捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)
2020-10-28 05:05:28蔡體菁黃俊翔
壓電與聲光 2020年5期
關(guān)鍵詞:系統(tǒng)
蔡體菁,黃俊翔
(東南大學(xué) 儀器科學(xué)與工程學(xué)院,江蘇 南京 210096)
0 引言
海洋對(duì)經(jīng)濟(jì)發(fā)展和國(guó)家安全的作用越來(lái)越重要,探索和開(kāi)發(fā)海洋已成為我國(guó)一個(gè)戰(zhàn)略任務(wù)。水下自主導(dǎo)航是完成這個(gè)戰(zhàn)略任務(wù)的重要手段,重力無(wú)源導(dǎo)航具有長(zhǎng)航時(shí)、高精度和隱蔽性好的特點(diǎn),受世界各海洋大國(guó)的高度重視,成為一個(gè)重要的研究方向[1-2]。20世紀(jì)80年代,美國(guó)研制出含有通用重力敏感模塊的無(wú)源導(dǎo)航系統(tǒng)[3-4],該無(wú)源導(dǎo)航系統(tǒng)水下航行時(shí)間長(zhǎng),導(dǎo)航精度高,能延長(zhǎng)慣性導(dǎo)航系統(tǒng)的重調(diào)周期,但成本較高。為實(shí)現(xiàn)低成本的重力無(wú)源導(dǎo)航系統(tǒng),東南大學(xué)提出了一種由速率方位慣性平臺(tái)、重力傳感器、重力圖、深度計(jì)和計(jì)程儀組成的重力無(wú)源導(dǎo)航系統(tǒng)[5]。近十幾年來(lái),我國(guó)慣性技術(shù)發(fā)展迅猛,激光陀螺旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)定位精度和捷聯(lián)式重力儀測(cè)量精度得到提高[6-8],且其成本較低。本文提出的捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)由激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)、計(jì)程儀、深度計(jì)、光纖陀螺捷聯(lián)式重力儀和數(shù)字重力異常圖組成。2019年底,捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)進(jìn)行了長(zhǎng)時(shí)間船載試驗(yàn)后,對(duì)該系統(tǒng)的試驗(yàn)數(shù)據(jù)進(jìn)行了離線(xiàn)處理,試驗(yàn)結(jié)果表明,在重力異常變化顯著區(qū)域,運(yùn)載體位置誤差小于1個(gè)重力異常圖網(wǎng)格大小。
1 捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)硬件
