TWUSM振動模態魯棒滑模觀測器研究
2020-10-29 01:12:30林夏萍
壓電與聲光 2020年5期
荊 鍇,林夏萍,董 硯
(1.河北工業大學 人工智能與數據科學學院,天津 300401;2. 河北省控制工程技術研究中心,天津 300130)
0 引言
行波型旋轉超聲電機(TWUSM)是利用定子上壓電陶瓷片的逆壓電效應,施加高頻電壓激勵時產生高頻振動,引起定子表面質點的橢圓運動。由于定、轉子受到預壓力作用相互接觸,定子表面質點的橢圓運動將對轉子產生摩擦力,驅動轉子旋轉運動,該過程通過定子微觀運動實現能量轉換,伴隨嚴重非線性特征,且定子狀態難以觀察。
早期TWUSM控制技術的發展主要集中在基于系統級輸出量(如轉子轉速、轉矩)進行控制器設計研究[1-3],但從電機驅動機理可知,兩相振動模態是產生行波、驅動電機運行的關鍵,直接影響電機控制性能,然而以定子振動模態進行電機優化、控制還較少。已有研究利用變壓器電橋電路[4]、形變檢測傳感器[5]、高速攝像頭[6]等測量振動特性,用來分析電機狀態及提供控制補償。但這些裝置復雜且不易安裝,利用觀測器對狀態量進行獲取則是更好的選擇,早期研究中提出,根據定子等效電路模型構建兩相振動模態觀測器方法的進行觀測[7],但未做深入研究。
針對超聲電機具有強非線性、參數不穩定等特征,本文提出了一種利用具有強魯棒性、強抗擾性的滑模觀測器[8]的振動模態觀測器設計方法,并基于此通過振動模態的優化,改善電機的運行性能。
1 TWUSM運行機理分析
TWUSM在兩相等頻等幅相位差為π/2的正弦激勵電壓u=[uAuB]T下定子產生兩相振動模態w=[wAwB]T,且滿足機電耦合方程及壓電振子方程:
(1)
(2)
式中:m,d,c,Θ分別為定子兩相的模態質量、模態阻尼、模態剛度及機電耦合系數;fc為定轉子相互作用產生的模態力;Rd,Cd分別為兩相壓電振子的介電損耗電阻和靜態電容;i= [iAiB]T為相電流。
