醫院智能配送機器人控制系統設計
2020-09-26 11:26:21王淼賴志林李睿李良源陳會斌
機電信息 2020年23期
王淼 賴志林 李睿 李良源 陳會斌
摘要:根據國務院辦公廳發布的《深化醫藥衛生體制改革2019年重點工作任務》中關于“互聯網+醫療健康”的指導精神,從自動化物流運輸方面入手,構建醫院智慧物流控制體系。首先對醫院智慧物流的必要性、功能設計、性能設計進行了闡述,隨后詳細介紹了該系統的主要功能模塊與硬件結構,同時對系統軟件控制策略與流程進行詳細的分析與設計,并以廣東省一家三甲醫院為例,介紹了醫院智能配送機器人在實際運行中取得的良好效果。該智能控制系統對實現醫院智慧物流具有重要的實際意義。
關鍵詞:機器人;配送;控制系統;物流;智慧醫院;人工智能
0 引言
隨著醫院信息化管理的不斷深入以及醫療設備智能化技術的不斷發展,人們對大型綜合醫院的物流系統提出了新的要求。目前,傳統醫院物資采用人工配送方式,占用醫護人員大量的時間與精力,配送效率低、成本高、不可追溯且流程不可控,人員流與物資流使用相同通道,增加了交叉感染的風險。因此,擁有一套以智能配送機器人為核心的自動化物流運輸系統已成為醫院智能化升級的必要因素,更是現代化醫院的標志之一[1]。
1 設計要求
1.1? ? 系統功能設計要求
醫院智能配送機器人控制系統需要滿足醫院內各種復雜環境的要求,實現各個科室物資的大范圍、跨樓層的運輸,故智能配送機器人應具備定位導航、自主避障、自動配送、自動續航、智能交互、智能調度等功能。
1.2? ? 系統性能設計要求
(1)定位性能:誤差在10 mm;(2)轉向性能:誤差在0.5°以內;(3)安全性:系統最主要的就是安全,包括數據安全以及設備自身的安全防護;(4)可靠性:系統可靠性是系統長期穩定運行的基石,只有可靠的系統才能發揮有效的作用[2];(5)可拓展性:系統可無縫對接多種接口,如SPD、HERP、HIS等。
2 系統總體設計
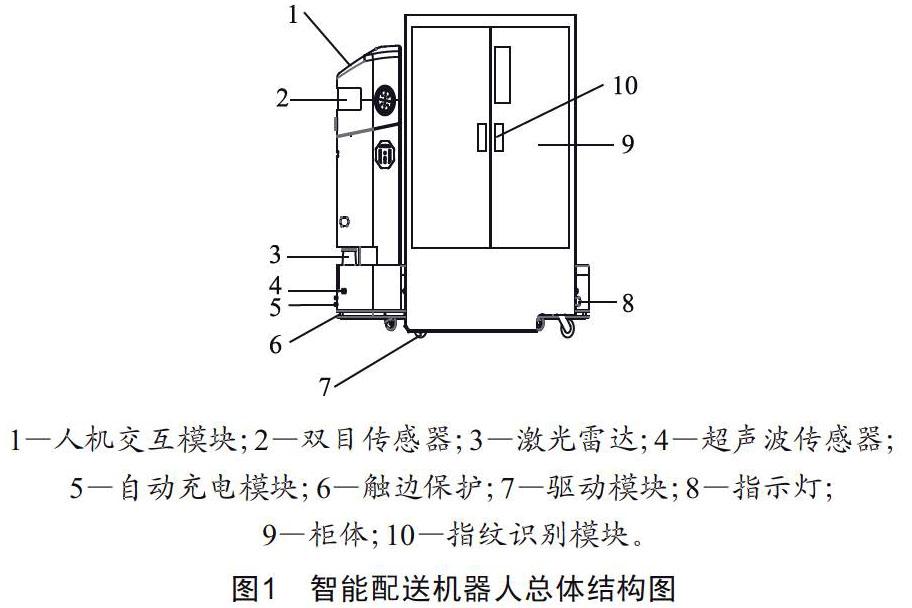
醫院智能配送機器人控制系統包含7大模塊,各個模塊功能如下:
(1)電源模塊:其是整個系統動力的來源,為各個模塊提供能量[3]。在設計過程中,由于各個模塊對電源電壓的要求不一致,因此需將電源分為不同的等級對系統供電,從而滿足不同模塊的需求。
(2)主控模塊:其是控制系統的“大腦”,是控制系統最為核心的部分,主要對各個模塊起到協調作用[4]。主控模塊可接收各個模塊反饋的信息并進行綜合、運算、分析、處理,再用于對相關模塊的控制。
(3)運動控制模塊:MCU發送控制指令,機器人在接收目的指令后運動到指定位置,其中需要進行直線行走、轉彎等。在機器人運動過程結合智能算法,對電機進行速度和方向等控制,以提高機器人運動的穩定性與精確性。
(4)避障模塊:機器人行進過程中用于檢測障礙物,防止碰撞損壞機器人。本文設計的機器人增加了超聲傳感器實時獲取障礙物的位置,遇到障礙物后做出相應規避動作,進入停止等待狀態。
(5)導航及定位模塊:機器人在配送環境中用于導航與定位。其控制系統通過激光雷達獲得自身在環境中的位置信息,為機器人配送提供保障。
(6)無線通信模塊:其是機器人與后臺調度管理中心連接的紐帶,用于數據的傳輸,接收后臺調度管理中心的任務指令以及反饋機器人位置、狀態、電量、工作情況等信息。
(7)人機交互模塊:其主要功能是實現可視化操作,提高配送機器人的操作簡便性,便于操作人員隨時觀測機器人的運行狀態;通過該模塊可以方便、快捷地對機器人的參數進行修改、設定,以保證在不同工況下實現機器人配送作業最優化。
3 硬件設計
