五桿雙作用馬鈴薯振動挖掘裝置的設計與仿真
2020-10-17 00:59:02李亮亮李亞萍戚江濤蒙賀偉林元熙
農(nóng)機化研究 2020年2期
關鍵詞:振動
李亮亮,李亞萍,戚江濤,蒙賀偉,劉 瀟,林元熙
(1.石河子大學 機械電氣工程學院,新疆 石河子 832000;2.農(nóng)業(yè)部西北農(nóng)業(yè)裝備重點實驗室,新疆 石河子 832000)
0 引言
隨著我國馬鈴薯主糧化戰(zhàn)略的啟動,馬鈴薯種植面積不斷加大,已成為繼稻米、小麥、玉米之外的第四大主糧作物,預計種植面積將逐步擴大到1 億hm2。因此,馬鈴薯產(chǎn)業(yè)對我國農(nóng)業(yè)結構調(diào)整以及食品安全具有重要意義[1]。
目前,國內(nèi)馬鈴薯收獲機械,普遍存在牽引阻力和牽引功耗較大等突出問題[2]。究其原因,馬鈴薯收獲機挖掘環(huán)節(jié)功率消耗大是重要的影響因素。為此,在現(xiàn)有固定式挖掘鏟基礎上,提出了一種五桿雙作用振動挖掘裝置。資料顯示,通過振動可以有效降低挖掘裝置牽引阻力,使土壤更加疏松[3-4]。國外學者M.Spekor用分段線性近似法研究了沿著切削方向振動的減阻機理[5]。