基于機器視覺的火龍果自動分級系統設計
2020-10-17 03:13:46陳林琳姜大慶劉永華
農機化研究 2020年5期
關鍵詞:系統
陳林琳,姜大慶,黃 菊,劉永華
(1.南通科技職業學院,江蘇 南通 226007;2.江蘇農林職業技術學院,江蘇 句容 211121)
0 引言
我國作為農業大國,水果的產量占世界總產量的6%,然而水果的出口價格卻遠遠低于國外同類水果[1-2]。通過分析發現,我國水果產后處理比例和水平較低,導致出售的水果質量良莠不齊,加上產品包裝過于簡陋,水果產品很難進入高端市場。近年來,火龍果由于其具有美容保健的功效而在我國興起,但作為亞熱帶水果,在我國栽培時間比較短,種植面積較少,供需差距較大,其果實不易保存,容易出現爛果、皺皮、失水和變軟等現象,因此對火龍果進行產后處理,分級出售顯得尤為重要。
水果的產后處理是進入市場的必要環節,主要包括水果的清洗、打蠟、分級及商品包裝等。目前,水果清洗、打蠟等環節的技術已經非常成熟,但分級技術仍比較落后。水果的分級標準主要包括內部指標和外部指標兩方面: 內部指標可以通過水果的內部缺陷、甜度、酸度等指標進行描述;外部標準可以通過水果表面是否有損傷及色澤等進行描述。通過內部和外部指標對水果進行分級定價,為消費者購買水果提供了方便,也可以將品質較高的水果進行包裝以提高附加值,進行外貿出口。火龍果具有果大肉多、不易保存、易失水和皺皮的特點,可以根據其直徑、色澤及果肉水分多少進行分級。
