車載雷達不落地模式快速標校方法
2020-10-13 10:48:18徐曉煜
火控雷達技術 2020年3期
關鍵詞:測量
徐曉煜
(1.中國電子科技集團公司第三十九研究所 西安 710065;2.陜西省天線與控制技術重點實驗室 西安 710065)
0 引言
為提高精密跟蹤測量雷達跟蹤測量數據的準確度,任務前一般要進行雷達標校,通過標定得到系統誤差修正系數,減少雷達測量時的系統誤差[1]。
對于車載式雷達來講,既要求能快速轉移,又要能快速拆裝,特別是能夠快速裝配,恢復天線精度,具備工作能力。由于車載雷達在野外執行任務時,不具備進行常規標校的條件,一套快速有效的應急標校方法,對于車載雷達不落地測量模式就顯得尤為重要。
本文以車載雷達不落地測量模式為例,采用雙GPS及載波相位差分技術進行零值誤差標定,以自動調平技術及自動化測試進行大盤不水平標定,獲取誤差修正參數,提高雷達系統測量精度。
1 零值誤差標定
1.1 角度零值標定
由于應急任務采用不落地的工作模式,不具備建立大地標校方位標的條件。因此,方位、俯仰角度零值即成為了標校工作中的重點。
一般我們會在具備零值標定的場地首先對雷達天線的方位、俯仰零值進行標定,并將其寫為編碼器角度。車載雷達到野外進行任務時,由于車體位置發生變化,會引起天線車航向角的變化。因此,方位零值標定的主要工作在于標定天線車體的航向角。俯仰零值的變化主要是由于大盤不水平引起的俯仰誤差,在進行大盤不水平的標定后,可以通過大盤不水平引起的俯仰誤差這個誤差項抵消。
本文采用雙GPS天線定位定向系統來確定天線車的航向角。系統由兩個GNSS接收單元、兩個測量天線和以嵌入式處理器為核心的計算處理單元(模塊)組成。通過兩個測量天線接收GNSS衛星信號,利用動基線載波相位差分技術,能精確解算出兩個GPS天線位置信息,兩者相對位置信息及兩天線相位中心連線與真北之間的夾角[2]。
我們選用市場上常規的GPS天線為測量型天線,配置標準的饋線與天線在阻抗、增益、放大倍數等方面與標配的天線有很好的匹配,GPS天線實物圖如圖1所示。
圖1 GPS天線實物圖
將兩個GPS天線分別旋擰到兩個磁基座上并分別固定擺放在測試載體的前進方向和后退方向上,盡可能的將其安置于測試載體的最高處以保證能夠接收到良好的GPS信號,同時要保證兩個GPS天線相位中心形成的連線與測試載體中心軸線方向一致或平行。安裝方式如圖2所示。
