一種乒乓球顛球機器人的設計
2020-10-26 06:51:50陳昊汪林玉楊磊劉童
機電信息 2020年26期
關鍵詞:機械臂
陳昊 汪林玉 楊磊 劉童
摘要:根據顛球運動的特點,設計了乒乓球顛球機器人軟硬件。乒乓球顛球機器人主要由機械臂、深度傳感器、PC、單片機組成。深度傳感器獲取乒乓球圖像信息,并將該信息傳給PC,PC利用圖像信息解算乒乓球實時三維位置信息,并結合乒乓球的動力學模型預測乒乓球軌跡,將該軌跡信息傳給單片機,單片機根據乒乓球軌跡信息控制機械臂顛球。乒乓球顛球機器人為機器人智能控制提供了參考。
關鍵詞:機械臂;乒乓球空間定位;軌跡預測;顛球控制
0 引言
顛球是指通過腿、手或工具讓球在豎直面內做上下往復運動。顛球機器人屬于服務機器人下的娛樂機器人分支,以供人觀賞、娛樂為目的。乒乓球顛球機器人集多種技術于一身,如機械臂控制技術、運動目標識別定位預測技術、動態系統控制技術等,這些技術可以方便地移植應用到其他領域,為智能機器人的研究提供參考。
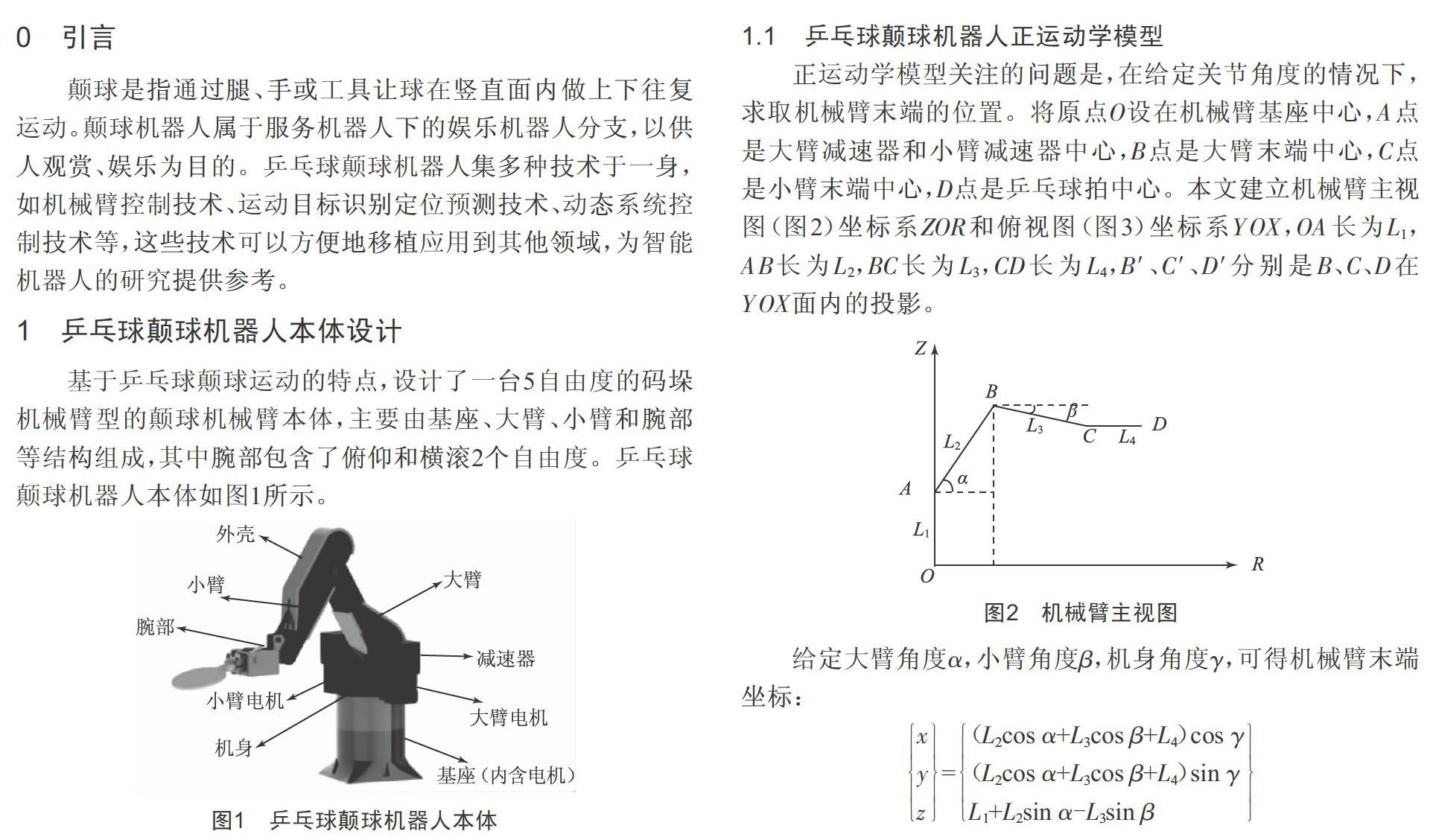
1 乒乓球顛球機器人本體設計
基于乒乓球顛球運動的特點,設計了一臺5自由度的碼垛機械臂型的顛球機械臂本體,主要由基座、大臂、小臂和腕部等結構組成,其中腕部包含了俯仰和橫滾2個自由度。乒乓球顛球機器人本體如圖1所示。
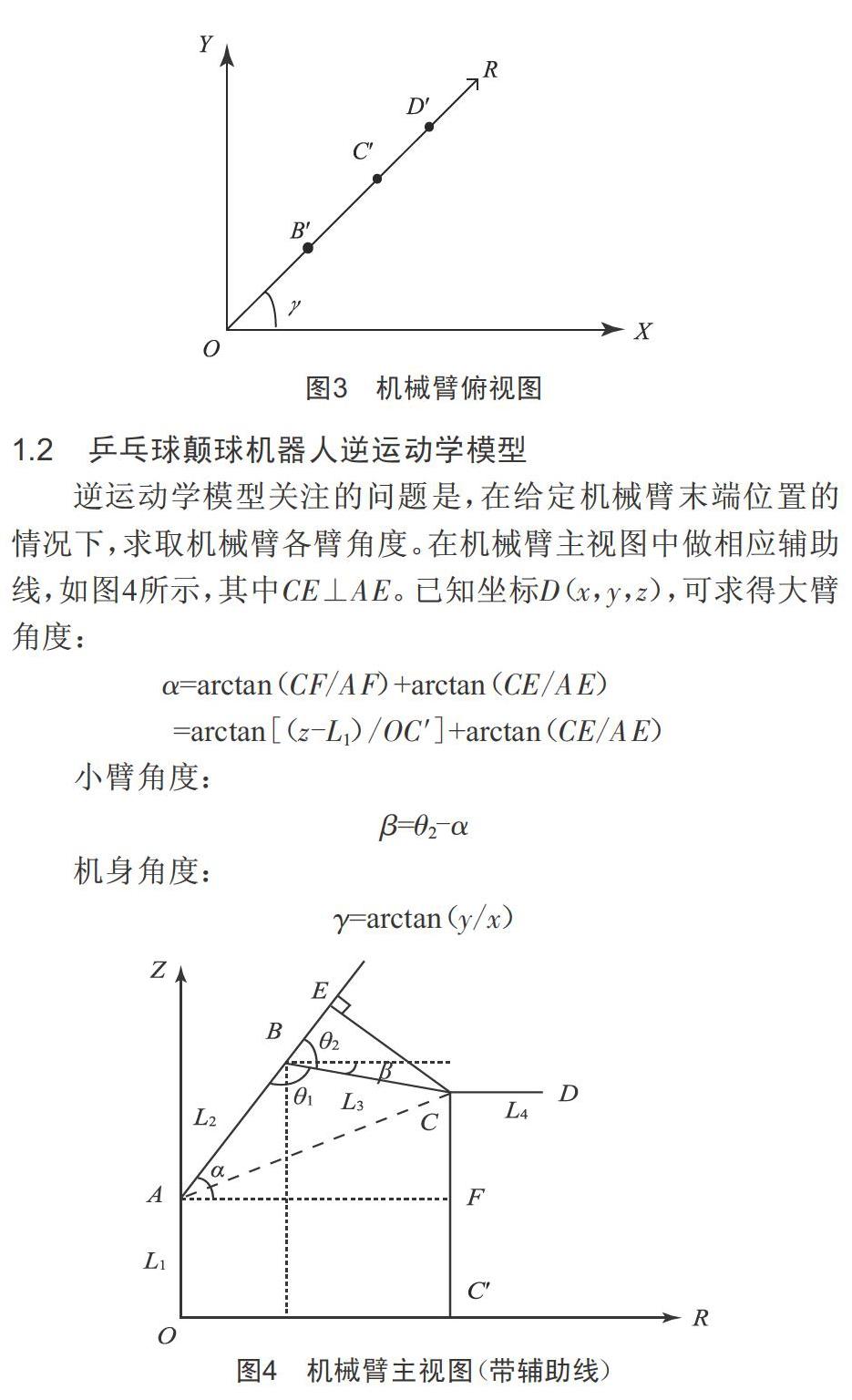
