機載LiDAR技術在1∶500地形圖測繪中的應用
2020-10-25 02:38:34范煒
工程技術研究 2020年18期
范 煒
(安徽省蕪湖縣自然資源和規劃局,安徽 蕪湖 241100)
LiDAR(Light Detection and Ranging) 系統集成全球定位技術(Globe Position System,GPS)、慣性導航技術(Inertial Navigation System,INS)、激光測距技術(Scanning Laser Ranging,SLR),快速采集地表點的攝影測量裝置,能自動生成精確的數字地面模型(Digital Terrain Model,DTM)和數字表面模型(Digital Surface Model,DSM)。隨著機載LiDAR技術的不斷發展,其已被大量應用于數字線化圖(Digital Line Graphic,DLG)的制作中。文章以1∶500地形圖制作項目為例,闡述機載LiDAR技術在獲取地表點云數據的操作流程,探究其在測圖過程中的關鍵應用。
1 LiDAR技術工作原理
激光點根據LiDAR激光測距儀獲得的斜距以及記載位置與姿態的POS系統數據,并在慣性導航系統定義的各坐標系中旋轉、平移與WGS-84坐標系間的相互轉換,計算出LiDAR地云的地面點目標,定位方程如下:

式中:RW為局部橢球系統到WGS-84坐標系統的轉換矩陣;RGEO為局部橢球系統與導航坐標系之間的轉換矩陣,近似為單位矩陣,因此公式(1)簡寫成公式(2);RNW為導航坐標系統與WGS-84坐標系統間的轉換矩陣;RINS為IMU載體坐標系變換至導航坐標系的矩陣;Rlu為安置角旋轉矩陣;Rlb為瞬時激光光束坐標系轉換至激光坐標系統的旋轉矩陣;為激光點數據在激光光束坐標系中的位置向量;lo為GPS天線相位中心距激光器發射中心的偏移向量;PGPS為目標激光點在WGS-84坐標系統中的坐標。其中:

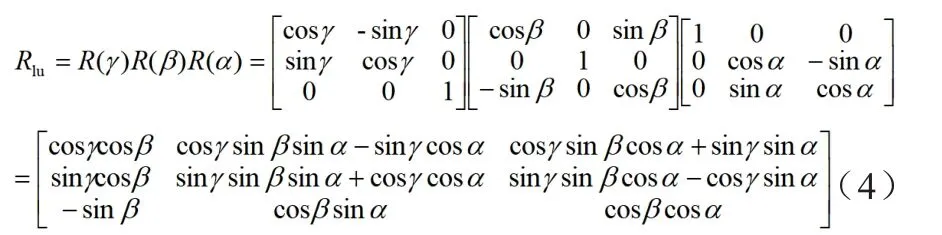
式中:α、β、γ為激光掃描儀與IMU載體坐標系間的安置誤差角;同時定義r(側滾角)、p(俯仰角)、h(航向角)為IMU載體坐標系與導航坐標系的姿態角,由此可得:
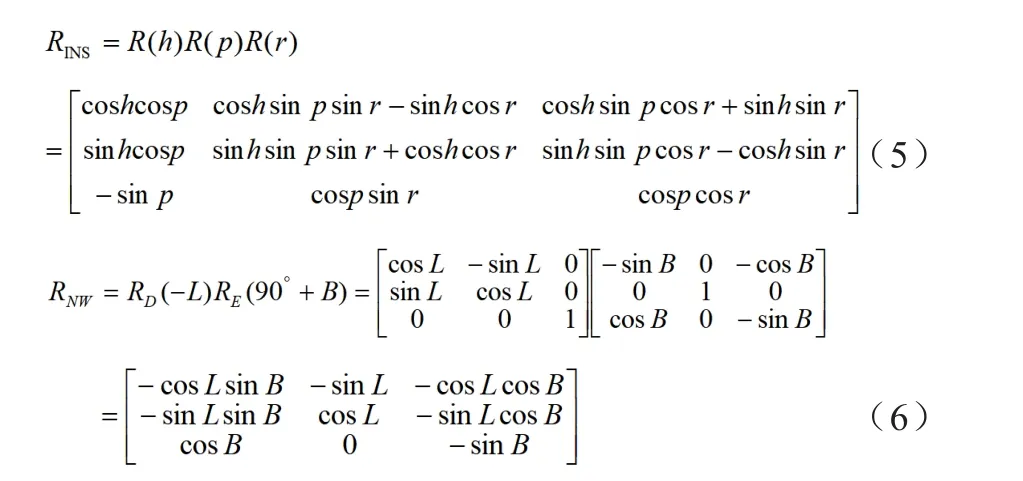
式中:L和B為飛機所在的經度和緯度。
2 應用實例
2.1 項目概況
