串聯式混合動力電動汽車電機控制系統探析
2020-10-21 04:21:06徐啟端
汽車世界·車輛工程技術(下) 2020年2期
徐啟端
摘 要:本文圍繞串聯式混合動力電動汽車電機控制系統的關鍵問題進行分析與探討,首先從弱電部分、強電部分兩個方面著手,就電機控制系統的硬件設計要點進行總結,然后對電機控制系統的軟件設計內容進行分析,僅供參考。
關鍵詞:電動汽車;混合動力;電機控制系統
1 電機控制系統硬件設計
1.1 弱電部分
對于串聯式混合動力電動汽車而言,弱電部分所需要實現的功能包括邏輯運算、外部接口以及供電模塊提供這三個方面。根據功能可以將模塊劃分為電源、接口驅動、以及微處理器這三個部分。微處理器的部分選用MCS96單片機,系統搭載CAN總線以及RS232總線提供通信結構支持,CAN控制器選用協議SJA1000系列,以滿足基于CAN總線的局域網控制功能(整套局域網由顯示器、變速箱裝置、電池管理系統、電池控制器、以及整車控制器這幾個部分構成)。除此以外,有關驅動控制單元的硬件設計會直接對電動汽車的行駛安全性以及能源利用效率產生影響,因此設計過程中必須高度關注對邏輯信號的處理問題,通過CPLD可編程邏輯器件與處理器相協調的方式,確保控制安全,芯片上選擇XC9572系列低功耗快閃存芯片,并打造VHDL語言編寫實現邏輯運算、地址譯碼、以及數據總線等相關功能。
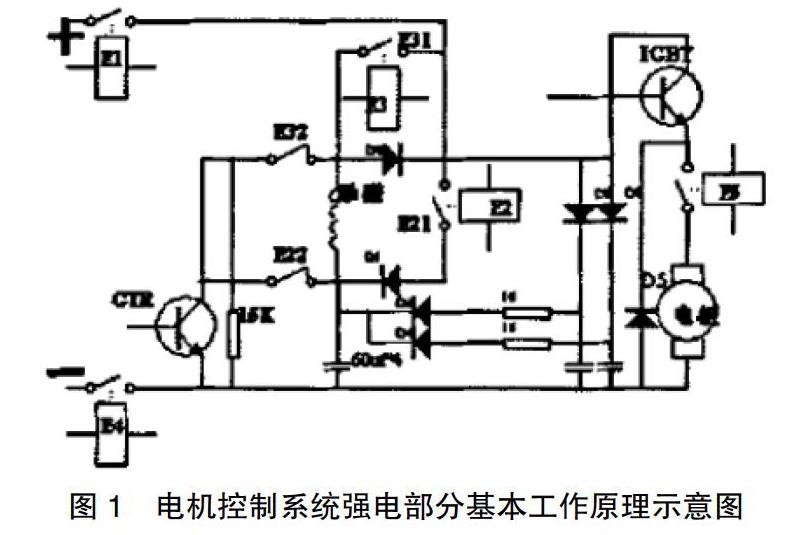
1.2 強電部分
對于串聯式混合動力電動汽車而言,電機控制系統強電部分的基本工作原理如下圖(見圖1)所示。結合圖1,1#以及4#接觸器裝置均屬于基于主回路的電源控制器裝置,搭載統一信號實現控制指令。2#、3#接觸器裝置具備勵磁輸出控制功能,搭載兩組信號滿足獨立控制功能需求。5#接觸器裝置為基于電樞回路輸出端的控制裝置。基于勵磁回路系統信號滿足電動汽車檔位調節的基本工作原理可以概括為:在空擋運行狀態下,無電流流經勵磁繞組。當電動汽車檔位切換至前進擋的工況下,勵磁電路中會生成與之對應的前進邏輯信號,并導致E2接觸片切換至常開狀態,E21接觸點切換至閉合狀態,E22常閉觸點切換至斷開狀態。當電動汽車檔位切換至后退檔的工況下,通過對后退邏輯信號的響應,導致E2接觸片回落至常態,E32常閉觸點自聯通調整至斷開模式。在此過程當中,通過調節接觸器裝置通斷性能的方式,實現控制勵磁電流方向的目的,支持電機轉向調節功能的實現,在此基礎之上滿足電動汽車前進/后退的狀態需求。在此過程當中,為確保電動汽車掛擋動作的可靠性,對電機勵磁電流大小的調節可以通過控制功率晶體管裝置所對應GTR導通占空比的方式實現。與此同時,電樞回路電流大小的調節可以基于對絕緣柵雙極型晶體管裝置所對應導通占空比進行調節的方式予以滿足。在IGBT處于關斷狀態的情況下,搭載續流二極管D5確保電機處于較為平穩的運行狀態下。
2 電機控制系統軟件設計
串聯式混合動力電動汽車電機控制系統軟件部分程序編寫基于與MCS96系列相匹配的單片機語言C196實現,可支持包括控制信號輸出、中斷函數處理、以及系統初始化操作等一系列功能的實現。
在系統初始化環節中,通過對電機控制系統程序相關控制參數初始值進行設置的方式,確保系統串口通信以及中斷功能的可靠實現。完成參數設置后開啟中斷并等待系統響應。此過程中所涉及到的中斷處理內容包括CAN總線中斷、檔位變化中斷、HS0中斷、以及串口接收數據中斷這幾個方面。特別需要注意的一點是,驅動控制功能實現會直接受到檔位信號變化的影響,在信號調整的過程當中,電機控制系統中CPLD會生成與之相對應的信號跳變,可以搭載80C196KC進行非可屏蔽終端處理的方式,及時響應電機控制系統中的相關檔位信號,以免因切換檔位而對電機控制系統的運行產生不良影響。
3 結束語
本文上述分析中嘗試圍繞串聯式混合動力電動汽車電機控制系統的關鍵問題進行分析與探討,首先從弱電部分、強電部分兩個方面著手,對串聯式混合動力電動汽車電機控制系統的硬件電路進行設計優化,對解決強弱電隔離以及高壓強流檢測控制問題有重要意義,可以以臺架為基礎滿足驅動控制系統調試功能的實現。通過對后續分析實驗結果的驗證,確保了電機控制系統輔助動力可行性以及有效性,對于多能源動力總成控制而言有非常積極的輔助意義與價值。
參考文獻:
[1]許力,曹青松,易星.基于Z源逆變器的電動汽車永磁同步電機驅動控制策略[J].微電機,2019,52(11):56-60.
[2]王露峰.基于PID控制的電動汽車直流驅動電機調速研究[J].汽車實用技術,2020(10):106-108.