1.1 ? ?乒乓球顛球機器人正運動學模型
正運動學模型關注的問題是,在給定關節角度的情況下,求取機械臂末端的位置。將原點O設在機械臂基座中心,A點是大臂減速器和小臂減速器中心,B點是大臂末端中心,C點是小臂末端中心,D點是乒乓球拍中心。本文建立機械臂主視圖(圖2)坐標系ZOR和俯視圖(圖3)坐標系YOX,OA長為L1,AB長為L2,BC長為L3,CD長為L4,B′、C′、D′分別是B、C、D在YOX面內的投影。
給定大臂角度α,小臂角度β,機身角度γ,可得機械臂末端坐標:
xyz=(L2cos α+L3cos β+L4)cos γ(L2cos α+L3cos β+L4)sin γL1+L2sin α-L3sin β
1.2 ? ?乒乓球顛球機器人逆運動學模型
逆運動學模型關注的問題是,在給定機械臂末端位置的情況下,求取機械臂各臂角度。在機械臂主視圖中做相應輔助線,如圖4所示,其中CE⊥AE。已知坐標D(x,y,z),可求得大臂角度:
α=arctan(CF/AF)+arctan(CE/AE)
=arctan[(z-L1)/OC′]+arctan(CE/AE)
小臂角度:
β=θ2-α
機身角度:
γ=arctan(y/x)
2 控制電路設計
控制電路需要為系統各部分提供穩定的電源,保證系統能夠穩定工作。該系統有4種電壓:(1)220 V電壓來自于電網,為攝像頭、PC、開關電源1、開關電源2供電;(2)60 V電壓來自于開關電源1,為步進電機驅動供電;(3)5 V電壓來自于電腦,為角度傳感器、單片機、遙控器供電;(4)6 V電壓來自于開關電源2,為舵機供電。