光刻機工件臺定位平臺結(jié)構(gòu)設(shè)計
2020-10-21 22:05:15葉圣義徐世福桑錦凱
機電信息 2020年8期
葉圣義 徐世福 桑錦凱
摘要:針對光刻機工件臺易受到微小震動而引起圖像偏差的問題,對工件臺定位平臺的結(jié)構(gòu)進行了優(yōu)化設(shè)計,同時改進了工作臺的調(diào)節(jié)方式,對今后光刻機工件臺的研究與改進具有良好的借鑒意義。
關(guān)鍵詞:光刻機;定位臺;三軸聯(lián)動
0 引言
本文針對光刻機自動修改定位存在誤差的問題,以光刻機工件臺定位平臺為研究對象,以接觸式光刻理論、1:1全反射投影光刻技術(shù)、反射投影技術(shù)、電子光刻技術(shù)等作為理論與技術(shù)支撐,在此基礎(chǔ)上完成了光刻機工件臺定位平臺的結(jié)構(gòu)設(shè)計。結(jié)合測量反饋系統(tǒng),本設(shè)計主要完成了對光刻機普通定位平臺的優(yōu)化,優(yōu)化部件及定位部件的設(shè)計、組裝;文件格式的轉(zhuǎn)換和零件與定位部件實體邏輯位置的裝配。同時從精度、運動方式等方面,將本文設(shè)計的光刻機工件臺定位平臺與市面上成熟的產(chǎn)品進行比較,完成了定位平臺的結(jié)構(gòu)三維圖設(shè)計。
1 基本理論
根據(jù)對各定位理論的歸納與了解可知,光刻機定位精度取決于光刻機中的像差和層之間的配準(zhǔn)精度,基于此,本設(shè)計根據(jù)要求改善了定位部件的設(shè)計、組裝以及零件與定位部件的裝配,完成了定位平臺的三維結(jié)構(gòu)設(shè)計以及六自由度平臺結(jié)構(gòu)設(shè)計,再通過計算機圖形技術(shù)和3D仿真設(shè)計、3D仿真平臺,得到定位部件的最優(yōu)設(shè)計方案。
2 定位平臺的三維結(jié)構(gòu)設(shè)計
2.1? ? 定位平臺的“331”原則
2.1.1? ? ?“331”原則
“33l”原則內(nèi)容如下:(1)設(shè)置三維測量系統(tǒng)的X、Y、Z軸標(biāo)準(zhǔn)尺寸線或其延長線相互垂直并相交于一交點上,以這三軸測量線為基準(zhǔn)建立三維坐標(biāo)系。(2)設(shè)置測量系統(tǒng)中測量平臺的X軸導(dǎo)軌導(dǎo)向面、Y軸導(dǎo)軌導(dǎo)向面與X、Y軸標(biāo)準(zhǔn)尺寸線所構(gòu)成的測量面重合,從而建立兩個運動面與一個測量面這三面共面的測量平臺。(3)設(shè)置測頭中心點與三條標(biāo)準(zhǔn)尺寸線或其延長線的交點重合。完成上述工作后,鎖定三軸標(biāo)尺與測頭的相對位置,建立三維測量系統(tǒng)。
2.1.2? ? 總體結(jié)構(gòu)設(shè)計方案