目前,我國對水果主要通過機械化設備進行分級,針對的是外部指標,即大小和質量的分級,分級效果較差,分級效率較低。針對水果的外部缺陷識別和水果的內部指標,如水果的內部缺陷、甜度等進行的研究較少。機器視覺系統是一種通過機器視覺代替人工目測的一種設備,通過將產品轉換成圖像,并將圖像信號傳遞給圖像處理系統對其進行分析,檢測結果客觀并具有可重復性,具有檢測結果準確、檢測效率高的特點[3]。因此,可以將機器視覺系統應用在水果自動分級系統上對火龍果進行自動分級。
1 設計思路
1.1 設計原理
通過參考國家標準和火龍果的產地標準,將白肉火龍果主要分為3個等級,如表1所示。由表1可以看出:火龍果的分級主要通過果徑、果形是否有缺陷和色澤度進行分級,因此火龍果的自動分級系統主要從以上3個方面進行考慮。
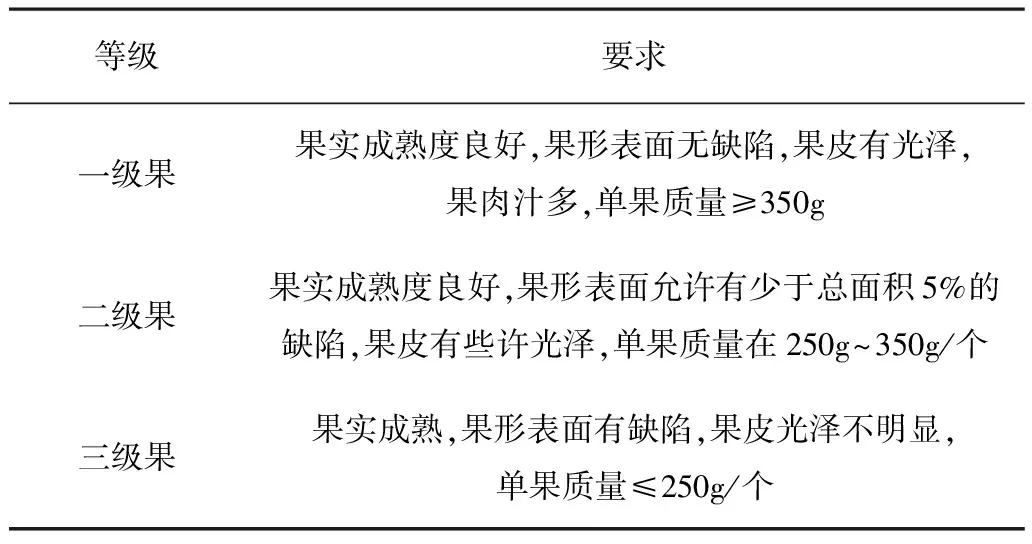
表1 火龍果分級要求
1.2 系統流程
火龍果自動分級系統主要由以下4部分組成,即水果傳送機構、光照與攝像系統、機器視覺系統和分級系統,分級流程如圖1所示。該系統基本工作原理:火龍果經由水果傳送機構連續不斷地傳送至光照與攝像系統,攝像頭對水果進行圖像采集;解碼后的圖像數據包括水果的直徑、缺陷和色澤等數據傳送給DSP圖像處理器,將圖像識別的結果與預定的結果進行對比后得出火龍果的等級,將分級結果和水果的位置信息一并傳送給系統分級機構,分級機構將火龍果落入對應等級的料槽內。
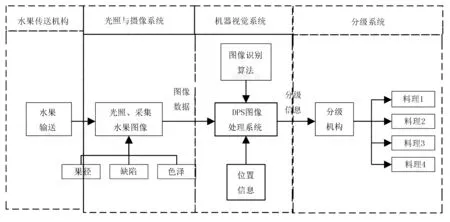
圖1 火龍果自動分級系統流程圖
