救受傷人員,并迅速報告執勤的交通警察或者公安機關交通管理部門。因此,駕駛人雖然不是車輛的直接控制人,不論在接管自動駕駛任務還是未接管任務的場合,駕駛人都具有報告事故的法定義務。因而,在自動駕駛事故中,駕駛人基于《道路交通安全法》的法定義務而產生管理義務,應視作為管理人員。在SAE 級別4、5 的自動駕駛模式下,駕駛人的地位雖同乘車人,但對于發生事故后的責任分擔具有明顯的差異,駕駛人負有救助與報告義務,而乘車人只予以協助。如在自動駕駛事故中,承認乘車人的管理人地位將會導致責任的混亂與行為標準的不統一。例如,2018 年2 月28 日,阿拉伯迪拜將無人駕駛出租車(自動吊艙)投入使用,最多可乘坐十個乘客。在無人駕駛出租車發生交通事故,造成1 人死亡的情形,一人的責任違反會導致刑事“連帶責任”。換言之,只有一位乘客及時履行報告義務,則其他乘客的不報或者謊報事故情況行為不構成本罪,也不成立本罪的未遂犯。因此,不應將乘車人視為對自動駕駛車負有管理職責的管理人員。
本罪的不報或謊報事故情況行為,必須發生在安全事故之后,但不要求發生在安全事故完全結束之后。不報或者謊報行為,只有在使事故結果加重或者擴大的狀態下,導致貽誤事故搶救,并且情節嚴重的,才構成本罪。根據上述司法解釋,具體有下列情形之一的,屬于“情節嚴重”:(一)導致事故后果擴大,增加死亡1 人以上,或者增加重傷3 人以上,或者增加直接經濟損失100 萬元以上的。(二)實施下列行為之一,致使不能及時有效開展事故搶救的:1.決定不報、遲報、謊報事故情況或者指使、串通有關人員不報、謊報事故情況的;2.在事故搶救期間擅離職守或者逃匿的;3.偽造、破壞事故現場,或者轉移、藏匿、毀滅遇難人員尸體,或者轉移、藏匿受傷人員的;4.毀滅、偽造、隱匿與事故有關的圖紙、記錄、計算機數據資料以及其他證據的。(三)其他嚴重的情節。
本罪的責任形式為故意,負有報告職責的人員明知不報或者謊報事故情況的行為,會發生貽誤事故搶救的結果,并且希望或者放任這種結果的發生。因此,在安全事故發生后,教唆或者幫助負有報告職責的人員不報或者謊報情況,或與負有報告職責的人員串通,不報或者謊報事故情況,貽誤事故搶救,情節嚴重的,構成本罪的共犯。
(四)自動駕駛系統導致事故的刑事責任
2018 年2 月,在洛杉磯405 高速公路上,一輛處于自動駕駛模式的特斯拉Model S 轎車撞上了一輛停在路邊的消防車。因自動駕駛系統無法檢測出行駛狀態中所遇到的所有物品,所以無法對車輛進行制動或減速而導致事故。〔34〕See Jack Stewart:Why Tesla’s Autopilot Can’t See a Stopped Firetruck,(Mar.14,2018),https://anith.com/why-teslas-autopilotcant-see-a-stopped-firetruck/.現階段的自動駕駛系統的設定原理,其實是對所有靜態障礙物的忽略,自動駕駛系統的傳感器只能探測到移動中的物體。忽略對技術的探討,對于自動駕駛系統責任而導致事故的場合,應區分兩種不同情況:第一,自動駕駛系統存在技術上不完備的狀態;第二,自動駕駛系統雖完備,卻判斷錯誤而導致事故的狀況。根據我國現行刑法規定,無法直接對計算機信息系統或者自動駕駛系統歸罪,只能對涉及系統的研發者一方(通常包括生產者、銷售者)追究刑事責任。