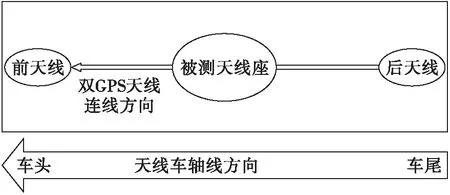
圖2 天線安裝示意圖
分別將兩根天線饋線連接到前后GPS天線和主機單元“ANT1”和“ANT2”接口上,并注意前、后天線的一致對應(“前天線”接口對應連接擺放在被測載體前進方向的天線,“后天線”接口對應連接擺放在被測載體后退方向的天線)。
本方案中兩個GPS天線的安裝基線為10 m,通過標校消除安裝基線與天線方位角的安裝誤差,定向精度能夠達到0.03°。如條件許可,盡量設計足夠長的安裝基線,可獲得更高的定向精度。
1.2 距離零值
雷達的距離零值時指發射信道和接收信道及距離跟蹤回路的時延所產生的零值,雷達實測距離應扣除上述總時延。距離零值的標校通常采用反射式或應答式方法。應答式標校距離零值,將應答機置于校準塔上進行[3]。雷達的距離零值R0為
R0=Rc-Rtra-Rr
(1)
其中,Rc為雷達天線自動跟蹤校準塔上應答機的轉發信號測出的距離值;Rtra用事先測定應答機和應答機至應答機天線饋線的時延值,計算出該時延對應的距離值;Rr用大地測量精確測定雷達天線中心至校準塔上應答機天線中心的距離。
本文采用RTK技術測定雷達天線三軸中心至牽引車綜合標校架上電標中心的距離,以此作為大地測量距離Rr,再利用雷達跟蹤綜合標校架上的信標,得到Rc和Rtra,即可解算得到雷達的距離零值R0。
RTK(Real Time Kinematic)是以載波相位觀測值進行實時動態相對定位的技術。其原理是將位于基準站上的GPS接收機觀測的衛星數據,通過數據通信鏈實時發送出去,而位于附近的移動站GPS接收機對衛星觀測的同時,也接收來自基準站的信號,通過對所收到的信號進行實時處理,給出移動站的三維坐標[4]。
本文利用RTK測量,配置兩臺GPS接收機,一臺固定安放在天線車上,作為基準站使用;另外一臺安裝在牽引車綜合標校架上,作為移動站進行點位測量。兩臺接收機之間進行數據通信鏈,實時將基準站上的觀測數據發送給移動站。車載站RTK測距原理如圖3所示。
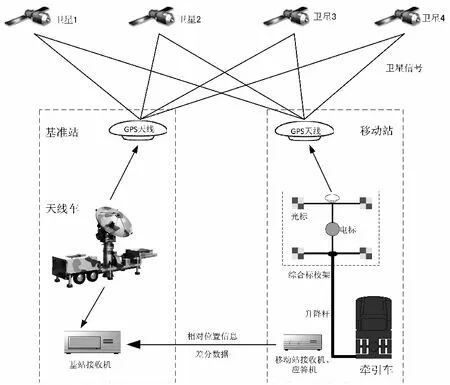
圖3 車載站RTK測距原理圖
利用嵌入在基準站接收機中的RTK軟件對接收到的數據進行實時處理,包括衛星信號、基準站及移動站的信號,可解算出兩觀測點的三維坐標。并根據兩觀測點的安裝位置分別到天線三軸中心與標校架電標中心位置之間的距離,即可解算得到雷達天線三軸中心到標校架電標中心的距離Rr,其解算結果的精度可達到厘米級。對于雷達米級的測距精度,可遠遠滿足使用要求。
