車載雷達天線同步舉升系統仿真研究
2020-10-12 14:04:30凌帥
汽車世界·車輛工程技術(中) 2020年5期
凌帥
摘 要:車載雷達作為重要的軍用設備,其自身的適用性和耐用性十分重要。由此,本文就以車載雷達天線同步舉升系統仿真研究為題進行研究,希望對我國車載雷達的發展提供一定的幫助。
關鍵詞:車載雷達;舉升系統;交叉耦合控制
隨著現代戰爭的升級和國防要求的提高,傳統的雷達已經難以滿足日益激烈的戰爭要求,具備高機動性和高作戰性能的雷達才是現代戰爭中必備的利器。車載雷達本身的高機動性和不俗的跟蹤識別能力,就可以滿足現階段軍事和國防需求。
現階段,我國的車載雷達已經達到了較高的技術水平,但是在天線舉升系統上,還是存在一定的缺陷。其一就是同步控制這一難題的阻礙,另外就是裝置本身的強度不足,容易發生形變等情況,這些都會影響到我國車載雷達的性能。
1 車載雷達天線同步舉升系統的基本原理
1.1 車載雷達液壓系統工作要求
軍用車載雷達相對普通車載雷達在性能和耐用性上要嚴格不少,具體來說軍用車載雷達需要滿足以下要求。首先,車載雷達液壓系統的需要滿足每分鐘14升的額定流量,所用的液壓油最下不得低于NAS7級,液壓油在工作過程中需低于80℃。其次,舉升油缸的運動速度需要大于每秒1.5cm,滿足10Mpa的額定工作壓力,油缸的舉升力還要大于15千牛。最后,車載雷達在進行駕撤動作的過程中,需要在3分鐘內完成,駕撤的過程中還要保障過程的平穩和較小的誤差。此外,由于車載雷達需要長期的野外作業,所以其本身還要具備良好的抗腐蝕性和防水、耐熱等功能。
1.2 車載雷達液壓系統組成及工作原理
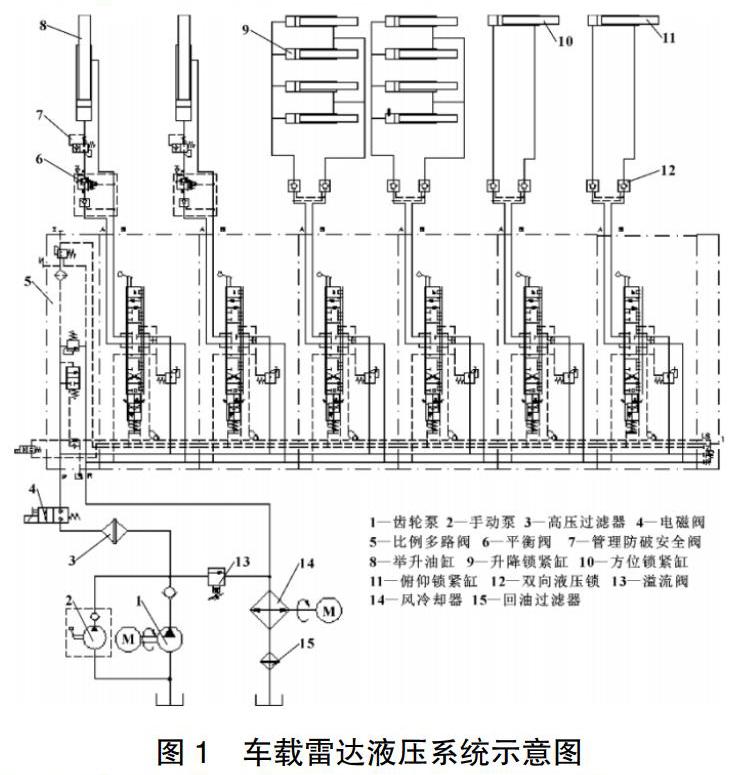
通過圖1我們可以看到,車載雷達液壓系統的組成主要是由液壓泵組、液壓缸、控制閥組等諸多部件組成的。其中液壓泵組是由兩個泵組成的,齒輪泵負責日常工作,手動泵起到緊急工作的作用。液壓系統中液壓缸采用了口徑較大的缸體,能夠為液壓系統提供較大的舉升力,并且在雷達天線架設完畢后,液壓系統中的鎖緊缸還會鎖死,以保障雷達天線的工作平穩。最后,通過圖片我們可以看到,該套系統中存在較多的控制閥,這些控制閥都可以實現獨特的作用,例如平衡閥可以實現穩定雷達天線的下降情況;管路防破閥可以起到防止油管破裂的作用,減少事故發生的作用。
2 車載雷達天線同步舉升系統分析
2.1 建立相關數學模型
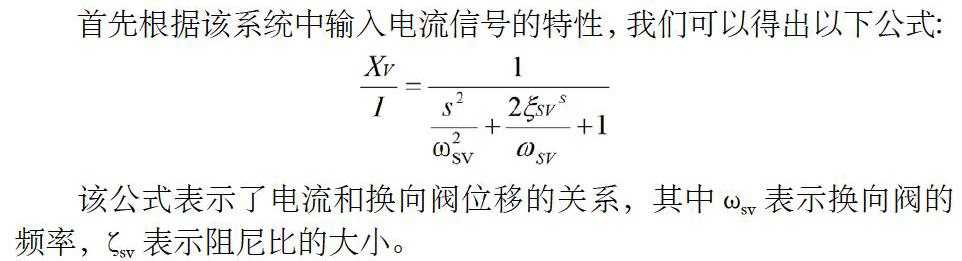
首先根據該系統中輸入電流信號的特性,我們可以得出以下公式:
該公式表示了電流和換向閥位移的關系,其中ωsv表示換向閥的頻率,ζsv表示阻尼比的大小。
2.1.1 建立閥控非對稱缸數學模型
首先我們已知液壓系統比例閥的線性化流量方程為:
我們將比例閥的流量方程拉普拉斯變換后可以得到以下公式:
上述公式中,Kq表示為比例閥的流量增益,Kc則表示為比例閥的壓力系數。此外,我們綜合考慮了液壓缸的工作過程,認識到有可能因為各種原因導致流量的不對等,故而對負載流量進行了定義,定義得到的公式為:
上述公式中q1、q2分別表示液壓缸進油腔的流量,以及回油腔流出的流量。其中Ap表示為液壓缸的活塞面積;xp表示活塞的位移;Cip和Cep分別表示缸內和缸外的泄漏系數;βe表示為彈性模量;V1和V2分別表示進油和回油的容積。
上述的兩個公式,表示液壓缸的容積公式,該公式中V01和V02分別代表進油腔和出油腔的原始容積。
通過上述公式我們可以得到下述的方程式:
上述方程為流量延續性方程,該方程中Ctp表示總泄漏的系數。通過對該方程的拉普拉斯變換,我們可以得到下述方程:
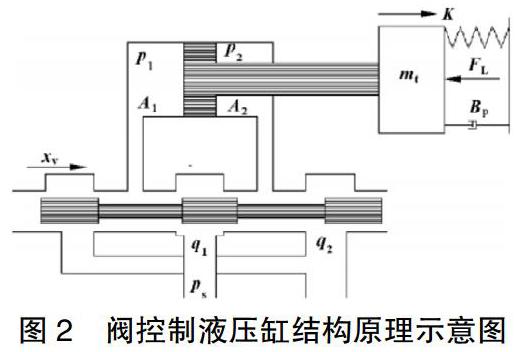
上述方程表示液壓缸輸出和負載力的平衡方程。該方程中mt表示活塞的總質量;Bp表示為粘性的阻尼系數;K表示為剛度系數;FL表示為負載力。通過對該公式的拉普拉斯變換,我們可以得到下述公式:
隨后我們對上述該公式進行聯合,可以得到液壓缸的活塞桿產生的總輸出位移:
上述公式中,ωh表示為液壓的固有頻率;ζh表示為液壓的阻尼比系數。最終我們可以得到液壓系統的開環傳遞函數為:
通過上述公式,我們可以將液壓系統看做一個串聯系統,該系統有一個積分環節和一個振蕩環節組成,液壓系統的阻尼也會因為工作位置的變化而出現相應的變動。
2.2 控制策略分析
通過上述公式分析和論證,我們可以看到,液壓同步閉環控制系統可以有多種控制方式,包括同等控制、主從控制和耦合控制。每一種控制方式都有自身的特點,同等控制主要可以在液壓系統的啟動和停止階段起到較好的作用;主從控制主要具有相較同等控制更好的精度,而耦合控制的精度則要更高于主從控制,所以,該系統選擇交叉耦合控制。
3 車載雷達仿真運行及結果分析
3.1 建立仿真模型
本文建立仿真模型,主要是利用AMESim和Simulink這兩款仿真模型工具建立,即利用AMESim建立二級液壓舉升油缸的模型,再利用Simulink建立控制部分的模型,隨后對這兩個進行聯合仿真,以保障建立的模型更符合現實情況,數據更加精準。
系統中核心部件和其具體參數設置如下所示:每分鐘1400轉的恒壓泵,排量為每轉11毫升;壓強為18的溢流閥;額定電流為40毫安的比例閥,比例閥的頻率為80赫茲,阻尼系數為0.8;二級舉升油缸一級和二級的活塞直徑分別為11cm和8cm,活塞桿的直徑分別為9.5cm和7cm,形成分別為8.7cm和9.1cm。該系統采用了交叉耦合的控制方式。
3.2 系統仿真模型的結果分析
具體的結果我們可以看圖3和圖4,其中圖3是不存在偏差情況下的升油缸位移曲線圖,其中升油缸兩邊的負載都是15千牛,最大的位移數值不超過的0.3cm,具有良好的同步性能。其中圖4表示在有偏差情況下的工作情況,其中升油缸的兩邊一個15千牛一個18千牛,總的偏差值不超過0.5cm。綜上所述,該系統可以滿足使用和設計需求。
4 結語
綜上所述,通過前文的論證和后續的分析,我們基本介紹了車載雷達的同步舉升系統和液壓系統,并根據模型和公式進行分析和探討,通過分析我們可以導出,該數據模型可以起到良好的模擬效果,并且證明了交叉耦合控制系統具備較高的精準度和實用性,可以滿足設計要求和實際需要。