1.自動駕駛汽車生產者、銷售者的刑事責任
首先需要討論的是,自動駕駛汽車的生產者、銷售者是否需要為自動駕駛故障引發的交通事故承擔類似于交通肇事罪等過失責任。對此,理論上主要存在肯定說和否定說兩種觀點。肯定說認為,特別是在高度自動駕駛的場合,已經欠缺傳統的“駕駛人”這一角色了。此時,基于車輛制造商或軟件、零部件的產品開發者所具有的“前瞻能力”,其所承擔的注意義務也與傳統過失犯罪所要求的注意義務的當場性、即時性不同,作為生產者、制造者,其具有的結果避免義務是先期的、前瞻性的,如果在其制造、生產階段就違反了這種注意義務,則在事故發生時可以成立相應過失犯罪。〔35〕同前注〔2〕,彭文華文。否定說對此提出批評,認為注意義務不是抽象的而是具體的,由于設計者、生產者或使用者不可能預見到自動駕駛期間可能出現的各種意外,因此即使自動駕駛引發交通事故,也不能因為設計、生產或使用自動駕駛汽車可能引發交通事故而理所當然地對設計者、生產者或使用者追究過失犯罪責任,否則無異于承認嚴格責任。〔36〕參見江溯:《自動駕駛汽車對法律的挑戰》,載《中國法律評論》2018 年第2 期,第186 頁。有學者認為,由于人工智能可能造成的社會危害性大,并且研發者和使用者在大多數情況下對人工智能產品具有一定的把控力,因此可以考慮在刑法中確立人工智能產品研發者和使用者的嚴格責任。同前注〔16〕,龍敏文,第79 頁。但筆者認為,民法領域和英美刑法中對“嚴格責任”的規定不能成為認定涉人工智能犯罪時適用嚴格責任原則的參照。民法側重的是對社會關系的維護和修復,刑法側重的是對行為人行為的定性和處罰,其側重點與民法明顯不同。在刑法領域中適用嚴格責任原則不僅有違責任主義原則而且會嚴重遏制人工智能技術的發展。參見劉憲權:《涉人工智能犯罪中的歸因與歸責標準探析》,載《東方法學》2020 年第3 期,第72-74 頁。并且,如果根據抽象判斷來認定過失,將最終導致在邏輯上認定任何可能導致危害結果發生的行為都是過失行為。脫離具體行為與具體結果抽象地判斷過失成立與否,可能會導致無論行為與結果之間的聯系多么間接,行為人對具體結果能否預見,都可能得到肯定過失成立的結果,有違責任主義。〔37〕參見周銘川:《論自動駕駛汽車交通肇事的刑事責任》,載《上海交通大學學報(哲學社會科學版)》2019 年第1 期,第41-42 頁。此舉無異于滑向了新過失論,會導致禁止所有危險行為,顯然不合適。
但是,不因具體的事故追究自動駕駛汽車生產者、銷售者的責任,不代表其無需承擔任何刑事責任。自動駕駛汽車作為一款與用戶生命財產安全具有緊密聯系的產品,其產品質量本身應當受到嚴格的標準規范與關注。因此,生產者、銷售者在將產品投入市場流通后,發現存在缺陷的,應當及時采取警示、召回等補救措施。對于生產者、銷售者將沒有完全消除對人身安全隱患的車輛強行推入市場或者未召回其存在技術缺陷的車輛的行為,除了承擔相應的民事侵權責任之外,還應追究其刑事責任。根據我國現有刑法規定,對于生產者、銷售者在已經明知為缺陷產品,但未中止生產、銷售,或者未召回已經投入市場流通的產品等不作為的情況,考慮適用《刑法》第146 條生產、銷售不符合安全標準的產品罪或第140 條生產、銷售偽劣產品罪追究刑事責任。例如,在完全或高度自動駕駛模式下發生事故的原因在于車輛自動駕駛系統不能夠探測到前方障礙的情況,首先應判斷該技術缺陷是否已經符合保障人身、財產安全的國家標準、行業標準。