國內(nèi)學者呂金慶等人設計了4U1Z型振動式馬鈴薯挖掘機,并且對挖掘鏟和振動分離篩機構進行運動學分析[6];文學洙等進行了振動參數(shù)對動力消耗的研究[7];史增錄等進行了振動式馬鈴薯收獲機動力學模擬和模態(tài)分析[8];賈晶霞等進行了馬鈴薯收獲機擺動篩與塊莖運動仿真分析[9];陳凱設計了一種以小四輪拖拉機為動力的振動鏟式馬鈴薯挖掘機,并進行了仿真[10]。
目前,振動挖掘技術多數(shù)基于馬鈴薯分離篩運動學分析和理論力學建模研究,而針對挖掘鏟運動學仿真研究較少,對于振動減阻技術機理、挖掘形式及挖掘軌跡等需進一步研究。為此,基于以上研究成果,提出了一種五桿雙作用振動挖掘裝置。該裝置在挖掘過程中不僅在前進方向上產(chǎn)生振動,而且垂直于前進方向上也會產(chǎn)生振動。垂直于前進方向的振動會給土壤一個垂直于地面的作用力,使土壤與挖掘鏟接觸力最小,從而達到減阻的目的。同時,在結構設計的基礎上,分析了挖掘鏟的軌跡與運動特性,得到了該挖掘鏟的理論軌跡;通過建模并利用Adams軟件對機構進行運動學仿真[11],確定了該挖掘鏟的運動學特性;最后,通過試驗驗證該裝置的可靠性,旨在為振動挖掘鏟減阻機理奠定一定的基礎[12]。
1 裝置結構及工作原理
1.1 裝置結構
五桿雙作用振動挖掘裝置主要包括機架、連桿、偏心輪、擋土板、長搖桿、擋土板、短搖桿、滑切刀、三角挖掘鏟、篩條、動力傳輸裝置和掛接裝置,如圖1所示。連桿和偏心輪對稱安裝在機架兩邊,兩偏心輪通過連桿驅動振動挖掘鏟;挖掘鏟的前部有滑切刀,在五桿雙作用振動挖掘裝置工作時可以起到切碎雜草作用,還可以切碎部分土壤。該裝置結構簡單,入土、碎土作用明顯,主要參數(shù)如表1所示。