本文提出的捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)的激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)由國(guó)防科技大學(xué)研制,主要由3個(gè)90型二頻機(jī)抖激光陀螺儀、3個(gè)高精度擺式撓性加速度計(jì)和轉(zhuǎn)位機(jī)構(gòu)等組成。光纖陀螺捷聯(lián)式重力儀由北京航天控制儀器研究所研制,主要由3個(gè)高精度光纖陀螺儀、3個(gè)高精度擺式撓性加速度計(jì)及精密溫控裝置等組成。計(jì)程儀和深度計(jì)是搭載船只固有的。數(shù)據(jù)采集、組合導(dǎo)航計(jì)算機(jī)和顯示系統(tǒng)由東南大學(xué)研制,數(shù)據(jù)采集系統(tǒng)實(shí)時(shí)記錄激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)、計(jì)程儀、深度計(jì)、光纖陀螺捷聯(lián)式重力儀的輸出信息,導(dǎo)航計(jì)算機(jī)采用現(xiàn)場(chǎng)可編程門(mén)陣列(FPGA)+數(shù)字信號(hào)處理(DSP)+ARM架構(gòu),內(nèi)部存貯數(shù)字重力異常圖,執(zhí)行重力實(shí)時(shí)數(shù)據(jù)處理和慣性/重力匹配計(jì)算任務(wù)。數(shù)據(jù)采集、組合導(dǎo)航計(jì)算機(jī)和顯示系統(tǒng)與其他系統(tǒng)和傳感器的連接關(guān)系如圖1所示。

圖1 捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)框圖
2 重力無(wú)源導(dǎo)航算法
重力無(wú)源導(dǎo)航算法由激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)導(dǎo)航算法、光纖陀螺捷聯(lián)式重力測(cè)量系統(tǒng)導(dǎo)航和重力異常算法、重力匹配算法3部分組成。
2.1 單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)導(dǎo)航算法
激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)的3個(gè)加速度計(jì)和3個(gè)激光陀螺儀與轉(zhuǎn)位機(jī)構(gòu)固聯(lián),加速度計(jì)和陀螺儀輸出經(jīng)誤差補(bǔ)償后投影到載體坐標(biāo)系上,轉(zhuǎn)位機(jī)構(gòu)坐標(biāo)系與載體坐標(biāo)系的旋轉(zhuǎn)角度由轉(zhuǎn)位機(jī)構(gòu)的測(cè)角轉(zhuǎn)置給出。