若不符合,生產者、銷售者明知該產品缺陷而仍然生產、銷售或未中止生產、銷售,或者對于已經投入市場流通的產品未采取警示、召回等措施的,構成生產、銷售不符合安全標準的產品罪。在行為人生產、銷售了不符合安全標準的產品,但是并沒有造成嚴重后果時,如果行為人的銷售金額或貨值金額達到定罪標準,按照生產、銷售偽劣產品罪處理。在行為人生產、銷售不符合安全標準的產品,不僅銷售金額達到5 萬元,而且也造成致人重傷死亡或者造成其他重大財產損失的情況,構成生產銷售不符合安全標準的產品罪與生產銷售偽劣產品罪的競合。〔38〕參見王作富:《刑法分則實務研究》,中國方正出版社2010 年版,第214 頁。
由于在現行日本刑法典中僅規定自然人犯罪,未將單位作為犯罪主體,因此不能對生產、銷售企業按照《日本刑法》第211 條業務上過失致死傷罪進行定罪處罰。對此情況,其理論當中有觀點認為將單位犯罪轉換為個人犯罪,將生產、銷售企業的責任人員、主管人員作為實行行為主體,進而考慮是否構成業務上過失致死傷罪。〔39〕參見中川由賀「自動運転に関するドライバー及びメーカーの刑事責任~自動運転の導入に伴って生じる問題點と今後のあるべき方向性~」CHUKYO LAWYER27 巻(2017 年)17 頁參照。對于這一問題,我國《刑法》第150 條明確規定了單位犯本節第140條至第148 條規定之罪的,對單位判處罰金,并對其直接負責的主管人員和其他直接責任人員,依照各該條的規定處罰。因此,對作為單位主體犯的生產者、銷售者歸責并無障礙。但是,探討生產者的刑事責任,以其至少具有結果預見可能性的過失為前提。由于機動車是結構復雜的高科技產品,甚至對于現階段普遍的SAE 級別0~2 的機動車而言,生產者在開始投入使用期很難發現故障或者缺陷,機動車也很少在使用過程的初期就出現故障。因此,以銷售之前的時點作為肯定生產者、銷售者的結果預見可能性是不合理的。尤其對于自動駕駛車而言,自動駕駛技術是一種新興科技,技術發展還未成熟,因此對于生產者、銷售者的預見義務不宜做更高的要求。
同樣,在對直接負責的主管人員和其他直接責任人員歸責時,也尤為需要注意的是,不論生產者、銷售者是以違背行業規范而過失導致缺陷車輛進入市場的行為,還是以不作為的方式即不召回問題車輛等行為構成生產、銷售偽劣產品罪或生產、銷售不符合安全標準的產品罪,都要求行為人能夠對具體的產品缺陷有認識或對可能導致的危害結果有預見。而鑒于自動駕駛技術是一個尚在發展完善的技術,并且相關行業的國家標準及產業標準都未明確,對其研發人員以及生產銷售主體仍不能科以過高的注意義務。根據《產品質量法》,生產者在將產品投入流通時,在科學技術水平尚不能發現缺陷存在的情況下,生產者免責。舉輕以明重,此種情況當然也不構成犯罪。〔40〕參見劉憲權:《人工智能時代的刑事風險與刑法應對》,載《法商研究》2018 年第1 期,第7-8 頁。應當認識到,技術的發展和風險的存在總是如影隨形的,要想鼓勵技術的創新和發展,就必須在一定范圍內對與技術相伴而生的風險保持寬容的心態。如果對研發者根據風險發生時技術發展水平尚無法預見而導致后果的情況也一律采用刑事手段予以規制的話,必然會對技術的研發和進步造成致命打擊,這顯然違反了刑法中主客觀相結合的原則,而且從根本上也違反了人類社會的整體利益。〔41〕參見劉憲權:《涉人工智能犯罪刑法規制的路徑》,載《現代法學》2019 年第1 期,第78 頁。因此,在判斷自動駕駛汽車的生產者、銷售者是否能夠預見產品存在缺陷時,要以研發自動駕駛汽車當時的科學技術能力為標準。倘若依照當時的人工智能發展技術根本無法認識到產品質量是否符合既有標準或無法預見到可能存在的缺陷,則不能對生產者、銷售者歸責。〔42〕參見林雨佳:《自動駕駛事故中的過失犯罪分析》,載《重慶大學學報(社會科學版)》2020 年第3 期,第1-10 頁。