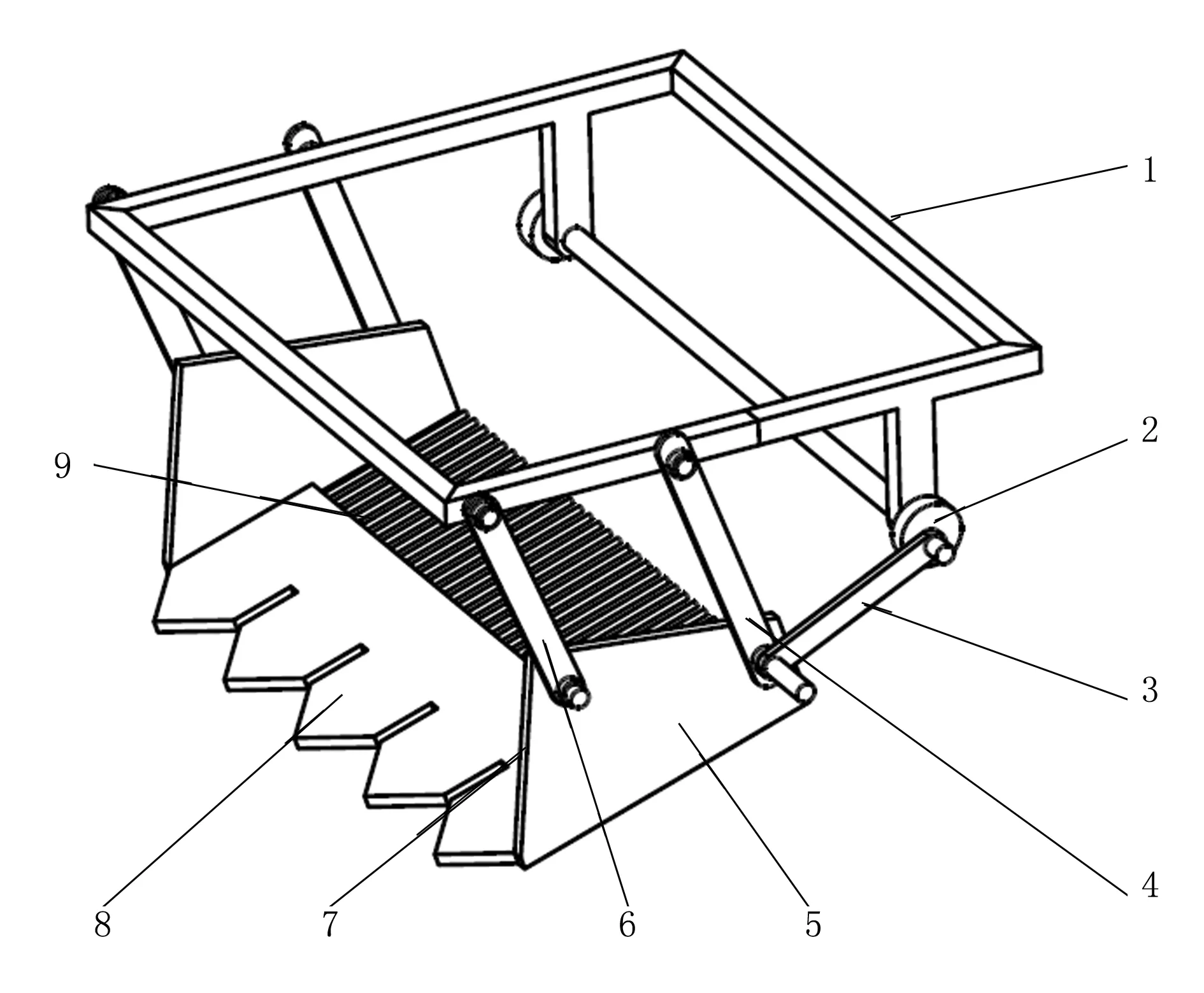
1.為機架 2.偏心輪 3.連桿 4.長搖桿 5.擋土板 6.短連桿 7.擋板滑切刀 8.三角形挖掘鏟 9.篩條
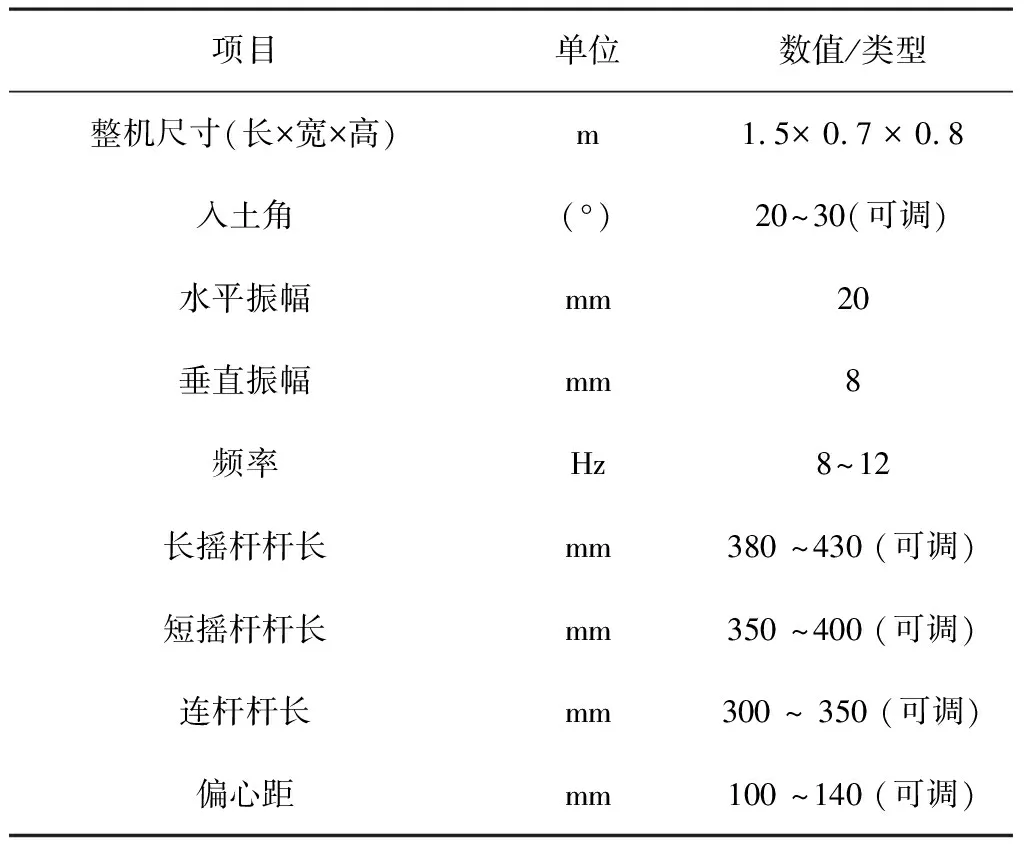
表1 裝置參數(shù)表
1.2 工作原理
工作時,由拖拉機牽引前進,拖拉機傳動軸連接變速箱,變速箱經(jīng)過換向以后,通過鏈輪將動力傳輸給偏心輪;偏心輪帶動機架兩邊對稱安裝的連桿以機架四個鉸接點為轉動中心,使振動挖掘鏟沿著前進方向前后擺動;同時,振動挖掘鏟還以長連桿低端為轉動中心,垂直于前進方向上下擺動。因此,該裝置在前進方向和垂直于前進方向上都以固定的振幅做簡諧運動,從而實現(xiàn)馬鈴薯收獲過程中的雙作用振動挖掘土壤。
2 機構運動學分析
挖掘鏟運動軌跡為兩搖桿繞著擺動臂鉸接孔圓弧的往復擺動。偏心振動裝置實質(zhì)為一個6桿機構,在此6桿機構中,采用解析法中的封閉矢量多邊形法對工作系統(tǒng)進行運動分析[13-14],采用如圖 2所示坐標系,建立挖掘鏟的運動分析[15]。根據(jù)兩個封閉圖形ABEA及BCDE,可得
l1=l6+l5
(1)
l2+l6=l3+l4
(2)
將上式寫成投影方程,得到
l1cosθ1=l6cosθ4+l5
(3)
l1sinθ1=l6sinθ4