根據火龍果果實較大及表面有較多頁狀鱗片的特征,傳送機構采用無底果杯式傳送方式[4-5],如圖2(a)所示。無底果杯等間距的排列在傳送帶上,每個無底果杯上面放一個火龍果,水果和無底果杯隨著傳送帶運送進入光照箱內,拍攝并采集圖像。為保證火龍果表面特征都可以被采集到,在無底果杯的上下都設置攝像頭,側面的圖像通過與平面呈45°夾角的平面鏡輸出獲得,如圖2(b)所示。
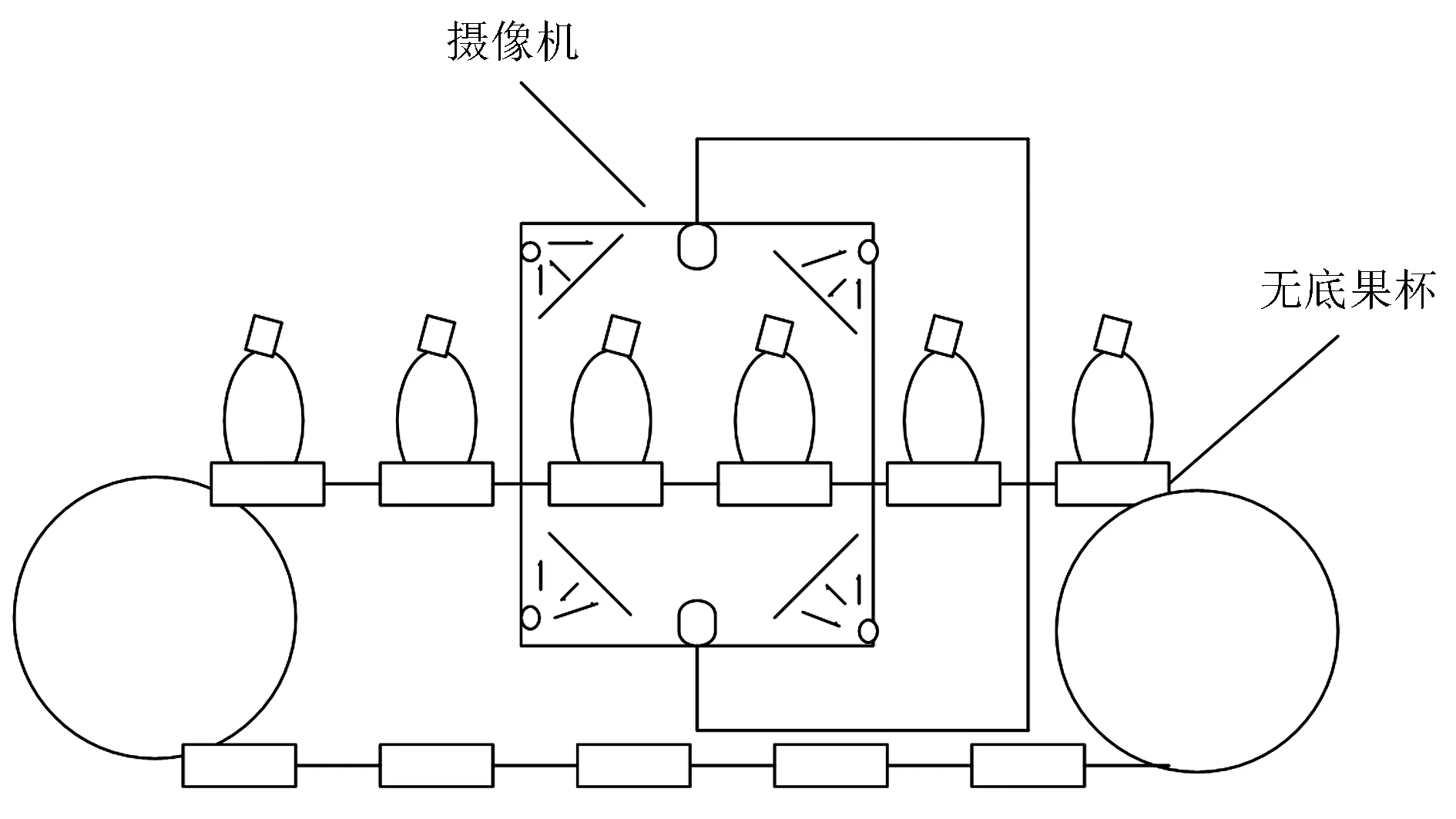
(a)
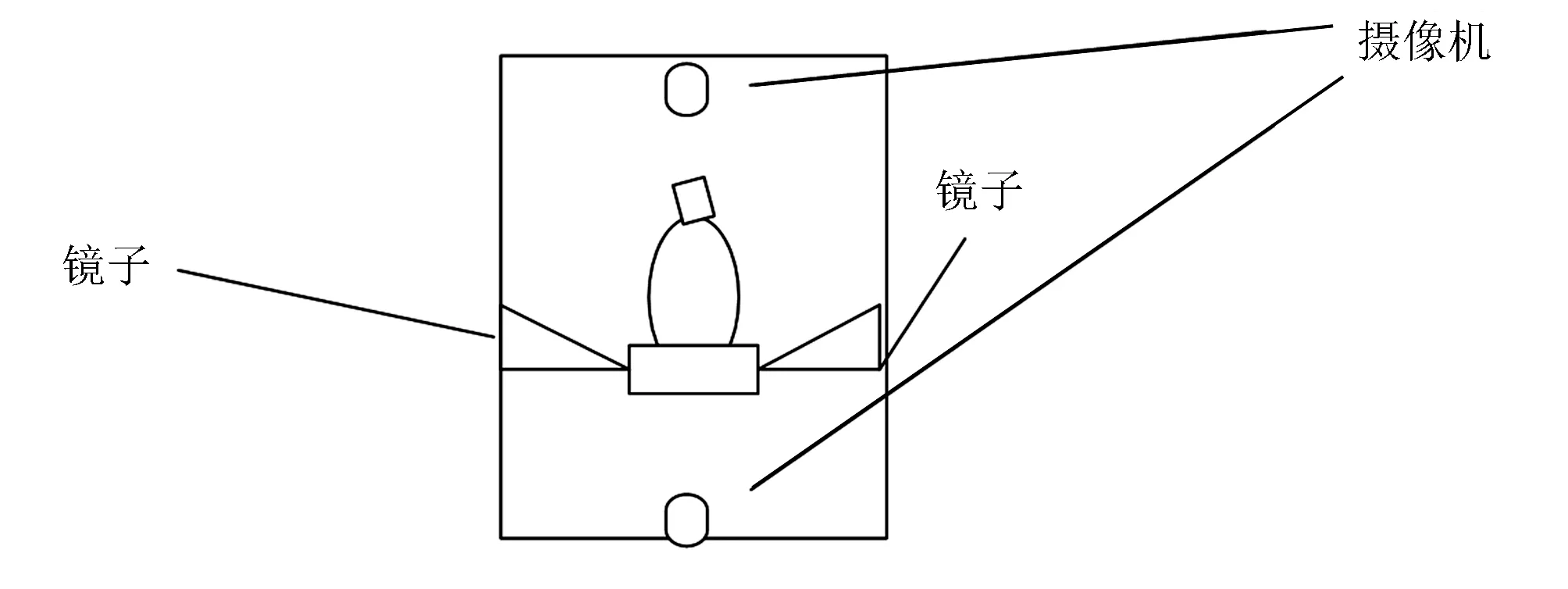
(b)
通過以上設置方式,1次拍攝即可以獲得4幅圖像。為了便于圖像后期處理,需要使水果和傳送機構的色差較大,因此將傳送裝置和拍照背景定為黑色。
DSP處理器具有運算效率和精度高的特點,因此采用DSP處理器對圖像進行處理。攝像系統拍攝的圖片傳入DSP處理器,其內部芯片將圖像信號轉為數字信號并進行算法處理;處理完成后,將結果通過芯片轉換成火龍果的等級信息,并與位置信息一起傳遞給分級系統,火龍果分級完成。
2 分級方法
2.1 缺陷識別
火龍果的缺陷識別通過給定閥值的方法進行。由于火龍果為近似圓形,因此拍攝時其表面灰度差基本相近,如果表面存在缺陷,則出現較大的灰度差。通過規定灰度差的閾值,當超過該閾值時,有缺陷存在;沒有超過該閾值,則沒有缺陷。
假設火龍果為一個標準球體,無底果杯與鏡頭平行,坐標系遠點為鏡頭中心位置,Z軸與鏡頭平面垂直,X軸為無底果杯即水果運動方向,Y軸垂直于XOZ面,則火龍果曲面可以定義為
式中r—火龍果半徑;
