自適應被抓取目標形狀的柔性指端夾持器設計
2020-09-26 11:26:21胡禎劉吉成
機電信息 2020年23期
胡禎 劉吉成


摘要:研制了一種基于顆粒材料和氣動真空原理的柔性指端夾持器。該夾持器采用彈性膜包裹顆粒材料的方式形成柔性指端,并配以氣動裝置,對于任何外形復雜的目標抓取對象,柔性指端夾持器無需識別物體外形,能夠自適應改變指端形狀,包裹住目標對象,以實現完全貼合、非剛性接觸抓取目標。為了驗證柔性指端夾持器的應用效果,設計了系統測試實驗,實驗結果表明,該柔性指端夾持器的抓取速度、抓取成功率和穩定性等均能滿足使用需求。
關鍵詞:柔性指端夾持器;顆粒材料;自適應構件外形;非剛性接觸
0 引言
本文針對夾持器在抓取光學器件、芯片及外形尺寸復雜多變的構件時,需要夾持器具備自適應被抓取目標的外形尺寸,且非剛性接觸的功能,提出了一種基于顆粒材料和氣動真空原理的柔性指端夾持器,并通過實驗驗證了該夾持器應用的可行性以及柔性指端夾持器樣機的工作性能。
1 柔性指端夾持器工作原理
機械手要穩定地抓取目標物體,必須滿足抵消物體的重力、物體在手爪內不松動兩個基本條件。本文所提出的柔性指端夾持器與被抓取目標間采用摩擦點接觸,即力封閉,夾持器與目標物體之間的接觸力并沒有豎直向上的分力,即接觸力無法與目標物體的重力進行平衡,因此二者接觸時必然有摩擦力的存在,從而使目標物體的運動狀態保持不變,達到抓取目的。顆粒材料被包裹在柔性膜中,柔性指端設計為球形,能更好地貼合目標物體,可以自適應被抓取目標的結構外形。顆粒材料之間會相互擠壓,加上外部的膜具有很好的延展性與可塑性,因此柔性指端在接觸目標物體的時候能改變自身形狀,與目標物體有較大的表面接觸面積,更有效地實現表面貼合。
針對較大平板類目標物體的抓取問題,為了形成有效的正壓力,夾持器可以采用兩種方式實現目標物抓取:
(1)增大柔性指端的尺寸,使其完全覆蓋被抓取目標物體;
(2)將柔性指端的尺寸減小,采用多個柔性指端協同抓取的方式,使柔性指端與抓取目標結構外形自適應匹配,從而產生有效的抓取力。
2 柔性指端夾持器結構
2.1? ? 機械結構設計
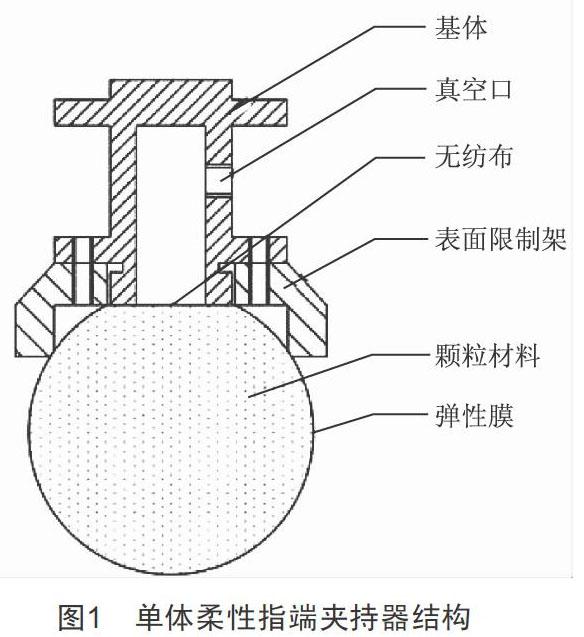
單體柔性指端夾持器主要由3部分組成,分別是基體、表面限制架和柔性組合體,如圖1所示。基體內部中空形成一個氣室,目的是使形成真空的過程有一個緩沖,不會損壞柔性組合體;表面限制架是為了限制柔性組合體的空間位移,使后者在一定范圍內發生形變,防止其因不可抗力而破損,同時也能使其更好地貼合目標抓取物;柔性組合體由顆粒材料和彈性膜組成,彈性膜將顆粒材料包裹在內,形成一個球狀物,更有利于抓取。
結合圖1所示的單體柔性指端夾持器結構,為了適應不同尺寸及外形結構更加復雜的被抓取目標,確保抓取的穩定性,本文提出了柔性指端多指夾持器設計方案,夾持器主要采用滑槽杠桿式手部機構,如圖2所示。
圖2中,將拉桿1向上提拉時,圓柱銷2可以在手指3的滑槽中移動,帶動手指3繞O1、O2回轉支點轉動,使工件4被夾緊。當拉桿1向下運動時,工件被松開。
這種機構由于具有結構簡單、動作靈活、手指張開角度大等特點,在工業機械手中的應用較為廣泛。驅動力計算公式:
式中:P為正壓力;a為O1到中心的水平距離;b為O1到抓取中心的距離;α為夾角;F為垂直力。
滑槽杠桿式手部機構使多個柔性指端相互聚攏,從而在接觸表面產生垂直于重力方向的正壓力。
2.2? ? 氣動回路設計
本文所使用的氣源為空氣壓縮機,能輸出壓縮空氣,但無法產生負壓。因此,氣路設計著眼于將正壓變成負壓。由流體力學可知,根據不可壓縮氣體的連續性方程可得:
式中:A1、A2為管道的截面面積(m2);v1、v2為氣流流速(m/s)。
由式(2)可知,截面面積增大,流速減小;截面面積減小,流速增大。對于水平管路,不可壓縮空氣的伯努里理想能量方程:
式中:P1、P2分別為截面A1、A2處的相應壓力(Pa);v1、v2分別為截面A1、A2處的相應流速(m/s);ρ為空氣密度(kg/m3)。
由式(2)、式(3)可知,流速增大,壓力降低。真空發生器的工作原理與文丘里管相同,是利用噴管高速噴射壓縮空氣,在噴管出口形成射流,產生卷吸流動狀態,在卷吸作用下,使得噴管出口周圍的空氣不斷被抽吸走,使吸附腔內的壓力降至大氣壓以下,形成一定真空度。
3 系統實驗測試結果
3.1? ? 柔性指端夾持器填充物及壓強選擇實驗
本文針對單體夾持器進行填充物選擇實驗,柔性膜形成直徑50 mm的球體。顆粒材料直接影響機械手的抓取能力,顆粒物太小,顆粒間的空隙就會變小,抽真空時,整個球狀物的體積變化不大,收緊程度不明顯,產生的正壓力較小,最大靜摩擦力也隨之變小,抓取效果不佳;顆粒物太大,顆粒間的空隙相對較大,柔性指端在貼合目標物體時可能會無法很好地覆蓋目標物體,接觸面積大大減小,貼合性就相對較差,這也會影響柔性指端的抓取能力。實驗選取30目、60目、120目、220目4種顆粒大小的玻璃微珠,玻璃微珠質硬、耐磨性好,不會隨實驗的進行而細化,以抓取水筆作為目標,測試顆粒效果。
筆者通過實驗結果可以發現,顆粒尺寸與抓取時間之間總體成線性關系,顆粒越大,抓取時間越短。30目顆粒的抓取過程最迅速,只需0.3 s;60目顆粒的平均用時為1.04 s,可得出結論:尺寸大于60目的顆粒材料都能實現快速抓取目標(此處不討論顆粒過大產生的負面影響,如貼合性差、覆蓋度低等)。
本文還討論了氣體壓強對抓取速度的影響。優化實驗采用抓取效果最好的30目的玻璃微珠,在0.1~0.6 MPa內對相同目標物體(螺絲刀)進行抓取測試,每個壓強數值下進行10次測試,取平均值。通過實驗可知,在壓強小于0.2 MPa范圍內,抓取時間與壓強總體成線性關系,且抓取時間隨壓強增大而減小,0.1 MPa用時15.24 s,而0.2 MPa用時只需1.02 s,降幅明顯;在壓強大于0.2 MPa范圍內,抓取時間幾乎不隨壓強變化而變化,在現有實驗條件下無法分辨其差別,0.3 MPa時的抓取速度已經達到0.52 s,完全滿足實際應用需求。
3.2? ? 柔性指端多指夾持器實驗
在上述實驗中,本文對填充物和氣體壓強進行了討論,得到了裝置設計的合理值。為了驗證柔性多指夾持器的工作性能,本文以大尺寸平板抓取為實驗對象,采用自行設計的柔性指端多指夾持器進行抓取實驗。實驗過程中利用推桿電機驅動夾持器,使手指夾緊,對柔性指端進行真空處理,使其產生垂直于重力方向的有效正壓力,進而抓取平板類物體。此次實驗測試了10次,都取得了成功。在抓取平板之后,還可以對平板進行翻轉、搖晃等操作,平板與柔性指端貼合度好。相比于使用吸盤吸附平板,夾持器抓取平板減少了建立真空的時間,減小了吸盤吸附的結構尺寸,無需考慮貼合性問題。采用柔性指端與滑槽杠桿式手部機構結合的方式進行目標物抓取,能完美抓取包括長條形、球形及不規則外形的目標物體。
4 結語
本文基于顆粒材料和氣動真空原理,設計了柔性指單體與多指端夾持器結構,并通過實驗驗證了該夾持器的工作性能。該夾持器能自適應各種不同結構、易碎及不可直接進行剛性接觸的抓取目標,無需識別物體外形就能直接抓取,操作簡單、高效。
實驗表明,在填充物方面,建議采用尺寸為30~60目的顆粒材料,氣源輸出的氣體壓強控制在0.3 MPa以上,以產生相應的負壓,保證較高的抓取速度、抓取成功率和穩定性。
柔性指端夾持器樣機實驗表明,此夾持器對長條形物體、杯狀物、平板類物體等復雜外形結構的物體展現出了極好的抓取性能,在貼合程度、抓取速度、抓取穩定性等方面都體現出了明顯優勢。
[參考文獻]
[1] 劉培炎,吳松,付榮華,等.柔性機械手抓取能力影響因素的研究[J].機械制造,2017(2):6-9.
收稿日期:2020-08-04
作者簡介:胡禎(1978—),男,上海人,工程師,研究方向:機械機構設計、幾何量計量校準及檢測方法。