(4)
l2cosθ2+l6cosθ4=l3cosθ3+l4
(5)
l2sinθ2+l6sinθ4=l3sinθ3
(6)
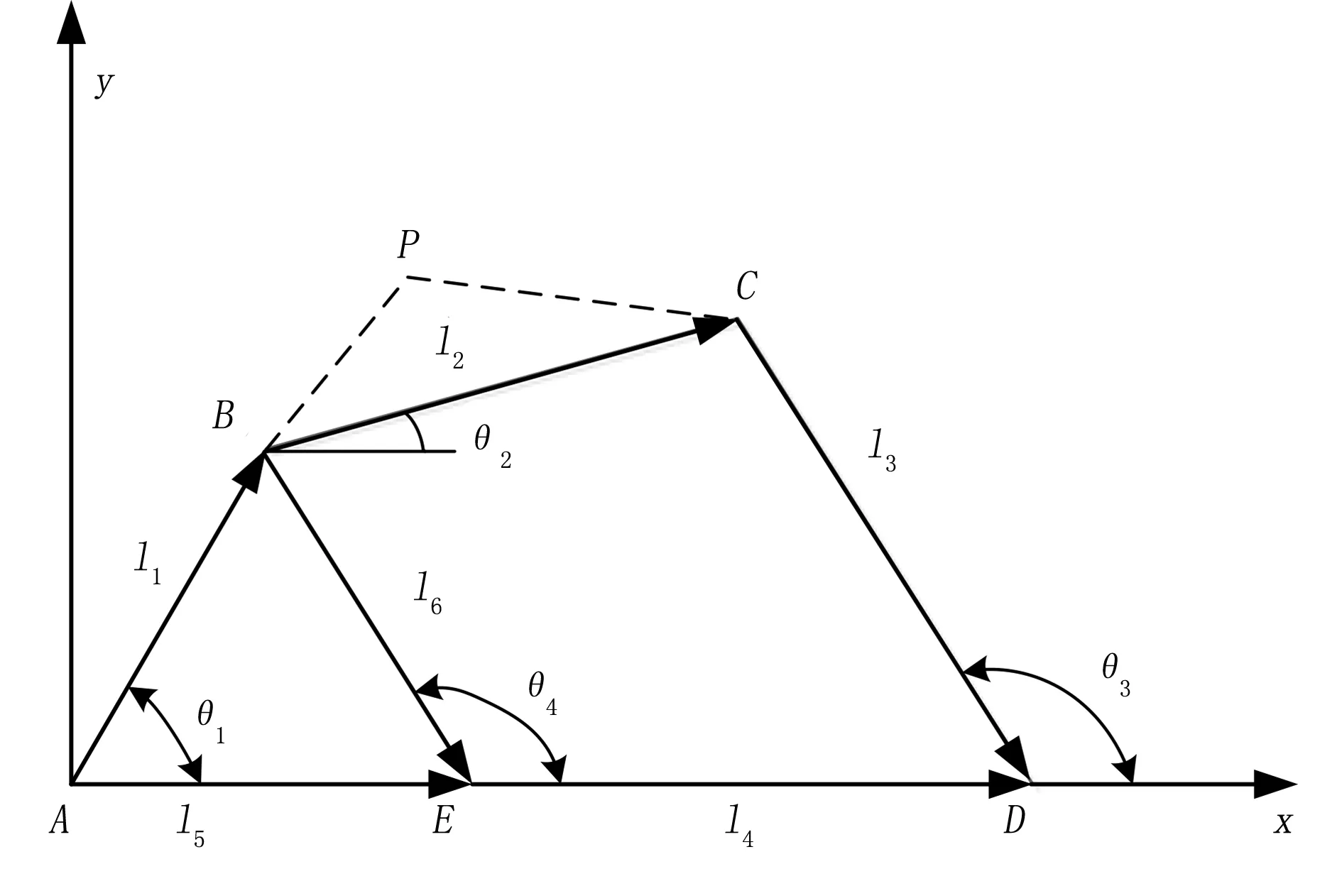
圖2 六桿機構封閉矢量多邊形
2.1 挖掘鏟的軌跡方程
聯(lián)立式(1)和式(2),可得

聯(lián)立方程(5)、(6),兩邊平方然后相加,可得

設拖拉機前進車速為V0(mm/s),則在分離篩工作時,經(jīng)過時間t(s),其上任一點P的位移
Spx=l6cosθ4+lpbcos(θ2+∠PBC)+V0t
(7)
Spy=l6sinθ4+lpbcos(θ2+∠PBC)
(8)
其中,lpb為P和B點之間的距離;V0為初速度,即拖拉機速度;t為時間。
2.2 挖掘鏟的速度方程
由位移方程(7)、(8)可以看出:振動機構在水平方向上做類似于余弦函數(shù)線的運動,垂直方向上做類似于正弦函數(shù)線的運動。對方程(3)、(4)角位移求導,可得
(9)
對方程(5)和(6)角位移求導,可得
則挖掘鏟的速度方程為
Vx=ω6l6cosθ4+ω2lpbcos(θ2+∠PBC)+V0
(10)
Vy=ω6l6sinθ4+ω2lpbcos(θ2+∠PBC)
(11)
2.3 挖掘鏟的加速度方程
對方程(9)繼續(xù)求導,可得桿6角加速度方程為
對方程(10)、(11)繼續(xù)求導,求得桿2和桿3的角加速度方程為