Zˊ—火龍果中心到鏡頭中心距離。
由于在火龍果的直徑范圍內光線的角度變化很小,因此照射到火龍果表面的光線可以看做均勻的平行光線,同時球體還具有朗伯散射表面特性,即球體表面反射強度與觀察位置無關。因此,反射光強,球體灰度的曲面方程為
當照射到火龍果表面的光強度均勻時,ρI(x,y)值為一個常數,因此灰度值只與x、y和z值有關系。
E為標準球面的灰度值,E0為火龍果表面的灰度值,可以通過試驗確定火龍果表面和標準球面的灰度差值的閥值F1,若(E-E0)
對于火龍果還應考慮到其頂部的果梗部分,先有葉片的凸出,再到中間部分凹陷,且內陷較深;火龍果表面的花萼部分有葉片凸出,且凸出部分較多。根據灰度曲面方程可知,當其他條件不變時,果梗處圖像灰度碎其他結構凸出而加深,隨其內陷也呈現內陷形式,花萼部分灰度也隨著葉子的凸出而凸出。不管是果梗還是花萼,其灰度變化與球體灰度相比均有明顯變化,且其灰度變化遠大于缺陷部分的灰度變化。因此,可以通過實驗確定果梗和花萼出灰度閥值F2,若(E-E0)>F2,則為果梗或者花萼,最終確定火龍果缺陷識別方法為
若(E-E0)
在分級過程中,若檢測到火龍果表面有缺陷點,則直接由分級系統將結果和該火龍果位置信息傳送給分級機構,由分級機構將其送入有缺陷槽。
2.2 果徑分級
水果的大小是水果分級的重要指標之一,一般將果徑定義為最大橫切面的直徑。火龍果的果徑分級要求如表2所示。
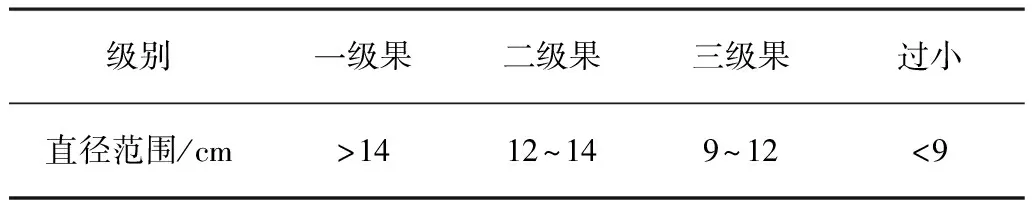
表2 火龍果果徑分級要求