激勵作用下定子產生兩相振動模態,并在定子中合成一列行波,只有當wA和wB等幅正交時,合成理想型波,即
w=wAsin(kθ)+wBcos(kθ)=
Wsinωtsin(kθ)+Wcos(ωt)cos(kθ)=
Wcos(kθ-ωt)
(3)
式中W為A、B兩相振動模態的幅值。由于制作工藝、環境影響等無法獲得理想的對稱定子,導致定子中激發的兩相振動模態并不嚴格等幅正交,使得合成行波中夾雜一定的駐波,進而帶來轉矩脈動及多余的損耗,降低了電機精密驅動性能。
兩相振動模態對于電機高精度控制具有重要意義,但振動模態不易測量,下面將設計魯棒滑模觀測器對其進行估計。
2 振動模態滑模觀測器設計
2.1 TWUSM振動模態狀態方程
(4)

考慮超聲電機參數測量誤差及易受環境影響而改變,參數c,d,m存在的不確定性影響電機運轉,實際的系數矩陣可寫成:
(5)
系統的不確定性產生的影響與模態力是同維度的,可合并為一項(h(t,x,u)),并一定有界 |h(t,x,u)| ≤D,且有:
h(t,x,u)=Δb2u+ΔA21x1+ΔA22x2+
(6)
另表示狀態方程為
(7)
系統存在不確定性項,設計滑模觀測器需要考慮其影響,并做出恰當設計以克服系統不確定性。
2.2 滑模觀測器設計
滑模觀測器利用觀測輸出與實際輸出偏差的開關函數形式返回輸入端,使輸出偏差快速逼近0,從而達到觀測系統快速逼近實際系統的目的,獲得準確的觀測值。
針對上述系統,設計如下觀測器:
(8)
式中Gn=[L-1]TL為用戶設計量。
(9)
-|ey|(ρ-|A21e1+A22ey+h(t,x,u)|)≤ -|ey|(ρ-|A21e1+A22ey+D|)
(10)
當ρ>|A21e1+A22ey+D|時,系統可到達滑模面。到達滑模面后,ey=0:
(11)
簡化式(11)為
(12)