此外,在免除駕駛人的注意義務狀態下,由于自動駕駛系統的技術缺陷而發生致人重傷、死亡或者其他導致公私財產遭受重大損失的,不應歸責于駕駛人,同時應限制追究生產者、銷售者的過失責任。對此,日本有學者提倡應追究程序開發者(或者生產者)業務上過失致死傷罪,但此舉是否恰當令人質疑。〔43〕同前注〔10〕 ,中山幸二文。業務上過失致死傷罪是基于行為人的過失是業務上的過失時所規定的過失傷害罪及過失致死罪的加重類型,類似于我國《刑法》第233 條過失致人死亡罪與第235 條過失致人重傷罪的加重結果犯。關于業務上的過失受到比通常的過失更重的處罰理由,日本刑法理論通說與判例認為是業務者被科以不同于通常人的特別高度的注意義務,違反注意義務時就要被歸以重的責任。〔44〕參見[日]大塚仁:《刑法概說(各論)》,馮軍譯,中國人民大學出版社2003 年版,第65 頁。但是,對于同一行為所應該要求的注意義務,無論是業務者還是非業務者,應該是均等的。對生產者而言,生產制造自動駕駛機動車與非自動化駕駛機動車的業務上的義務是同一的。因此,不能認定生產者、銷售者在生產、銷售自動駕駛系統汽車的注意義務要高于人工駕駛汽車。
總之,在自動駕駛車輛造成法益侵害結果時,應當可以適用被允許的危險理論化解刑事責任歸責。〔45〕參見[德]埃里克·希爾根多夫:《自動系統、人工智能和機器人—— 一個刑法角度的定位》,黃笑巖譯,載《法治現代化研究》2019 年第1 期,第85-94 頁。如果禁止一切危險,社會就會停滯。根據被允許的危險理論,以對社會發展的整體利益優先于個人的生命、身體保護等私法益的價值觀為基礎,在生產者、銷售者遵循行業標準、國家標準制造、銷售的自動駕駛汽車在通常就不會發生危險結果的條件下,允許自動駕駛技術投入交通領域。但是,對于被允許的危險理論也存在質疑的聲音,認為在造成第三者的生命安全法益侵害的情況,生產者及程序開發者通過改寫程序,能夠回避危害結果的發生。〔46〕參見畐川雅滿:「アルミン·エングレーダー「自動運転自動車とジレマンマ狀況の克服」」,千葉大學『法學論集』32 巻1·2號(2017 年)184 頁參照。對此,筆者認為,應嚴格認定結果預見可能性、結果預見義務,結果回避可能性、結果回避義務與危害結果之間的因果關系。生產者、銷售者對于自動駕駛汽車出現不能繼續使用的技術缺陷具有預見可能性,只要采取召回該產品或警示缺陷及危險性等結果回避措施,生產者、銷售者就不成立過失犯罪。以履行結果回避義務為必要,但是否能夠防止結果的發生在所不論。當該事故是基于生產者的義務違反才能實現對危險性的評價,因此需要證明注意義務違反和事故發生之間的因果關系。〔47〕同前注〔39〕,中川由賀文。在民法上,以產品的缺陷為要件,對生產者科以嚴格責任。與民事產品責任不同,對于生產者、銷售者的刑事責任認定,應貫徹過失責任。
2.對于“自動駕駛車難題”自動駕駛程序選擇的正當化