根據(jù)陀螺儀輸出角速度、導(dǎo)航坐標(biāo)系旋轉(zhuǎn)角速度和地球角速度計(jì)算出姿態(tài)矩陣。補(bǔ)償后的加速度計(jì)比力經(jīng)姿態(tài)矩陣變換到導(dǎo)航坐標(biāo)系上,消除有害加速度,再積分可得到速度和位置。激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)導(dǎo)航算法流程如圖2所示。激光陀螺單軸旋轉(zhuǎn)慣性導(dǎo)航系統(tǒng)的姿態(tài)、速度和位置的計(jì)算方法,除轉(zhuǎn)位機(jī)構(gòu)坐標(biāo)變換外,與捷聯(lián)慣導(dǎo)姿態(tài)、速度和位置的計(jì)算方法相同。

圖2 激光陀螺單軸旋轉(zhuǎn)慣性導(dǎo)航系統(tǒng)導(dǎo)航算法流程
2.2 捷聯(lián)式重力測(cè)量系統(tǒng)導(dǎo)航與重力異常算法
要實(shí)時(shí)獲得重力異常值需實(shí)時(shí)知道重力儀的位置、速度和姿態(tài)角。光纖陀螺捷聯(lián)式重力儀主要由3個(gè)相互正交放置的高精度光纖陀螺儀和3個(gè)高精度擺式撓性加速度計(jì)組成。根據(jù)捷聯(lián)式重力儀的陀螺儀輸出角速度和加速度計(jì)輸出比力經(jīng)捷聯(lián)導(dǎo)航算法計(jì)算,就可得捷聯(lián)式重力儀的位置、速度和姿態(tài)角。把激光陀螺單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)提供的位置信息、計(jì)程儀提供的速度信息和深度計(jì)提供的水深信息作為重力測(cè)量系統(tǒng)的觀(guān)測(cè)量,應(yīng)用擴(kuò)展卡爾曼濾波計(jì)算出地理坐標(biāo)系下的比力值。使用低通濾波器對(duì)重力改正后數(shù)據(jù)進(jìn)行濾波得到重力異常值。光纖陀螺捷聯(lián)式重力測(cè)量系統(tǒng)的導(dǎo)航算法與捷聯(lián)慣導(dǎo)參考書(shū)的計(jì)算方法相同。下面只給出光纖陀螺捷聯(lián)式重力測(cè)量系統(tǒng)的濾波方程。
光纖陀螺捷聯(lián)式重力測(cè)量系統(tǒng)濾波狀態(tài)方程為
(1)
式中:Xk為系統(tǒng)狀態(tài)向量;Φk+1/k為狀態(tài)轉(zhuǎn)移矩陣;Γk+1為系統(tǒng)的噪聲轉(zhuǎn)換矩陣;Wk為噪聲矩陣。
狀態(tài)向量為
X=[δvE,δvN,δL,δλ,δh,φE,φN,φU,δGx,
δGy,δGz,δAx,δAy]T
(2)