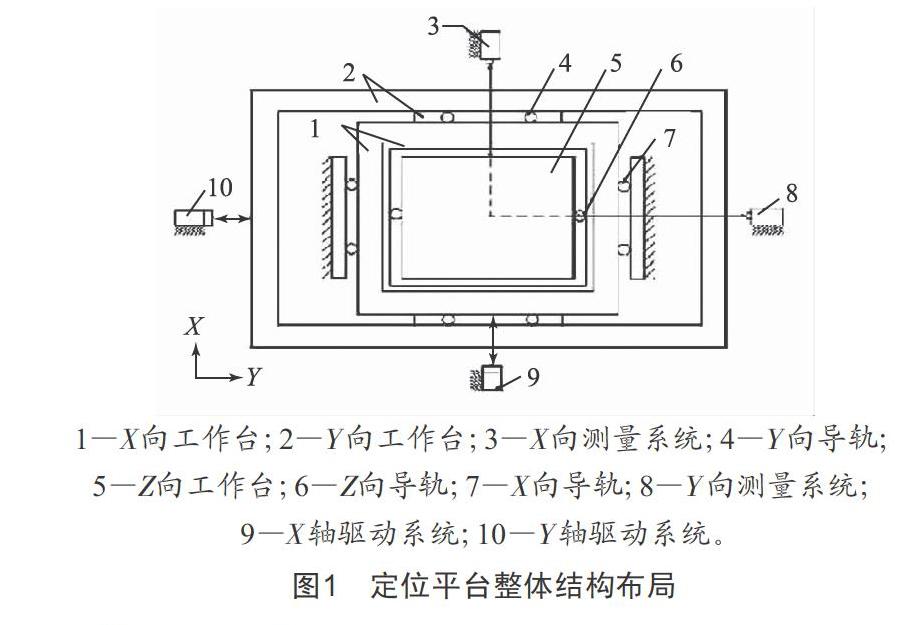
定位平臺整體結(jié)構(gòu)布局示意圖如圖1所示,設(shè)置X軸驅(qū)動系統(tǒng)和X向測量系統(tǒng)與X向工作臺固定,Y軸驅(qū)動系統(tǒng)和Y向測量系統(tǒng)與Y向工作臺固定,并通過Y向?qū)к壟cX向工作臺連接,Z向工作臺通過Z向?qū)к壟cY向工作臺連接,且Z向工作臺與水平面相互垂直。測量和定位由激光測量系統(tǒng)執(zhí)行。基站和Y向驅(qū)動系統(tǒng)都固定連接到X向工作臺,同時基礎(chǔ)平臺還需要設(shè)置能測量位移的激光器,并且Z向工作臺需要具有與激光器連接的反射目標(biāo)鏡。三維定位平臺的部件包括框架系統(tǒng)、導(dǎo)軌、平衡部分、驅(qū)動系統(tǒng)和激光干涉儀系統(tǒng)。
2.2? ? 定位工作臺的詳細(xì)結(jié)構(gòu)設(shè)計
基于設(shè)計和結(jié)構(gòu)要求,對定位工作臺三維結(jié)構(gòu)進行設(shè)計。方案設(shè)計流程如下:
2.2.1? ? Z向定位工作臺設(shè)計
從結(jié)構(gòu)設(shè)計的角度來看,有必要采取措施確保引導(dǎo)線、測量線和驅(qū)動線在同一方向上。通過設(shè)定驅(qū)動框架和電動框架的精度,可以確保引導(dǎo)線和驅(qū)動線的方向一致。通過調(diào)節(jié)Z向目標(biāo)透鏡的調(diào)整機構(gòu),可以確保引導(dǎo)線和測量線對準(zhǔn),以此實現(xiàn)Z向定位臺的并聯(lián)設(shè)計。
2.2.2? ? 三維定位工作臺的結(jié)構(gòu)優(yōu)化設(shè)計
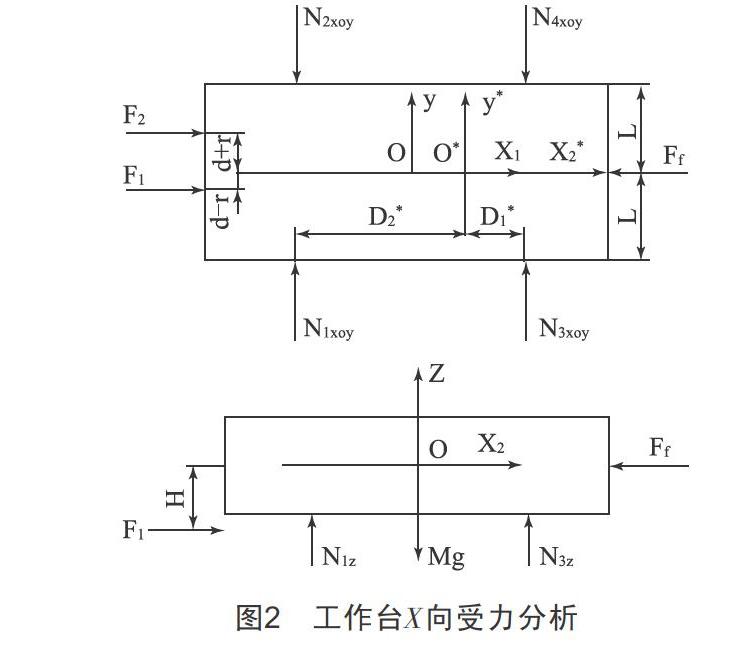
本設(shè)計利用“331”原則設(shè)計并優(yōu)化了定位平臺的基本結(jié)構(gòu),通過同步電機偏心安裝、磁流變液阻尼器和配重設(shè)計、工作臺結(jié)構(gòu)參數(shù)優(yōu)化設(shè)計,實現(xiàn)了電機驅(qū)動時定子和轉(zhuǎn)子的相對徑向位移不超過0.1 mm、工作臺平穩(wěn)移動和驅(qū)動電機負(fù)載穩(wěn)定的目的。圖2為工作臺X向受力分析示意圖。
3 六自由度平臺結(jié)構(gòu)設(shè)計
3.1? ? 六自由度平臺機構(gòu)概述
六自由度平臺主要由上下平臺、電動缸和鉸鏈組成。伺服電動缸通過鉸鏈以并聯(lián)的形式將固定底座和運動平臺連接起來,因而6個伺服電動缸均可獨立伸縮。通過6個伺服電動缸的協(xié)調(diào)伸縮,相對于固定的下平臺,運動上平臺就可以靈活實現(xiàn)空間6個自由度方向上的位姿運動。