假設一輛自動駕駛車在完全或者高度自動駕駛模式下在海岸公路行駛,反方向迎來一輛出租車。在該路段不限方向、同時只能通過一輛車且來不及減速的情況下,自動駕駛車繼續直線行駛會與出租車相撞,乘坐自動駕駛車的老人死亡(老人坐在副駕駛位置),出租車司機受傷,沿路的步行者安全。自動駕駛車向右改變方向,步行者三人會死亡,老人安全,出租車司機安全。自動駕駛車向左改變方向會掉進大海,導致老人死亡,但是步行者與出租車司機安全。〔48〕小林正啓:「自動運転車の実現に向けた法制度上の課題」情報管理60 巻4 號(2017 年)243 頁參照。這是由典型的倫理、哲學思考問題——電車難題變換而來的“自動駕駛車難題”。在完全或高度自動駕駛狀態下,駕駛人甚至不需盡到周圍環境的監控義務,以及接管任何緊急狀態的駕駛行為,因此,理應認為駕駛人不是自動駕駛汽車的操作主體,其自動駕駛系統才是“駕駛人”。人類駕駛車輛時,對于“電車難題”所作出的選擇,更多是基于人的本能判斷。但是,自動駕駛模式下,車輛所安裝的自動駕駛系統在編程時已經進行了判斷,在實際發生困境時只是自動執行程序。即,“自動駕駛車難題”的判斷,其實質是生產者預先設定的判斷。在刑法中,無論自動駕駛車選擇左、右、前方向都導致死亡結果時,轉變方向行為本身已經充分符合故意殺人的外觀條件。因而在該案例中,所要探討的是自動駕駛車優先保全車內乘車人的安全是否阻卻生產者的責任問題。
自動駕駛系統將危險轉嫁于出租車司機或步行者,不適用緊急避險理論而阻卻違法。緊急避險是為了使國家、公共利益、本人或者他人的人身、財產和其他權利免受正在發生的危險,不得已采取緊急避險行為,且保全利益大于或等同于侵害利益,在合理避險限度內,不負刑事責任。生產者在車輛投入使用之前,已經設定對“自動駕駛車難題”的轉向判斷,其與私拉電網防衛小偷的例子具有一定類似性,避險行為的時間上具有提前性,不符合迫在眉睫的法益侵害現實緊迫性。從法益均衡性上看,沖突法益是出租車司機、步行者三人與乘車老人生命安全。任何法益都可能因為緊急避險的介入而作出犧牲,但是在犧牲生命利益而保全生命利益的場合,即生命對生命的情況是例外的。“因為,人的生命價值是不存在差別的。在數人的生命共同面臨危險,以及以犧牲一人來挽救多人,無不同樣如此。”〔49〕[德]漢斯·海因里希·耶賽克、托馬斯·魏根特:《德國刑法教科書》,徐久生譯,中國法制出版社2001 年版,第435 頁。正如《德國刑法典》第34 條的規定,“許多條生命并不比一條生命更貴重”。因而,引用緊急避險理論排除違法不具合理性,并且恰能夠反向證明生產者在編程時,意識到“自動駕駛車難題”具有發生致人重傷死亡結果的可能,并且對事故結果持以積極的或放任的態度。據此觀點,生產者對于事故結果具有過失甚至間接故意。
但是,規范責任論認為,對行為人沒有期待可能性的時候,即便行為人具有故意、過失,也不能對行為人進行譴責。作為生產者,在其能夠預測到的事故范圍內,將自動駕駛車內乘車人員的生命安全優先于車外人員及自動駕駛車本身的安全作為第一順位是合理的。對于乘車人與車外人員的生命安全法益產生沖突的場合,生產者雖可以事先通過改寫程序很容易回避結果的發生,但是,法律并不能期待生產者為保全車外人員的人身安全而作出犧牲乘車人生命的判斷。生產者對于乘車人而言,具有業務上保護乘車人生命安全的特別義務。在刑法中,雖不允許業務上具有特別義務的人為保全我方利益而犧牲他方利益,但是,這并不否認業務上的特別義務是為保全我方利益的情況。