l3sin(θ3-θ2)
l2sin(θ2-θ3)
因此,挖掘鏟鏟尖任意一點P的加速度方程為
(12)
(13)
由上述分析可知:挖掘鏟運動過程中,鏟尖處任意一點的軌跡以固定的振幅做簡諧運動,運動軌跡為正余弦函數(shù)圖像,且速度和加速度也有類似的變化趨勢。這說明,挖掘鏟運動軌跡明確,運行狀態(tài)正常,振動挖掘運動可靠性好。
3 運動學仿真及結果分析
3.1 幾何建模
裝置偏心輪機構參數(shù)決定了挖掘鏟的運動規(guī)律,因此根據(jù)建立的挖掘鏟及偏心輪機構仿真模型,對其進行仿真并進一步確定運動參數(shù)。將SolideWorks實體模型的數(shù)據(jù)格式轉換為Parasolid(*.x-t)格式,通過ADAMS/Import模塊導入ADAMS中,重新建立完整的幾何實體模型[16-18]。
3.2 添加約束
將相應的約束添加到各構件,以限制構件之間的部分相對運動,并以此將不同構件連接起來組成一個機械系統(tǒng)[19-20]。動力MOTION-1由偏心輪軸輸入,轉速選擇50d*time帶動偏心輪旋轉,通過連桿使挖掘鏟繞機架鉸接點振動。添加具體約束情形如表2所示,ADAMS中添加約束后如圖3所示。
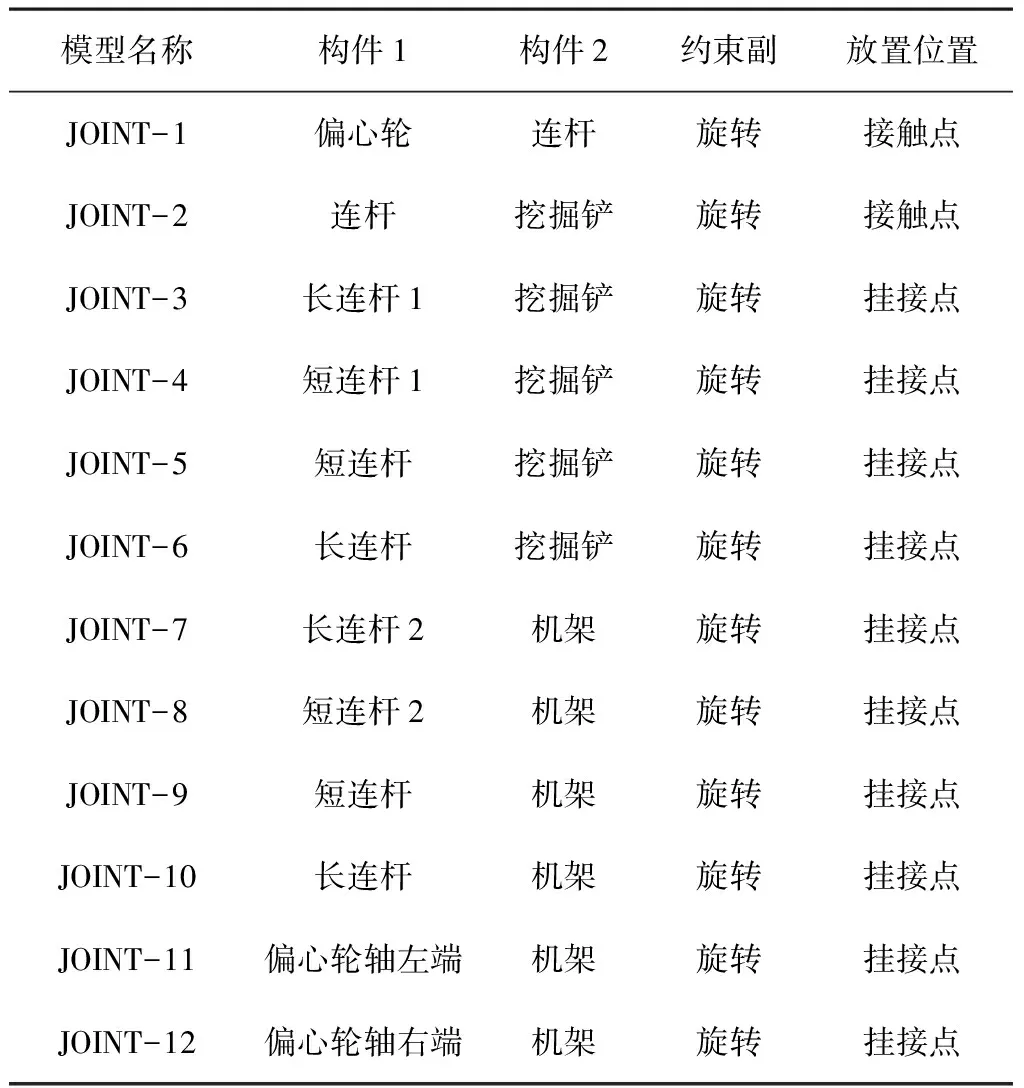
表2 各桿件運動副添加表
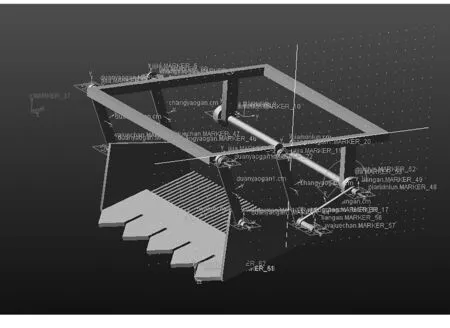