手持控制器用于手動控制機械臂,方便機械臂的調試。角度傳感器用于反饋機械臂的手臂角度。單片機是整個系統的控制核心,它可以與PC、角度傳感器、遙控器相互通信,可以驅動步進電機,給舵機發出控制信號。該系統各部分都采用了獨立供電電源,減少了系統各部分之間的干擾。
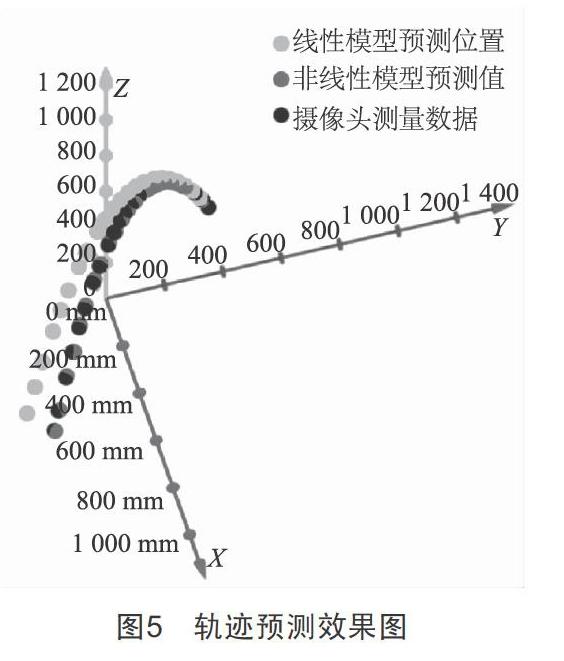
3 機器視覺設計
為了實現穩定顛球,機器人需要通過機器視覺完成乒乓球的識別、空間定位和軌跡預測功能,其中乒乓球的空間定位是核心問題,而實現空間定位的關鍵是獲取深度數據,即獲得目標到傳感器的距離。機器人通過對乒乓球的顏色識別和形狀識別,確立乒乓球在圖像上的位置,通過深度相機獲取該位置的深度數據,求得乒乓球的空間位置,最后采用基于線性或非線性模型的軌跡預測模型,預測乒乓球軌跡。軌跡預測效果如圖5所示,軌跡預測平均誤差為12 mm。
4 顛球控制策略
設定乒乓球擊打平面和球拍初始平面;預測乒乓球到達擊打平面時的位置、速度、時間;主控系統根據乒乓球在擊打平面的狀態信息,控制球拍到達預測擊打位置的正下方,然后控制球拍豎直向上運動,并同時控制球拍姿態和速度;最后球拍豎直向下運動返回球拍初始平面。乒乓球與球拍碰撞后會有能量損失,如果球拍始終保持靜止,顯然乒乓球最終會停止運動,所以碰撞時球拍需具有一定速度。