式中:φE,φN,φU分別為捷聯(lián)慣導(dǎo)數(shù)學(xué)平臺(tái)的3個(gè)誤差角;δvE,δvN分別為東、北向速度誤差;δL,δλ,δh分別為經(jīng)度、緯度和高度誤差;δGx,δGy,δGz分別為陀螺儀x、y、z軸的零位漂移;δAx,δAy分別為加速度計(jì)x、y軸的零位偏置。W由陀螺儀和加速度計(jì)的白噪聲組成:
W=[wgx,wgy,wgz,wax,way]T
(3)
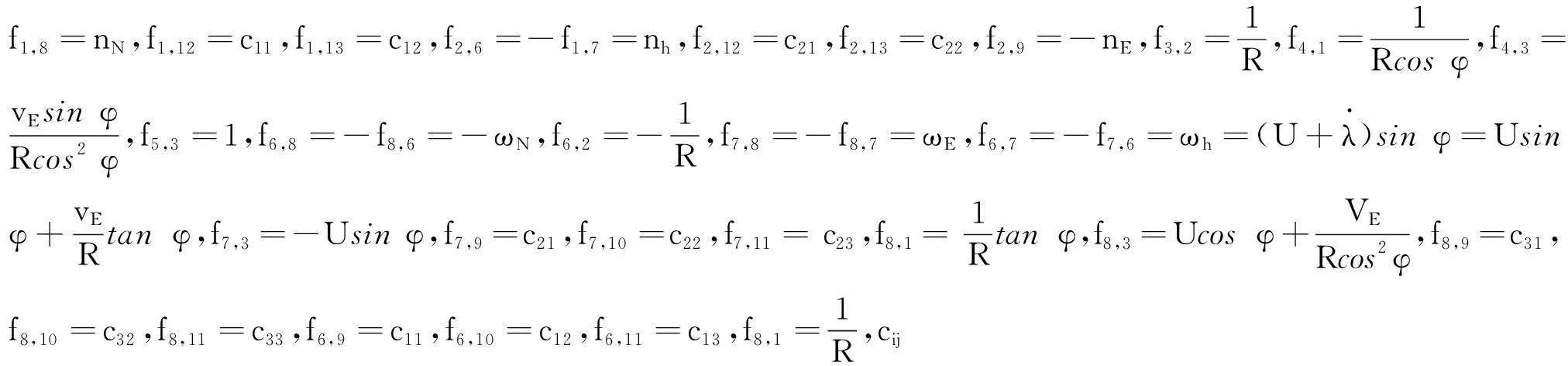
狀態(tài)轉(zhuǎn)移矩陣:
Φk+1/k≈En+Fk·Δt
(4)
光纖陀螺捷聯(lián)式重力測(cè)量系統(tǒng)的觀(guān)測(cè)方程為
Zk+1=Hk+1Xk+1+Vk+1
(5)
式中:Zk+1為觀(guān)測(cè)向量;Hk+1為觀(guān)測(cè)矩陣;Vk+1為觀(guān)測(cè)噪聲矩陣。具體如下:
(6)
式中:vE,I,vN,I分別為捷聯(lián)慣導(dǎo)計(jì)算得到的東、北向速度;vE,DVL,vN,DVL為計(jì)程儀輸出的東、北向速度;LI,λI,hI分別為旋轉(zhuǎn)捷聯(lián)慣導(dǎo)計(jì)算得到的經(jīng)度、緯度和深度;LLG,λLG分別為激光陀螺單軸旋轉(zhuǎn)慣性導(dǎo)航系統(tǒng)給出的經(jīng)度和緯度;hD為深度計(jì)輸出的深度。

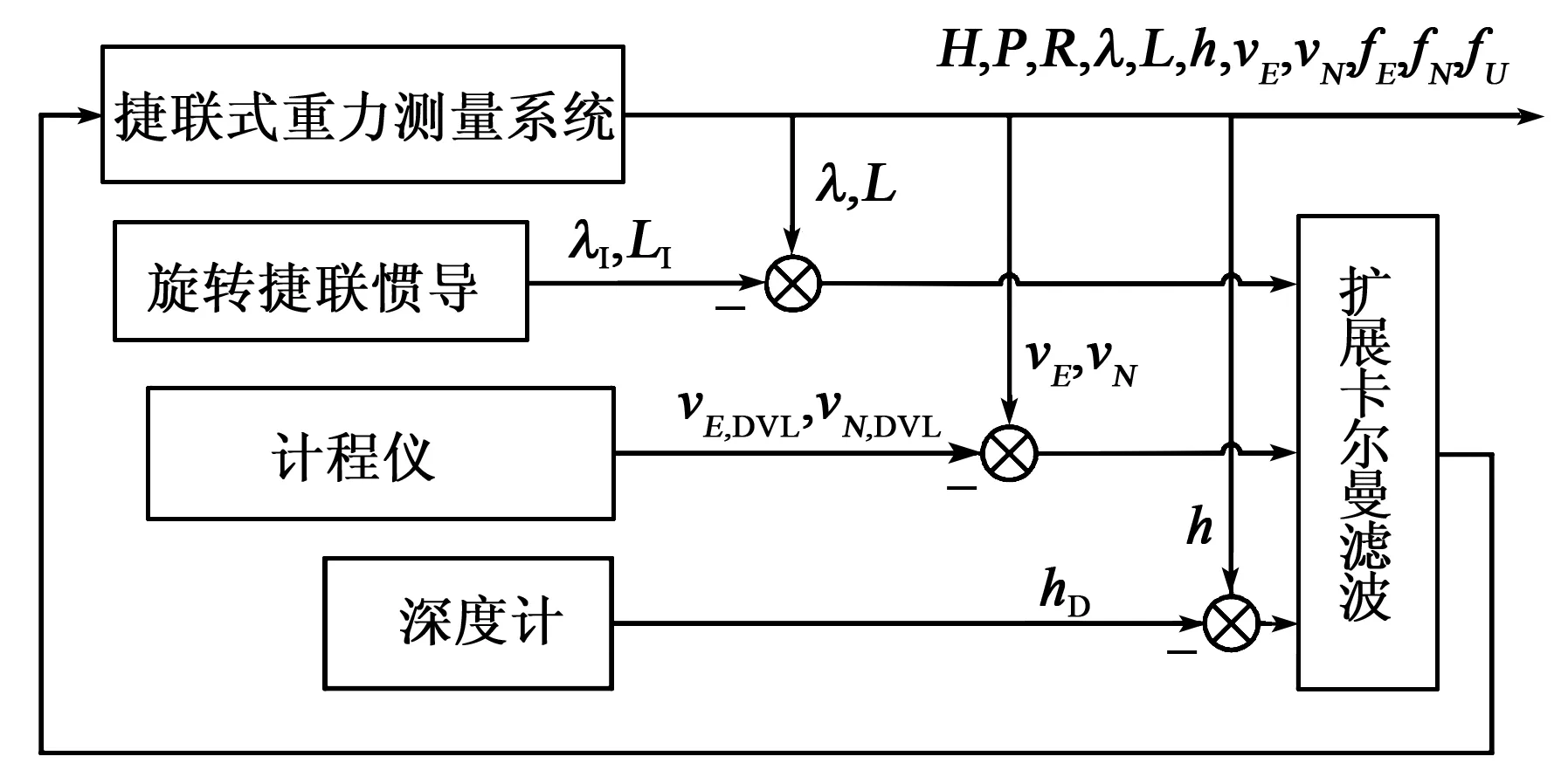
圖3 捷聯(lián)式重力測(cè)量系統(tǒng)觀(guān)測(cè)量與卡爾曼濾波反饋示意圖
得到東、北、天坐標(biāo)系下的加速度計(jì)比力fE,fN,fU后,進(jìn)行重力測(cè)量改正,如厄特弗斯改正、正常重力場(chǎng)改正,最后使用低通濾波消除海浪的影響,可實(shí)時(shí)獲得重力異常值。
2.3 重力匹配算法
根據(jù)捷聯(lián)式重力測(cè)量系統(tǒng)提供的位置信息,在計(jì)算機(jī)里的數(shù)字化重力異常圖上找到對(duì)應(yīng)的重力異常值。把捷聯(lián)式重力測(cè)量系統(tǒng)得到的實(shí)測(cè)重力異常值與計(jì)算重力異常值做相關(guān)分析,得到相關(guān)極值點(diǎn),該點(diǎn)所對(duì)應(yīng)的位置就是匹配后的位置。
Δgt為重力測(cè)量系統(tǒng)實(shí)測(cè)重力異常值,Δgm為數(shù)字重力異常圖上的重力異常值,考慮到捷聯(lián)式重力測(cè)量系統(tǒng)加速度計(jì)零位漂移的影響,用相鄰兩點(diǎn)重力異常的變化量與數(shù)字重力異常圖上對(duì)應(yīng)兩點(diǎn)的變化量作相關(guān)極值計(jì)算,即
(Δgm,i-gm,i-1)]2
(7)
式中:j表示第j路徑;N表示點(diǎn)數(shù)。運(yùn)載體最優(yōu)路徑的計(jì)算是使J(j)最小。