圖3 Adams建模
3.3 仿真結果
為保證仿真分析順利進行,仿真前利用模型自檢工具對樣機模型進行最后檢驗,排除建模過程中隱含的錯誤。自檢后,點擊Simulation進行仿真,終止時間為20s,仿真步長為50;然后,點擊開始仿真按鈕,進行仿真,觀察模型的運行情況,結果如圖4所示。
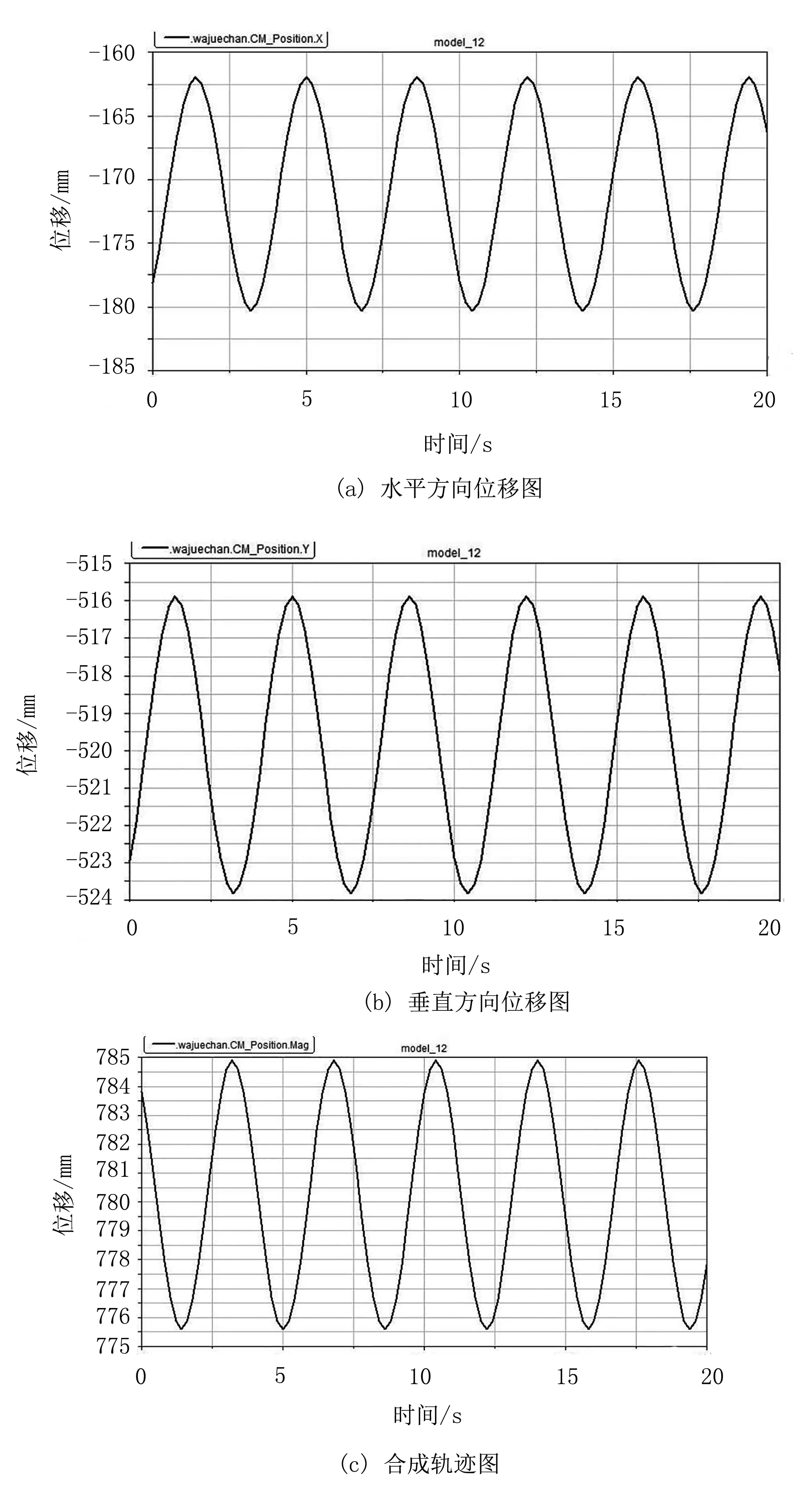
圖4 無前進位移有振動仿真圖
由圖4(a)可知:水平位移從-161.5 mm變化到+181.5mm,振幅為20mm,軌跡曲線平滑,無干涉現(xiàn)象,滿足一般小型馬鈴薯振動挖掘鏟的振幅要求。挖掘鏟在向前運動時連桿受到壓力,最大位移為-161.5mm處,達到最遠端,相應的搖桿轉角最大;同理,挖掘鏟回復原位時,連桿受到拉力,挖掘鏟通過搖桿繞機架掛節(jié)點轉動,當轉角最大時,挖掘鏟運動到最大位移處,完成1個周期的運轉。
由圖4(b)可知:垂直振幅在-516mm到-524mm之間變化,振幅為8mm,垂直振幅較小,一方面起到了振動碎土的作用,另一方面垂直振幅太大,將增加桿件結構強度。因此,本文所涉及五桿振動挖掘鏟既可以實現(xiàn)水平方向上的振動,又可以實現(xiàn)垂直方向上的振動。
由圖4(c)可知:挖掘鏟軌跡曲線平滑,不存在軌跡突變現(xiàn)象。這說明,振動挖掘鏟在水平振動和垂直振動合成時,能夠運行良好,工作可靠。由此可見,五桿雙作用振動挖掘鏟在水平和垂直方向上分別以20mm和8mm為振幅做簡諧運動。