球拍達到一定速度是需要時間的,所以每次彈球的高度不能太低。由于機器人視覺探測范圍有限,乒乓球的彈球高度也不能太高,本項目將乒乓球彈球的高度設定為0.5 m。機械臂的工作空間是一定的,而且在工作空間邊緣,機械臂的運動性能也有所下降,所以機器人需要在機械臂有更好運動性能的工作空間內進行顛球,即要實現穩定顛球,需對顛球后乒乓球的彈起高度以及乒乓球在擊打平面的落點位置加以控制。
5 結語
本文闡述了乒乓球顛球機器人的本體設計、控制電路設計、機器視覺設計要點和顛球控制策略,乒乓球顛球機器人是一個典型的實時智能系統,它所采用的技術可以直接移植應用到機器人研究的其他相關領域,具有很高的科研價值。
[參考文獻]
[1] 譚民.先進機器人控制[M].北京:高等教育出版社,2007.
[2] 季歲陽.乒乓機器臂的電氣設計和實時系統開發[D].杭州:浙江大學,2011.
[3] 李金泉,楊向東,付鐵.碼垛機器人機械結構與控制系統設計[M].北京:北京理工大學出版社,2011.
[4] 向瑞.乒乓球機器人控制系統及擊打策略研究[D].哈爾濱:哈爾濱工業大學,2011.
[5] 章逸豐.快速飛行物體的狀態估計和軌跡預測[D].杭州:浙江大學,2015.
收稿日期:2020-09-01
作者簡介:陳昊(1992—),男,四川成都人,實驗師,研究方向:自動化、機器人。
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
