氣缸運動控制系統的設計與研究
2020-10-14 03:03:54王麗榮
視界觀·下半月 2020年2期
王麗榮
摘要:氣缸低速運動的直線型摩擦和干涉因子的靈敏度的高度等問題,motion控制系統的數學模型,確立適應基于神經網絡補償的pd控制算法的追蹤控制。現有的dc伺服控制系統的數學模型為基礎,根據汽缸的低速摩擦的數學模型,嵌入控制,汽缸的摩擦造成的現象,有效地抑制了自由泳汽缸的動向可以確保流暢的。同時,基于無線電的函數神經網絡,與傳統的PD控制算法結合的不確定非線性函數,實現高精度氣缸系統的跟蹤控制。Matlab仿真結果顯示,所建立的數學模型和控制算法可以有效地實現氣缸控制系統的位置跟蹤。
關鍵詞:氣缸控制系統;PD算法;位置跟蹤
近年來,由于可應用于氣缸的功能數量眾多,例如建模,控制器設計,車載測試和診斷,人工神經網絡己引起了廣泛關注。ANN是一種信息處理范例,受生物神經系統,功能以及信息處理的數學和物理方法的啟發。后者由許多相互并行工作的簡單處理單元組成,它們以某種方式連接,并取決于外部輸入信息計算機系統的動態響應狀態。它是一個簡單的模擬與特定的智能功能和快速處理能力的大腦執行。
一、氣缸控制系統結構
氣缸控制系統通常包含三層:輸入層,隱藏層和輸出層。它們每個由節點或神經元組成。而且,人工神經網絡可以解決分類問題和函數逼近。如果數據的設計滿足系統的所有動態要求,則ANN模型的應用程序開始正確運行。
二、氣缸運動控制系統數學模型
我們工作的實驗設置包括三個步驟。第一步,我們開發一種用于車輛電動機的發動機控制系統的模型。控制和管理單元基于神經模糊系統。之后,執行熱測試程序來測試己開發的ECU,這是我們程序的第二步。下一步是構建一個預測模型,該模型能夠為將來的時間間隔估計未知的燃油消耗值。將進一步詳細討論這些步驟。
1.機械運動部分數學模型
機械運動部分數學模型由驅動裝置數學模型、直流伺服電機數學模型、傳動設備數學模型和氣缸低速運動摩擦力數學模型組成。
絲杠滑臺作為伺服系統的機械傳動機構,主要作用是將直流伺服電機的旋轉運動轉化為直線運動。電機連接到螺紋桿的滑動臺,電機的轉速等于螺母旋轉速度的河流。絲綢條滑動導軌是指桿螺母在旋轉時行走的直線距離,因為桿連接到氣缸,直線距離是活塞的前進距離,表示為:
通常使用絲杠的傳動效率來表示系統的阻力矩和摩擦力矩:
由式(2)和式(3)可知,為了滿足對高精度,快速性和穩定性的要求,已經設計了基于PLC的工業應用中的電動缸控制方法。控制方法包括:自動上電并在加電時復位,快速準確的壓力加載,通過自學習生成控制參數以及返回到原點和壓力校準。快速準確的壓力加載過程包括位置預加載,壓力預加載,壓力粗加載和壓力精細加載。實驗結果表明,該選擇缸能滿足應用要求,壓力加載控制方法準確,快速,控制系統穩定可靠。它們將具有廣泛的工業應用潛力。
三、基于自適應神經網絡補償的PD控制算法
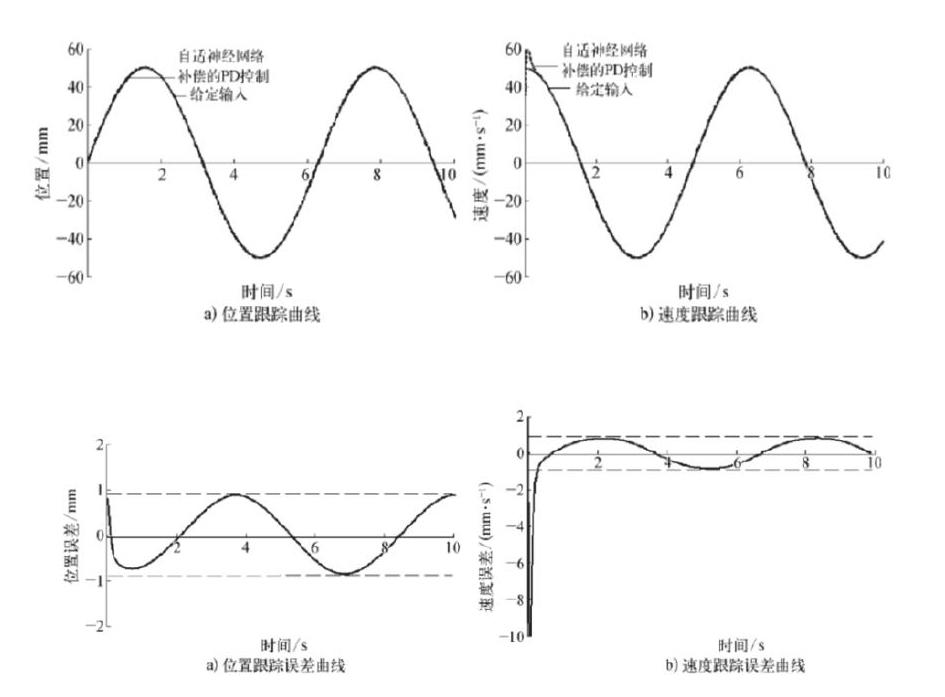
基于自適應神經網絡補償的PD控制算法對系統仿真的驗證,獲取高斯基函數的參數對神經網絡控制非常重要,參數選擇不當。高斯基函數無法實現有效的映射,從而導致RBF網絡無效。
仿真結果表明:整個反饋控制系統由一對相互連接的子系統組成,即閥控氣缸系統和負載感應控制系統。實驗表明,與傳統的氣門控制氣缸系統相比,負載傳感控制系統中基于滑模的位置跟蹤控制可以顯著減少泵的輸入能量,同時具有相同的位置跟蹤控制精度。
四、結論
在本文中,我們提出了基于NARX模型的神經網絡方法來進行氣缸運動控制系統的設計與研究。NARX的輸入是從氣缸熱測試的結果參數中提取的。再次在基于神經模糊系統的ECU上進行了熱測試。ECU進一步使用了ANN架構,該架構可以精確地管理發動機控制系統,并且輸出給出丁良好的學習和預測結果。通過更早地預測油耗,我們可以更準確地管理空燃比,通過廢氣再循環(EGR)系統進行的廢氣管理和凸輪正時,結果,改善了主機的特性,效率,燃料消耗,性能和污染物量。
參考文獻:
[1]郭立志.一種氣缸法蘭盤鎖緊裝置[J].機械工人,冷加工(09):48.
[2]范晉偉,劉益嘉,陳玲,etal.藥柱內窺鏡裝置氣缸及氣路系統的設計[J].制造技術與機床(6):179-181+184.