火龍果在傳輸過程中,其軸向不是確定的,需要先確定其果軸方向,在與果軸垂直方向的最大火龍果直徑即為果徑,本文通過火龍果軸向對稱的特征確定火龍果的軸向[4-5]。為了得到精確的火龍果的直徑,需要對采集的4張火龍果圖片進行處理,即將每張圖片都按此方法進行果徑的計算,平均值就是火龍果的真實果徑數值。
首先,確定火龍果的形心(x0,y0),對火龍果邊界進行積分[6],則
以形心(x0,y0)為圓心,將火龍果平均分為n(偶數)等份,奇數邊界序列為r(i),偶數邊界序列為r(j),則有
當M取得最小值Mmin時,此時對應的半徑方向確定為火龍果的軸方向。垂直于軸方向測量火龍果的直徑,最大長度lmax為火龍果的果徑。
2.3 顏色分級
除了表面缺陷和果徑,火龍果的顏色也是火龍果的重要特征之一,反映著火龍果的成熟度、果實是否新鮮即果肉的含糖量等特征,因此顏色也作為火龍果分級的特征之一。
通常由CCD攝像機采集到的圖像為RGB(R:紅;G:藍;B:綠)模型,但是對于機器來說,一般適用于HIS(H:色度;S:飽和度;I:亮度)模型。因此,需要將采集到的RGB模型圖片轉換為HIS模式。由于光照與攝像系統的光強與亮度保持不變,因此S(飽和度)和I(亮度)值恒定不變,可以不予考慮,只需要考慮H(色度)。對于火龍果來說,其表面顏色只有果皮的紅色和葉片的綠色,因此G(藍)為0。
RGB轉換為HIS色度的公式[7]為