由上述分析可知:無前進位移、有振動時,仿真與理論分析結論一致。
進一步模擬挖掘鏟真實田間運行情況,給機架與大地之間添加移動副JOINT-13,在此移動副上面添加MOTION-2,施加移動驅動力,速度為10d*time,在挖掘鏟自身往復振動的同時,隨機架以一定速度前進。圖5(a)、(b)、(c)分別為其運動狀態(tài)下的位移、速度和加速度曲線。
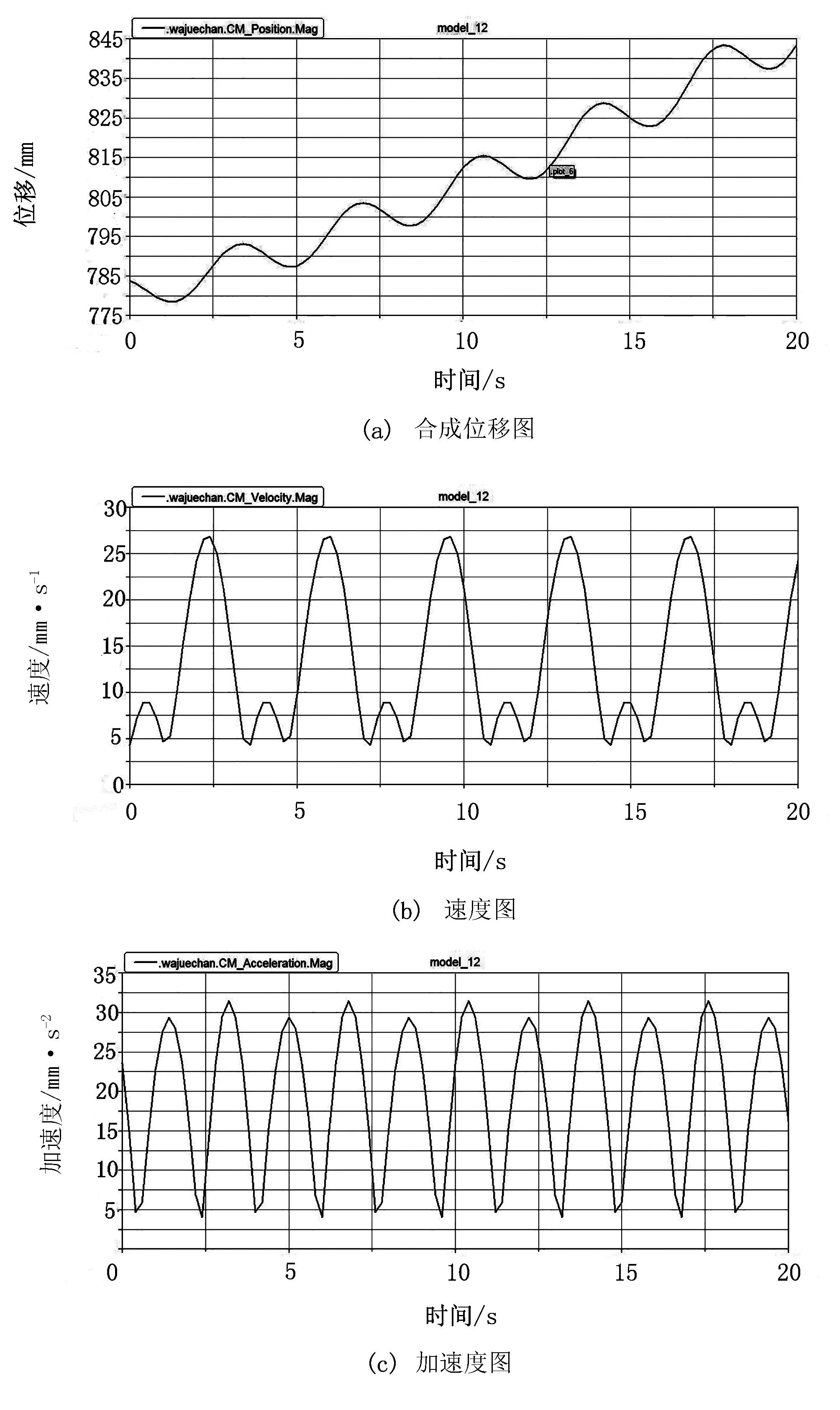
圖5 有前進位移有振動仿真圖
由圖5(a)可知:仿真20 s時,挖掘鏟隨著機架由780 mm前進到845 mm,位移為65 mm,而振動挖掘鏟仍以固定振幅做往復運動,運行互不影響,整個軌跡運行平穩(wěn),達到了振動挖掘目的。由圖5(b)機構速度圖像可知:挖掘鏟運行1個周期內(nèi),會發(fā)生兩次加速和減速。其中,第1次是挖掘鏟受曲柄驅動拉力時,挖掘鏟由此刻運動到最大位移處,速度先增大后減小,此后會進行加速;當挖掘鏟運動到對稱最大位移處時,又會進行減速,速度降到最小值,如此往復循環(huán)。由圖5(c)加速度圖像可知:在1個周期以內(nèi),加速度也會經(jīng)過兩次加速和減速,與速度圖像變化相對應。加速度變化均勻,作用力均勻,挖掘鏟運行平穩(wěn)。
4 五桿雙作用振動挖掘裝置試驗