項目區地形主要以山區和高山區為主,最高海拔約1750m,最低海拔約210m,項目區面積共計約400km2。由于項目工期較短,綜合考慮測圖速率與精度,項目采用機載LiDAR技術進行1∶500地形圖產品制作,包括DLG、數字正射影像(Digital Orthophoto Map,DOM)成果。機載LiDAR測量系統采用掃描鷹HS-1600激光掃描測圖系統,集成了卓越性能的RIEGL測繪專業激光掃描儀以及Applanix慣導衛星定位姿態控制單元,其掃描距離可達1350m,掃描速度可達82萬點/s,掃描視角330°,并搭載PhaseOne專業相機系統,有效像素8000萬。航攝平臺采用適合山區作業的S-300C多功能直升機。
2.2 技術方案
(1)數據采集。①航線設計。項目區地形復雜,高差較大,在保證產品精度質量的前提下,綜合考慮測區地形、飛行安全、航測效率的情況,旁向重疊設計為40%,航向重疊設為70%,航線水平距離為200m。②GPS基站布設。機載LiDAR系統采用差分GPS定位技術,提前在地面控制站上安置GPS接收機,單臺GPS基站有效測量范圍為30km,雙臺基站的控制距離在60km內。根據實地情況,此次項目布設2臺基準站,基站間距離約為25km,機載LiDAR系統與地面接收機的采樣頻率均設置為1Hz或2Hz。③像控與檢查點測量。為提高成圖數據精度,消除系統誤差,滿足1∶500成圖地物點與高程精度要求,均勻布設像控點,像控點間距約2km,并以部分像控點做平面檢核點。同時在高差明顯區域,測量高程檢核點,以檢核點云數據精度。④檢校飛行。項目采用的檢校飛行方式是以一個較低的航高飛行相互垂直的十字形航線,并用相對較高的航高飛行兩條相互垂直的十字形航線,航高不同的航向相反。不同航高有助于檢校的Pitch和Heding角值更準確,檢校場有地形起伏、帶尖角樓房、平坦道路的地方。姿態角補償收斂記錄如表1所示。⑤航跡解算。應用載波相位模糊度解法,實時解算動態定位中的整周模糊度,提高動態定位效率。結合動態GPS數據和GPS基站數據,集成IMU數據采用正反算法生成固定整數差分GPS航跡線,包括航跡時刻、位置、Omega、Phi、Kappa的航跡線文件。根據掃描儀偏心分量與相機偏心分量,計算得出相機軌跡數據與激光軌跡數據。
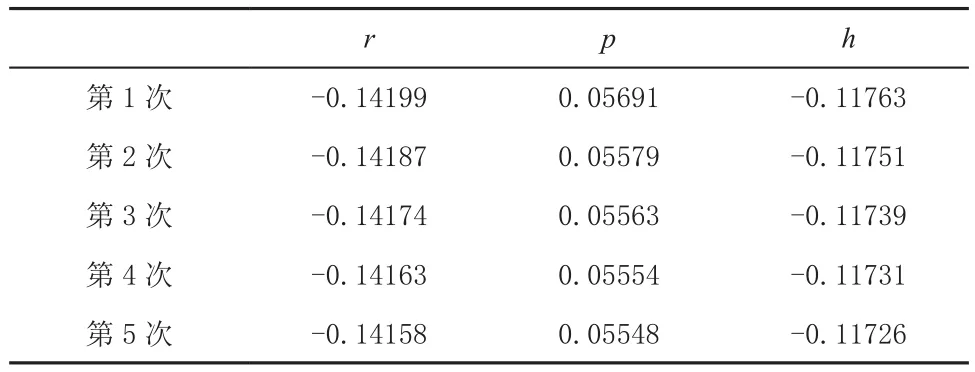
表1 姿態角補償收斂記錄 單位:°
(2)數據處理。①坐標轉換。動態定位獲取的激光點坐標屬于WGS-84坐標系,項目成果坐標基準要求為國家2000大地坐標系,高程為水準高,需進行WGS-84坐標系與大地坐標系間、大地高與水準高間平面與高程的坐標轉換。選取覆蓋項目區的4個已知坐標與其對應的WGS-84坐標求解平面轉換參數,獲取點云數據所需的平面坐標。采用曲面擬合的方法,將橢球高改正到大地水準面的正常高上,完成點云數據的高程坐標轉換。②點云分類。機載LiDAR數據密集、量大,主要包括激光點的三維位置、回波強度數據、回波次數數據、指定脈沖的回波數、掃描角數據、GPS時間、RGB等信息。