2 軸系誤差標定
雷達天線軸系誤差主要包括天線座(大盤)不水平、俯仰軸與方位軸不正交、電軸與機械軸不重合等[5]。車載式雷達一般先在陣地進行了落地工作模式的標校工作,車載雷達轉場后,只需對有變化的誤差項進行標定。因此,車載式雷達不落地工作模式只需對天線座進行調平即可。
大盤不水平會引起雷達天線方位角和俯仰角誤差。天線座調平主要通過天線車自動調平單元將天線座調平到30″范圍內,然后利用安裝在天線座上的電子水平儀對天線大盤不水平進行測試。
2.1 天線座自動調平
為了適應快速展收的需要,將車體快速調平,天線座采用自動調平系統。通過電子水平儀采集誤差信號,經過數據處理和控制系統,通過動力源并經減速機構帶動支撐腿垂直伸縮運動,同時垂直方向的運動采用自鎖式螺旋運動,可將天線車快速穩定的在5 min以內調平至30″內。調平控制面板見圖4所示。
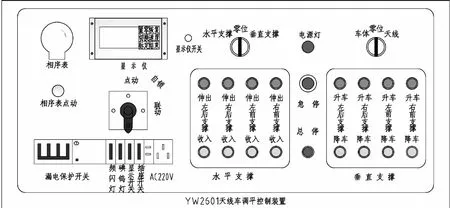
圖4 雷達天線掛車調平控制面板
自動調平顯示系統如圖5所示,天線車調平過程如下:
1)車體到位,調平控制系統加電準備工作;
2)控制支撐腿的垂直馬達,并帶動調平系統的絲杠運動,將車體撐離地面;
3)由車體電子水平儀給出水平信號,控制調平系統將車體自動調平至30″內;
4)四個支撐腿調平系統的機械鎖自動鎖定。
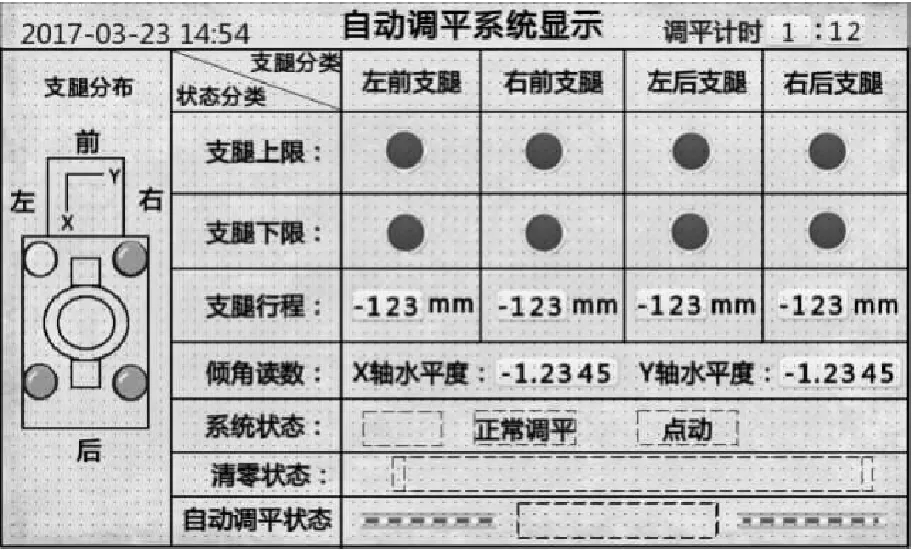
圖5 自動調平顯示系統
2.2 大盤不水平自動測試
完成車體調平后,對天線座大盤不水平進行測試,獲得誤差修正參數。大盤不水平標校可以通過安裝在天線座上的電子水平儀和ACU軟件控制進行自動測試。電子水平儀與ACU通過串口連接,通過ACU軟件自動控制天線轉動,讀取相應的數據,采用最小二乘法對測量數據進行擬合,得到天線座最大傾斜量θm和最大傾斜方向的方位角Am。
本車安裝的是一款全溫補高精度單軸傾角儀,其優良的溫度穩定性,能在-40~85℃的寬溫環境中保持較高的測量精度、更適合長期野外設備的監測與調平。傾角儀具有卓越的系統集成性,安裝簡單,抗外界電磁干擾能力強、承受沖擊震動能力強。傾角儀模型圖如圖6所示。
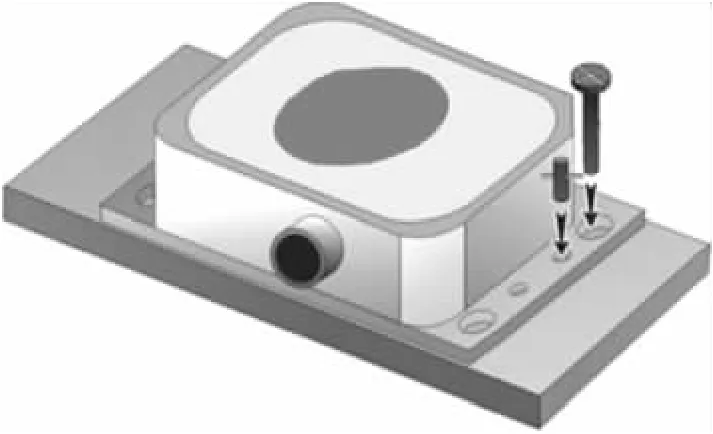