智能配送機器人總體結構如圖1所示。
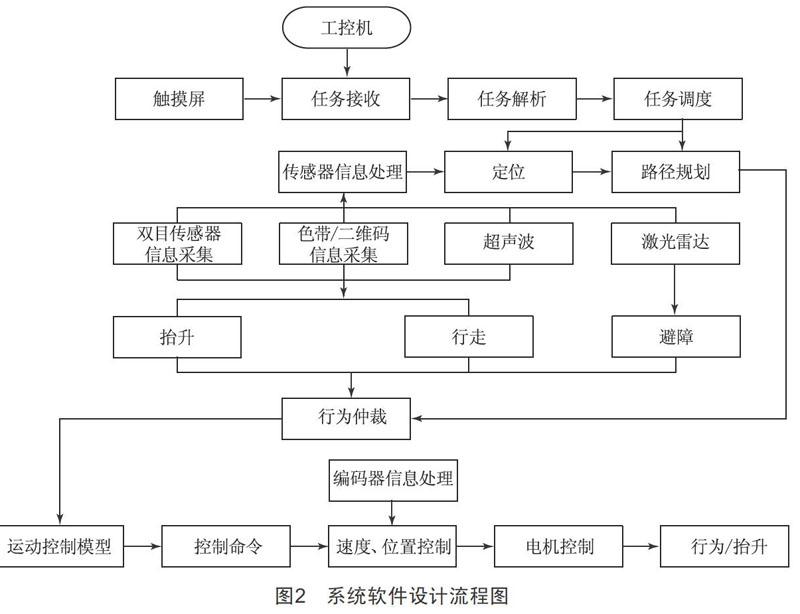
4 軟件設計
系統軟件設計流程如圖2所示。具體步驟為:由后臺調度系統或觸摸屏給機器人下發任務,機器人接收、解析任務后,通過激光雷達、雙目傳感器、二維碼掃描器、超聲波等傳感器信息處理與數據融合,以及對運動控制模型的分析、編碼器信息處理和電機速度與位置的閉環控制,實現機器人的配送功能。
系統軟件采用模塊化程序結構,將整個嵌入式軟件系統分為初始化模塊、中斷模塊、數據采集模塊、運動控制模塊、無線通信模塊。其中,初始化模塊主要包含對系統時鐘的初始化、I/O端口功能的初始化、系統定時器的初始化、串口通信的初始化、AD數模轉換的初始化。中斷模塊主要進行標志位的設置,保證程序時序邏輯正常。數據采集模塊主要采集和處理各個傳感器中的數據,包含編碼器脈沖數據的反饋與處理,可獲取機器人行駛速度信息;采集二維碼坐標信息,可獲取機器人當前位置信息;采集電池電壓信息,可獲取機器人當前電量信息。運動控制模塊主要實現配送機器人行駛和背負重物兩種功能的控制,包括對驅動電機的速度控制和方向控制以及對電動桿的速度控制和位置控制。
5 應用分析
以廣東省一家三甲醫院為例,智能配送機器人主要服務于中心藥房和消毒供應中心,其可自主避障、自主充電、自動呼梯和乘梯、自動開關門,最終實現跨樓層運輸任務。該機器人單次最大運輸量可達300 kg,全天候24 h待命,平均每臺機器人的配送能力相當于3~5人。該醫院在引入智能配送機器人代替傳統人工進行配送后,一方面大大提升了醫院物流的運輸效率,另一方面釋放了醫護人員寶貴的工作時間,提高了整院醫療服務質量。
6 結語
醫院智能配送機器人不僅解決了醫院現階段人工配送存在的痛點問題,更是通過智能配送機器人系統的引入,實現了傳統醫院模式與新興先進技術的交叉融合,不僅在行業內起到了示范作用,更為以后搭建智慧物流系統甚至是建設智慧醫院提供了新的思路與途徑,推動了醫療場景物流智能化及智慧醫院建設的進一步發展。
[參考文獻]
[1] 夏琴曄,楊宜民.基于biSCAN和SVM的機器人目標識別新算法研究[J].廣東工業大學學報,2013,30(4):65-69.
[2] 肖強.地面無人車輛越野環境多要素合成可通行區域檢測[D].北京:北京理工大學,2015.
[3] 孫銀健.基于模型預測控制的無人駕駛車輛軌跡跟蹤控制算法研究[D].北京:北京理工大學,2015.
[4] 仵桂學,楊宜民,黃東運,等.基于機器視覺的快速切割路徑生成系統[J].自動化與信息工程,2015(3):12-15.
收稿日期:2020-07-27
作者簡介:王淼(1989—),男,湖南人,工程碩士,助理工程師,研究方向:智能控制科學與技術(機器視覺、傳感器信息融合)。
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
物流技術與應用(2020年11期)2020-03-11 03:11:36
商界(2019年12期)2019-01-03 06:59:05
汽車觀察(2018年12期)2018-12-26 01:05:44
IT經理世界(2018年20期)2018-10-24 02:38:24
消費導刊(2018年8期)2018-05-25 13:20:16
小康(2017年16期)2017-06-07 09:00:59
南風窗(2016年19期)2016-09-21 16:51:29
南風窗(2016年19期)2016-09-21 04:56:22
現代企業(2015年2期)2015-02-28 18:45:09