“不可否認,同以法益衡量內容的違法性的判斷標準相比,期待可能性的標準更加不明確。但是,為活用期待可能性的宗旨,以個人責任為前提,從行為人標準的角度來把握。”〔50〕黎宏:《日本刑法精義》,法律出版社2008 年版,第227 頁。因此,車輛生產者對于“自動駕駛車難題”應遵循的安全順位問題,應以車內乘車人員的生命安全為第一順位,第二順位應是車外人員的生命安全,第三順位再考慮車輛安全。〔51〕同前注〔48〕,小林正啓文。
(五)駕駛人與自動駕駛系統過失競合的責任認定
2018 年2 月27 日,特斯拉公司承認,中國首例自動駕駛事故發生時,特斯拉處于“定速”狀態下行駛,遇到前方的道路清掃車,特斯拉并未有剎車和減速的跡象。〔52〕參見《確認了!全球首例“自動駕駛”致死車禍發生在中國!》,http://www.xinhuanet.com/auto/2018-03/05/c_1122486792.htm, 2020 年7 月1 日訪問。而早在2016 年12 月,荷蘭一輛Model X 特斯拉汽車探測出前方即將發生的事故,“前方碰撞預警”(FCW)系統即刻發出警報,特斯拉自動啟動緊急制動系統,從而避免了一場事故的發生。〔53〕參見李明:《特拉斯Model X 最新自動駕駛成功救命!千鈞一發》,http://news.mydrivers.com/1/513/513735.htm, 2020 年7月1 日訪問。由此,從技術角度而講,現階段的特斯拉Autopilot 雷達功能不僅能準確地探測到前方的障礙物,甚至可以預測出前方的碰撞事故,并采取緊急制動從而防止事故的發生。故就中國首例自動駕駛事故案件而言,究其原因應是自動駕駛系統與駕駛人的過失競合。首先,特斯拉未能及時啟用緊急制動或采取有效避讓是導致事故的原因之一。當前特斯拉汽車所采用的Autopilot 輔助駕駛技術屬于SAE2 級自動駕駛系統,為駕駛部分自動化,在特定的駕駛模式下由一個或多個智能輔助駕駛系統根據駕駛環境信息控制轉向和加減速,并由駕駛人監控、接管緊急駕駛任務。而駕駛人高某在發生事故前一分鐘內狀態輕松,在前方障礙出現了近20秒,也并未采取任何行動避開道路清掃車,因此駕駛人至少存在過失,其為導致事故的原因之二。
類似上述情形,筆者認為,對于SAE 級別3 的自動駕駛汽車,原則上責任歸屬于系統。只有在自動駕駛系統要求駕駛人介入的場合,駕駛人才應做出接管車輛駕駛行為。盡管在自動駕駛過程中自動駕駛系統發出要求,但駕駛人未作出對應或作出不當對應的情況,不能免除駕駛人的責任。原則上,系統未作出由駕駛人介入操作的要求,導致事故發生的情況是系統的責任,此時應當允許駕駛人信賴系統,肯定信賴原則的適用。例如,雖然自動駕駛系統沒有感應到道路交通臨時設置了管制警示,但由于駕駛系統沒有要求駕駛員接管操作,致使駕駛員誤以為駕駛系統已經有了相應的反應,因而沒有及時接管車輛最終引發事故。在這種情況下,駕駛員不應被認定為構成交通肇事罪。因為在自動駕駛的情況下,不能過于苛求駕駛員時刻保持監測駕駛環境和行駛的狀態,而應允許其對自動駕駛系統保留合理信賴。〔54〕參見黃波:《自動駕駛汽車交通肇事的刑法應對》,載《天府新論》2018 年第4 期,第115-117 頁。原則上,只要自動駕駛系統沒有要求駕駛員接管駕駛,即使駕駛人員已經預見到前方有危險但能夠相信駕駛系統可以避免,故不能認定其存在過失,否則自動駕駛將失去存在的意義。
