電動汽車電機控制系統仿真與實驗平臺的設計與實現研究
2020-10-21 04:21:06段術林
汽車世界·車輛工程技術(下) 2020年2期
段術林
摘 要:本文圍繞電動汽車電機控制系統仿真與實驗平臺的相關問題進行分析與探討,分別從硬件結構以及軟件結構兩個層面對系統仿真與實驗平臺的設計要點進行闡述,然后基于電機控制仿真模塊、電機控制實驗模塊、以及電機對比分析模塊這三個部分,對電動汽車電機控制系統仿真與實驗平臺相關功能的實現展開分析與研究,僅供參考。
關鍵詞:電動汽車;電機控制系統;仿真;設計
1 電動汽車電機控制系統仿真與實驗平臺設計
整套設計方案應當提供一個具有高度開放性的工作環境,確保速哦構建仿真平臺能夠具備網絡化、數值化以及智能化的特點。系統應當在支持電機控制仿真功能的同時,具備進行電機控制系統實驗的能力,對兩者結果進行分析對比,以支持仿真、控制算法、參數整定等相關功能的實現。在這一總體方案設計思路下,以下對電動汽車電機控制系統仿真實驗平臺硬件結構以及軟件結構的設計要點進行逐一闡述。
1.1 硬件結構設計
基于PC單機的PXI系統涵蓋了數據通信與采集功能所需要依賴的微型計算機以及高速卡板支持,通過驅動控制信息通信功能的方式支持電機控制功能的實現。微型計算機作為整個控制系統的核心,能夠實現電機控制系統的仿真與實驗功能,高速采集板能夠對驅動器、電機以及電池組的電流、電壓、工作溫度等有關信息進行實時性采集。尤其需要注意的一點是,對于交流電動機而言,其具有極強的變性以及耦合性特點,控制功能實現期間對實時性有著非常嚴格的要求,所選擇芯片應當具備較高計算速度,因此在處理器選擇上應當體現雙CPU的特點,通過DSP與CPLD相結合的方式,滿足功能實現。
1.2 軟件結構設計
為滿足底層軟件系統應用要求,控制器所選用工作框架結構為DSP與CPLD相結合的結構模式。DSP主要負責電機數字控制功能的實現,通過生成PWM格式信號的方式,對模擬信號以及編碼脈沖信號進行采集,以支持上層軟件通信功能的實現。CPLD則負責實現故障診斷以及數據量采集處理保護功能,可面向外部執行機構進行可靠控制。在此基礎之上,通過故障處理與保障的方式,實現DSP與CPLD的協同運行。
2 電動汽車電機控制系統仿真與實驗平臺實現
2.1 電機控制仿真模塊
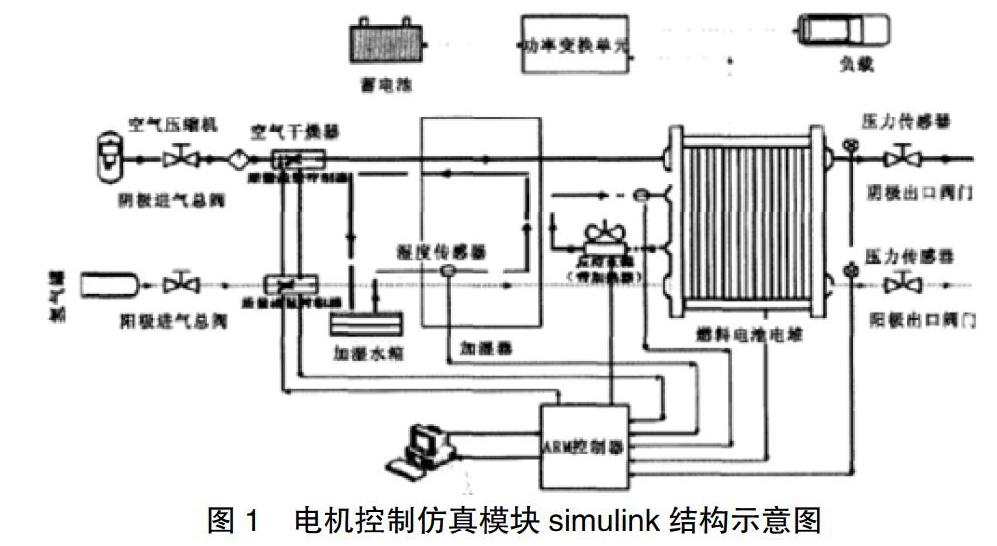
電機控制仿真模塊的實現依賴于混合編程、算法控制以及PI參數整定這三個方面的內容。將電機實際控制算法導入其中,并基于PI整定的方式簡單化系統參數,以方便混合編程的實際應用。以混合編程為例,simulink模型的調用應搭載SIT工具包實現,使其能夠在LabView環境中運行,基于該環境構建仿真模型并對相關變量進行輸入,建立基于LabView的控制頁面,并通過SIT實現兩者控制功能的調用,以滿足調用同步性的要求,具體結構如圖(見圖1)所示。
2.2 電機控制實驗模塊
搭載CAN總線實現數據采集以及通信功能,擴展格式基于SAEJ1939協議,協議長度為16字節,擴展格式為0B,通信協議中幀頭數據格式為D0-D1(2Byte),數據區格式為D2-D13(2Byte),校驗碼格式為D14-D15(2Byte)。D0代表功能碼,D1代表數據幀編號,可以對D2-D13數據進行排序處理,在此基礎之上對D14-D15數據進行CRC校驗,通過此種方式生成校驗碼高位符合地位。在具體應用工況中,可以對電動汽車實際工作狀態進行定義,電機控制數據基于16進制編碼進行表示,通過校驗該數據的方式Yu對故障進行可靠屏蔽。除此以外,電機參數被驅動控制系統所收集,并搭載IO接口以及報警協議傳輸至上下層協議模塊中,轉換為表格或波形格式提供給操作用戶。
2.3 電機對比分析模塊
電機分析對比模塊涉及到子單元包括導入模塊、數據分析模塊以及對比模塊這三個部分。在模塊功能實現的過程當中,經自動制動導入數據,支持基于數據庫對模擬以及實驗數據的直接上傳,通過檢測數據的方式激活導入模塊,并利用數據分析模塊支持對性能指標參數的選擇性分析,通過計算穩態誤差、上升時間等參數的方式,生成相關函數并支持超量計算,合理分析計算結果,以支持對數據的選擇,生成相應數據模型。
3 結束語
圍繞電動汽車電機控制系統仿真與實驗平臺的設計、實現問題展開研究,對于未來期間電動汽車的發展有著非常重要的意義。通過可靠硬件與軟件結構設計的方式,能夠確保整個仿真與實驗平臺具備良好的可操作性與適用性,并通過電機控制仿真模塊、電機控制實驗模塊以及電機對比分析模塊的全面整合,保障了系統功能的可靠實現。
參考文獻:
[1]許力,曹青松,易星.基于Z源逆變器的電動汽車永磁同步電機驅動控制策略[J].微電機,2019,52(11):56-60.
[2]王聰慧,張臻,單棟梁等.電動汽車直流充電機軟啟動控制策略的研究[J].電源技術,2019,43(08):1395-1396,1402.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技資訊(2016年18期)2016-11-15 20:09:22
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