3 試驗(yàn)結(jié)果
2019年底,捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)安裝在某測(cè)量船上進(jìn)行了長(zhǎng)時(shí)間的海上搭載試驗(yàn)。數(shù)據(jù)采集系統(tǒng)記錄下了捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)的全程試驗(yàn)數(shù)據(jù)后,對(duì)該系統(tǒng)試驗(yàn)數(shù)據(jù)進(jìn)行了離線(xiàn)處理,按式(1)~(7)計(jì)算方法,對(duì)某海區(qū)進(jìn)行重力匹配計(jì)算。到達(dá)重力匹配區(qū)時(shí),捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)已連續(xù)工作7天,位置誤差較大。采用上述重力匹配相關(guān)極值法,得到了匹配軌跡。圖4為運(yùn)載體的真實(shí)運(yùn)動(dòng)軌跡、捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)指示軌跡和重力匹配軌跡。為了準(zhǔn)確評(píng)價(jià)匹配點(diǎn)的位置誤差,用GPS位置信息作為參考基準(zhǔn)。匹配點(diǎn)誤差為匹配點(diǎn)到GPS點(diǎn)的距離,導(dǎo)航系統(tǒng)位置誤差為導(dǎo)航系統(tǒng)指示位置點(diǎn)到GPS點(diǎn)的距離。圖5為匹配點(diǎn)誤差與捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)指示位置誤差曲線(xiàn)。試驗(yàn)結(jié)果表明,在匹配海域,運(yùn)載體位置誤差小于1個(gè)重力異常圖格網(wǎng)大小。

圖4 真實(shí)軌跡、導(dǎo)航軌跡和匹配軌跡圖

圖5 匹配點(diǎn)誤差與導(dǎo)航儀位置誤差曲線(xiàn)
4 結(jié)束語(yǔ)
捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)經(jīng)離線(xiàn)船載試驗(yàn)數(shù)據(jù)驗(yàn)證,在匹配區(qū)域內(nèi)該系統(tǒng)的位置誤差小于1個(gè)重力異常圖格網(wǎng)值。捷聯(lián)式重力無(wú)源導(dǎo)航系統(tǒng)具有長(zhǎng)航時(shí)、高精度、成本低的優(yōu)點(diǎn),可作為水下自主導(dǎo)航設(shè)備,可廣泛應(yīng)用于海洋探索和開(kāi)發(fā)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32