但是,附條件自動駕駛系統原則上應配有駕駛人,系統未作出接管駕駛警示而致使事故發生,也不是完全可以排除駕駛員承擔過失甚至故意責任的可能性。在這種情況下,系統和駕駛人不是共同過失,而是競合的關系。換言之,對于系統未作出接管駕駛警示而致使事故發生,應仔細考察駕駛人過失的有無。如對患者注射攜帶HIV 的血液制劑,引發艾滋病導致患者死亡的場合,存在(1)投入該血液制劑的醫生的過失;(2)制造、販賣該血液制劑,并且發現該問題并未召回該血液制劑的制藥公司的過失;(3)許可該血液制劑的制造、販賣,并且發現問題后并未指示召回該血液制劑的政府官員過失的競合。〔55〕參見岡部雅人:「自動運転車による事故と刑事責任——日本の刑法學の視點から」愛媛法學會雜誌43 巻3·4 號(2017 年)10 頁參照。在自動駕駛事故中,當駕駛員發現自動駕駛系統明顯不正常,即將撞上行人或其他車輛,而自己能夠命令自動駕駛系統立即停車,卻故意不下命令或由于過于自信過失而未下命令的,也應當承擔刑事責任。〔56〕同前注〔37〕,周銘川文。該情形與日本“藥害艾滋病事件”〔57〕藥害艾滋病事件是指80 年代初日本在臨床治療血友病過程中,作為止血劑大量使用了從美國引進的非加熱濃縮血液制劑,結果造成許多人感染艾滋病病毒甚至死亡的事件。第一審為大阪地裁平成12·2·24。上訴審為大阪高裁平成14·8·21。一樣,駕駛人具有與投入血液制劑的醫生相同的地位,自動駕駛汽車的生產者與制藥公司的地位相同,都形成過失的競合,承擔相應過失責任。
五、結語
人工智能不斷模糊現實世界和數字空間的界限,延伸出復雜的倫理與法律問題。正如吉登斯所說:“為了避免科技風險造成嚴重而不可逆轉的破壞,人們面對的不只是科技的外部影響,也包括規制科技發展的邏輯。”〔58〕參見 [英]安東尼·吉登斯:《現代性的后果》,田禾譯,譯林出版社2000 年版,第149 頁。自動駕駛汽車的普遍化、市場化,凸顯出法律規制應對技術缺陷的不足,尤其是發展到完全自動駕駛階段,交通事故的刑事責任應如何追究等,涉及到人工智能實體是否能夠獨立作為刑事主體及責任類型等問題,這又關乎刑法、法律甚至牽涉到道德倫理問題。
自動駕駛模式引發的交通事故需結合自動駕駛的程序原理和級別設定考量刑事歸責,駕駛人對于自動駕駛系統的參與程度不同,駕駛人與系統的責任分擔也不同。在限制條件之內的高度自動駕駛模式與完全自動駕駛模式中,允許駕駛人全面信賴自動駕駛系統;除此之外的駕駛模式中,只允許駕駛人部分信賴系統;在過度信賴系統的場合,應追究駕駛人的過失責任。為平衡技術發展與風險承擔之間的緊張關系,應注重刑法領域中信賴原則的適用,同時靈活運用民事責任分攤風險。在具體的刑事歸責類型方面,可以分為:非法利用自動駕駛汽車為犯罪工具者的故意責任、駕駛人的過失責任、系統故障導致的生產銷售者的產品責任及駕駛人與系統存在過失競合的責任等幾種情況。對于自動駕駛模式造成交通肇事后逃逸的行為,駕駛人并非實行行為人,不存在構成加重結果的可能。為避免交通事故結果的擴大,應擴張適用不報、謊報安全事故罪。對于生產者、銷售者所可能承擔的產品責任,以當時科學技術水平能夠預見到的產品缺陷為限。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32