通過對火龍果的4幅圖像進行計算得出火龍果每個部分的色度值,進而得到整個火龍果的色度直方圖。通過對各等級的火龍果分析得出了每個等級的火龍果顏色分布直方圖。由于火龍果的色度均在10°~90°范圍內,將其每10°范圍內的色度取平均值,各等級火龍果色度分布如圖3所示。由圖3可以看出:一等火龍果的色度峰值出現在10°~30°,二等火龍果的色度峰值出現在30°~50°,三等火龍果的色度峰值出現在50°~70°,若峰值出現在70°以上,則說明火龍果沒有成熟或者發育不好。
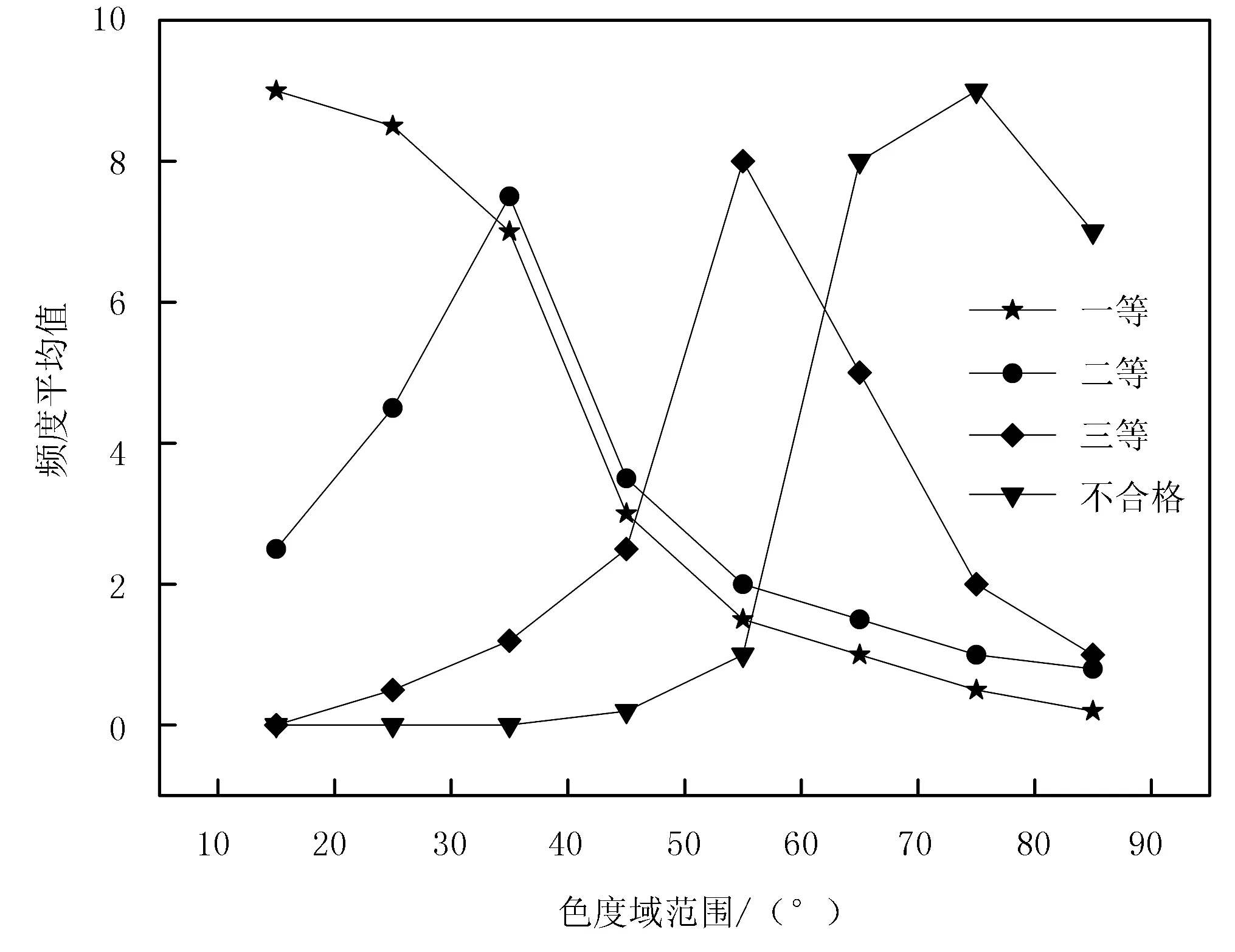
圖3 各等級火龍果色度直方圖
3 實驗結果分析
為驗證水果分級系統的可操作性,取50個不同等級的火龍果分別通過人工和系統進行分級測試,結果如表3所示。
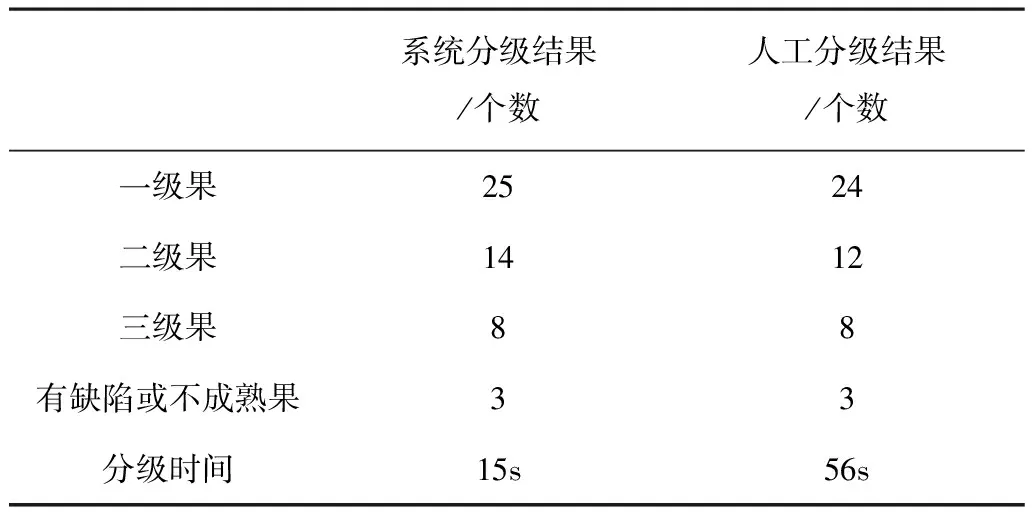
表3 系統分級和人工分級結果對比
由表3可以看出:系統分級效率遠高于人工分級,但是分級結果有差別,共有3個火龍果分級結果不同,通過對這3個火龍果進行二次人工分級鑒別,發現系統分級結果正確。經分析原因得出:人工分級工作量大、分級時間長,導致對于色度的混淆以及對于缺陷的疏漏。
4 結論
基于機器視覺技術設計了火龍果的自動分級系統,該系統主要由水果傳送機構、光照與攝像系統及機器視覺系統和分級系統組成。其中,光照與攝像系統采用CCD攝像機和DSP處理器進行圖像處理,對火龍果的缺陷檢測、大小和色度進行分級。試驗結果表明:基于機器視覺的火龍果分級系統可以高效率、高準確度地對火龍果進行分級。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