為了獲得六自由度平臺的空間位置關(guān)系,首先建立動態(tài)坐標(biāo)系以及靜態(tài)坐標(biāo)系,即Ob-XbYbZb和Op-XpYpZp,選擇系統(tǒng)的質(zhì)心作為坐標(biāo)系的原點,并且坐標(biāo)軸的方向平行于平臺的慣性主軸方向。
3.2? ? 平臺結(jié)構(gòu)參數(shù)和技術(shù)要求
六自由度平臺的上下平臺均為不等六邊形,有6個相同的支撐桿,其長度可單獨調(diào)節(jié),通過上下平臺之間的萬向節(jié)連接。該機構(gòu)的結(jié)構(gòu)參數(shù)為上平臺外接圓r=0.5 m,下平臺外接圓r=1.25 m,六邊形短邊對角30°,六邊形長邊對角90°。
4 結(jié)語
本設(shè)計通過運用多個軟件,以光刻機定位平臺為對象,完成了對定位平臺的設(shè)計、建模和仿真(由于篇幅有限,沒有展開論述),并結(jié)合“331”原則建立了三維平臺的結(jié)構(gòu)基礎(chǔ),通過設(shè)定驅(qū)動框架和電動框架的精度,完成了Z軸升降平臺的設(shè)計,實現(xiàn)了電機驅(qū)動時定子和轉(zhuǎn)子的相對徑向位移不超過0.1 mm、工作臺平穩(wěn)移動和驅(qū)動電機負(fù)載穩(wěn)定的目的。
本設(shè)計還通過改進工作臺調(diào)節(jié)方式,先由三軸聯(lián)動進行粗調(diào),再由高精度六自由度平臺進行微調(diào),完成了光刻機工作臺的結(jié)構(gòu)優(yōu)化與整體方案設(shè)計,對今后光刻機工件臺結(jié)構(gòu)的研究與改進具有重大意義。
[參考文獻]
[1] 成榮,王希遠(yuǎn),朱煜,等.基于有限元方法的光刻機工件臺線管組件結(jié)構(gòu)優(yōu)化[J].清華大學(xué)學(xué)報(自然科學(xué)版),2017,57(8):798-802.
[2] 宋躍,張常江,強盛,等.光刻機工件臺自轉(zhuǎn)電機控制系統(tǒng)設(shè)計[J].自動化技術(shù)與應(yīng)用,2016,35(9):20-23.
[3] 婁建鵬.α光刻樣機工件臺系統(tǒng)的動態(tài)特性分析[D].哈爾濱:哈爾濱工業(yè)大學(xué),2014.
[4] 胡金春,高陣雨,成榮,等.光刻機工件臺六自由度超精密位移測量研究[J].中國基礎(chǔ)科學(xué),2013,15(4):17-20.
[5] 萬勇利,韓記曉,魏凱,等.光刻機雙工件臺控制系統(tǒng)任務(wù)調(diào)度設(shè)計[J].自動化技術(shù)與應(yīng)用,2016,35(7):129-134.
收稿日期:2020-03-01
作者簡介:葉圣義(1998—),男,江蘇人,研究方向:機械設(shè)計。