點云數據處理的主要方式為點云分類,將點云數據按實際情況分類到各個數據層中。由于點云數據量大,先對數據做抽稀處理、航帶重疊裁切、冗余數據剔除。地面材料不同的光譜特征與高程的不同導致返回的脈沖信號強弱不同,綜合機載LiDAR點云的多回波特性、反射強度,獲取第一返回的脈沖信號,即只記錄地面的脈沖信號,并采用分類算法將點云數據進行粗分類,分離出地物點與地面點。而精分類是在粗分類基礎上去除采集地面點系統誤差,包括地面點過濾、特征提取等,實現點云數據按照不同的點云定義不同的層要求。地面點與地物點的精分類由人工干預完成,對高程突變區、噪聲不明區、調試算法或參數,重分類錯誤分層的點,主要彌補濾波分類算法中地表、地物數據分離準確低的不足。點云數據分類前后圖如圖1所示。
(3)DLG制作。根據影像處理系統軟件,自動完成空中三角測量。地物采集過程中,直接調用空三加密成果。DLG制作分別為等高線制作與地物采集,地物采集在數字測量系統軟件中進行,并保持實際地物的完整性、準確性;等高線由處理后的點云數據經過地面點精分類后自動生成,并采用抽稀后的LiDAR點作為高程注記點。點云成果數據與測圖的數據結合,利用cass軟件對圖形修測、編輯,并根據野外調繪成果,生成1∶500DLG數據。
3 精度分析
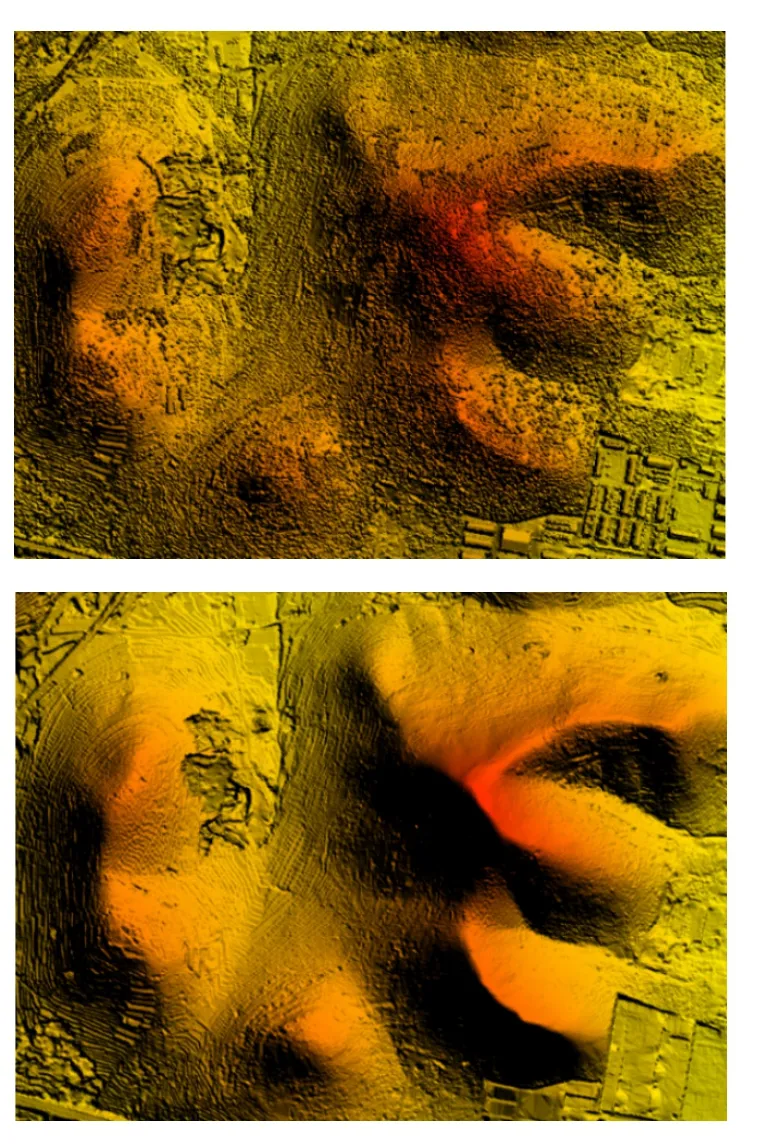
圖1 點云數據分類前后圖
點云數據與DLG數據精度由野外測量散點進行檢核,計算出點云數據與DLG的精度如表2所示。根據1∶500數字化地形圖成圖規范平面中誤差為±0.2m,高程中誤差為±0.5m,點云數據高程中誤差為±0.5m。由此得出,機載LiDAR技術輔助1∶500地形圖測繪滿足精圖要求。
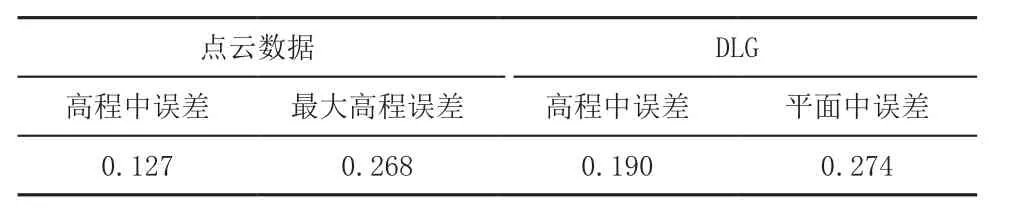
表2 點云數據與DLG的精度 單位:m
4 結束語
采用機載LiDAR技術,能夠快速采集地形數據,激光能夠部分穿透植被,快速獲取地面三維坐標。山區地形圖制圖較為復雜,工作量較大,輔以機載LiDAR技術,能提高工作效率。因此,機載LiDAR技術適合工期緊張的地形圖測繪項目。應用機載LiDAR技術測制山區大比例尺地形圖能夠滿足精度要求,與傳統航測成圖相比,高程中誤差要比平面中誤差小。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