2018年8月,在新疆維吾爾自治區(qū)石河子市五宮村進行試驗,配裝置套動力采用鐵牛654拖拉機,選取試驗用地面積1hm2,地勢平坦,土壤為灰漠土,其含水率為16.5%~19.2%。試驗情況如圖6所示。結果表明:本設計的五桿雙作用振動挖掘裝置可以實現(xiàn)雙作用振動挖掘,且碎土性能良好,工作可靠,達到了設計要求。
5 結論
1)通過對五桿機構進行設計與理論計算,得到了挖掘鏟的軌跡方程、速度方程和加速度方程,獲取了挖掘鏟在水平方向和垂直方向上的正余弦函數(shù)軌跡曲線。
2)通過對五桿機構進行三維建模和運動仿真,得到了五桿振動挖掘鏟在水平和垂直方向上分別以20 mm和8 mm為振幅進行振動,振動挖掘鏟在水平振動和垂直振動合成時,能夠實現(xiàn)雙作用振動挖掘。通過模擬實際運行軌跡,給機架添加前行動力,得出振動挖掘鏟運行平穩(wěn),不存在軌跡突變現(xiàn)象。理論與仿真分析顯示:機構可以實現(xiàn)振動挖掘,通過田間實驗,五桿雙作用振動挖掘裝置在前進方向和垂直于前進方向振動明顯。由此表明,該裝置工作可靠,碎土性能良好,達到設計要求。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學物理學報(2018年4期)2018-09-14 03:40:58
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