圖6 傾角儀模型圖
傾角儀利用地球重力原理,當傾角單元傾斜時,地球重力在相應的擺錘上會產生重力的分量,相應的電容量會變化。電容量通過系統內置高精度A/D差分轉換器,同時通過5階濾波算法,從而可以測量傳感器輸出相對于水平面的傾斜角度。輸出接口通過RS422接口與ACU相連接。
自動測試時通過ACU軟件自動測試流程,旋轉天線方位軸,天線每轉動約30°,利用ACU自動錄取電子水平儀讀數βi和相應的天線方位角度Ai,并進行數據處理。天線座大盤不水平自動測試流程如圖7所示。
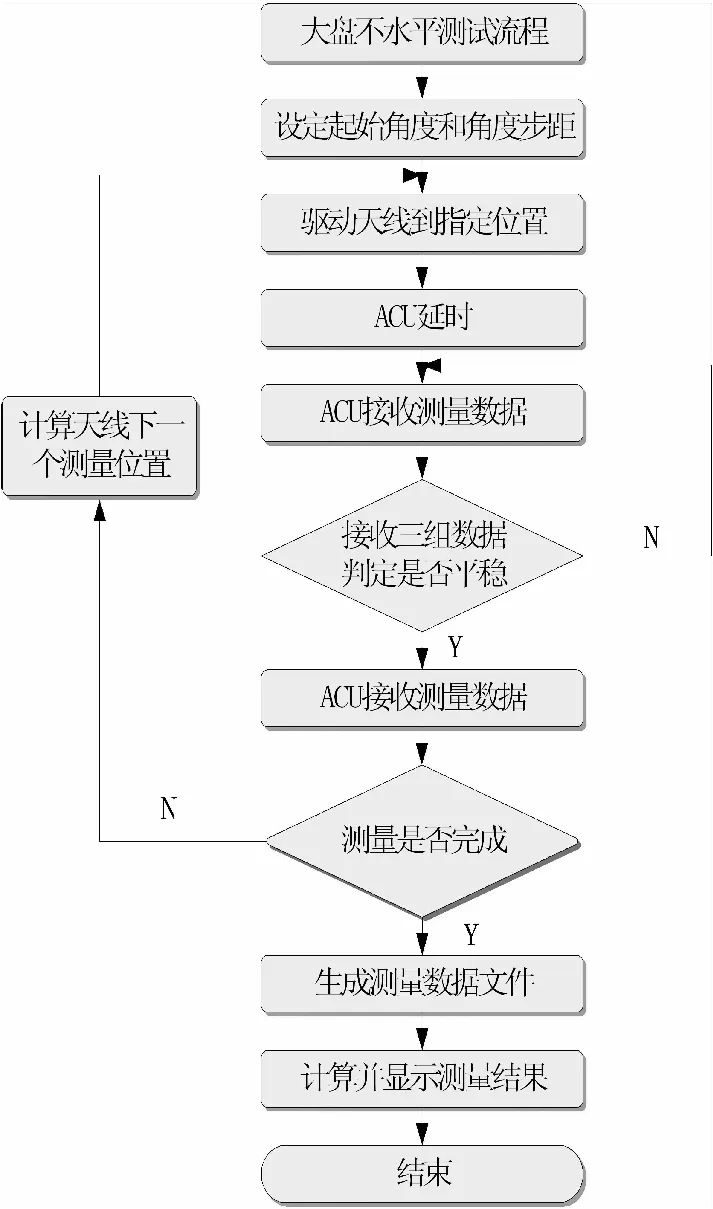
圖7 天線座大盤車不水平測試流程
按公式(2)~公式(4)計算方位轉盤最大傾斜量θm和最大傾斜方向的方位角Am。
1)計算水平儀讀數的平均值為
(2)
2)最大不水平角θM及其方位角AM為
(3)
(4)
經過以上測試及計算,即可得到天線座大盤不水平的測試結果。
3 誤差修正
經過以上標校過程,已完成雷達轉場架設可能引起的主要誤差修正項的處理。其它誤差修正項如定向靈敏度、光機偏差、光電偏差等項目,可利用雷達對牽引車綜合標校架進行檢查。根據以上標校參數,按照公式(5)、公式(6)進行數據修正即可。
A真值=A測量值-(C1-C3tanEcosAcosC4-
C3tanEsinAsinC4+C5tanE-C6secE)
(5)
E真值=E測量值-(C2+C3sinAcosC4-
C3cosAsinC4+C7cosE+C8tanE)
(6)
式(5)及式(6)中:
C1-方位角編碼器零值誤差;
C2-俯仰角編碼器零值誤差;
C3-方位軸傾斜誤差;
C4-方位軸傾斜方向;
C5-俯仰軸與方位軸的不正交誤差;
C6-電軸與俯仰軸的不正交誤差;
C7-天線重力下垂誤差;
C8-大氣折射修正后的殘差。
ACU軟件已具備數據修正功能,只需將誤差修正參數寫入數據修正模塊,即可完成測量數據的自動修正。
4 結束語
上述快速標校方法已在某車載雷達系統中成功應用,通過以上標校過程,得到雷達的誤差修正參數,使雷達系統快速具備參加試驗任務能力。經試驗驗證,車載雷達在不落地工作模式應急測量時,使用以上快速標校方法,可簡單快捷的獲取雷達天線的誤差修正參數,任務時進行數據修正,可獲得較高的跟蹤測量精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