利用觀測得到的電機兩相振動模態來調節電機兩相輸入電壓的幅值和相位,從而改善兩相振動模態,使其等幅正交,進而優化電機輸出轉矩的性能,減小脈動,降低損耗。
3 仿真與實驗
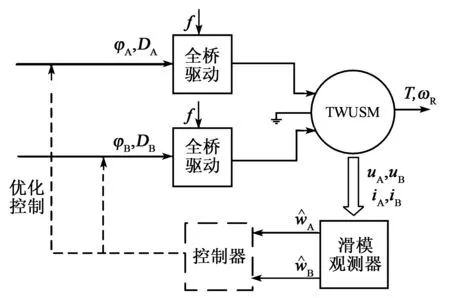
圖1 TWUSM基于滑模觀測器的控制框圖
3.1 滑模觀測器性能仿真分析
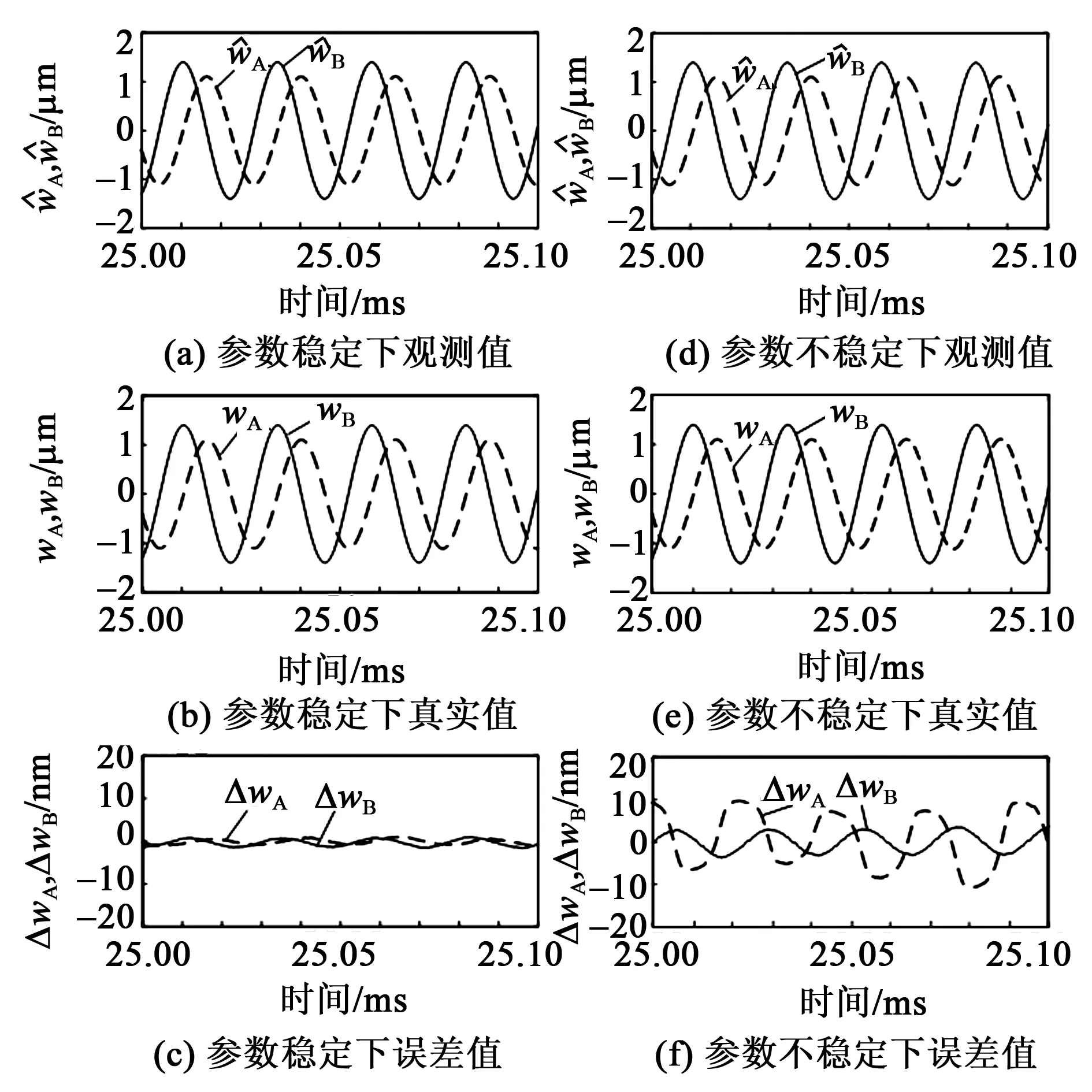
圖2 穩態下兩相振動模態曲線、觀測曲線及誤差曲線
根據所觀測的振動模態,調節全橋驅動電路兩相方波電壓的占空比,實現振動模態的等幅正交。圖3(a)、(b)和(d)、(e)分別為調節前、后相電壓、振動模態曲線。由圖可看出,調節前,A、B兩相模態幅值分別為1.111 μm和1.408 μm,且相位接近π/2;調節后,A、B相方波電壓占空比分別為45%和29%,達成相電壓調節,實現優化兩相模態(見圖3(e)),A、B相振動模態幅值分別為1.211 μm和1.215 μm,且相位接近π/2。圖3(c)、(f)為調節前、后電機輸出轉矩曲線,調節前轉矩曲線在(-0.4 N·m, 0.2 N·m)之間變化,調節后轉矩曲線在(-0.05 N·m, 0.04 N·m)之間變化,達到優化效果,即轉矩脈動明顯減小,提高電機輸出精度。
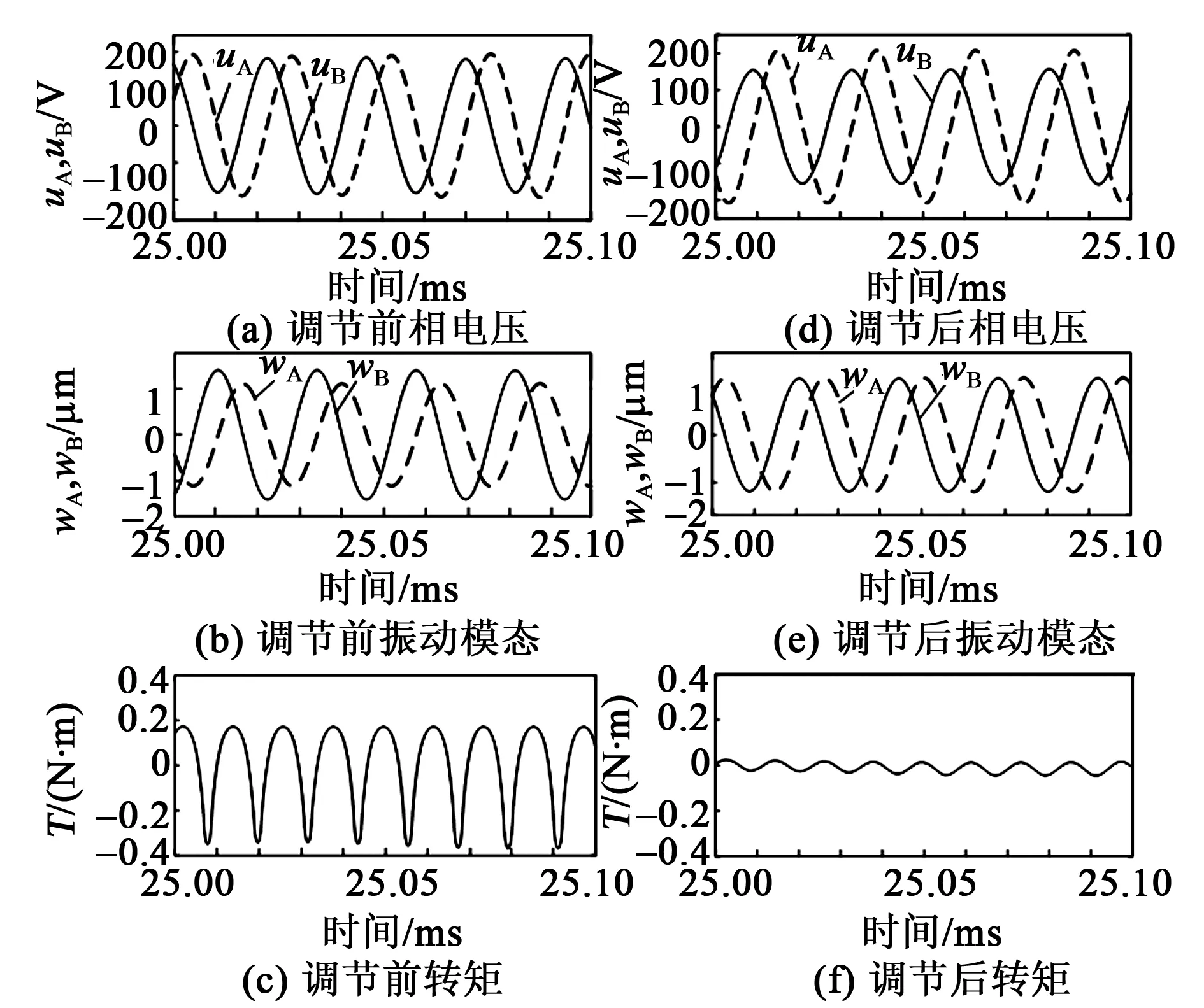
圖3 優化控制前、后的相電壓、振動模態及輸出轉矩曲線
以上通過仿真驗證滑模觀測器的準確性及魯棒性,并驗證基于滑模觀測的優化控制,改善電機輸出轉矩脈動的可行性,需要進一步進行實驗驗證。
3.2 基于振動模態觀測器的電機轉矩優化實驗分析
實驗平臺如圖4所示,本文通過現場可編程門陣列(FPGA)調節全橋驅動電路方波占空比實現對電機的驅動,并以此實現、驗證本文提出的滑模觀測器有效,且實現振動模態優化。定子振動模態無法精確檢測,但可以通過觀察輸出轉矩脈動間接證明基于觀測器輸出實現的優化控制有效。
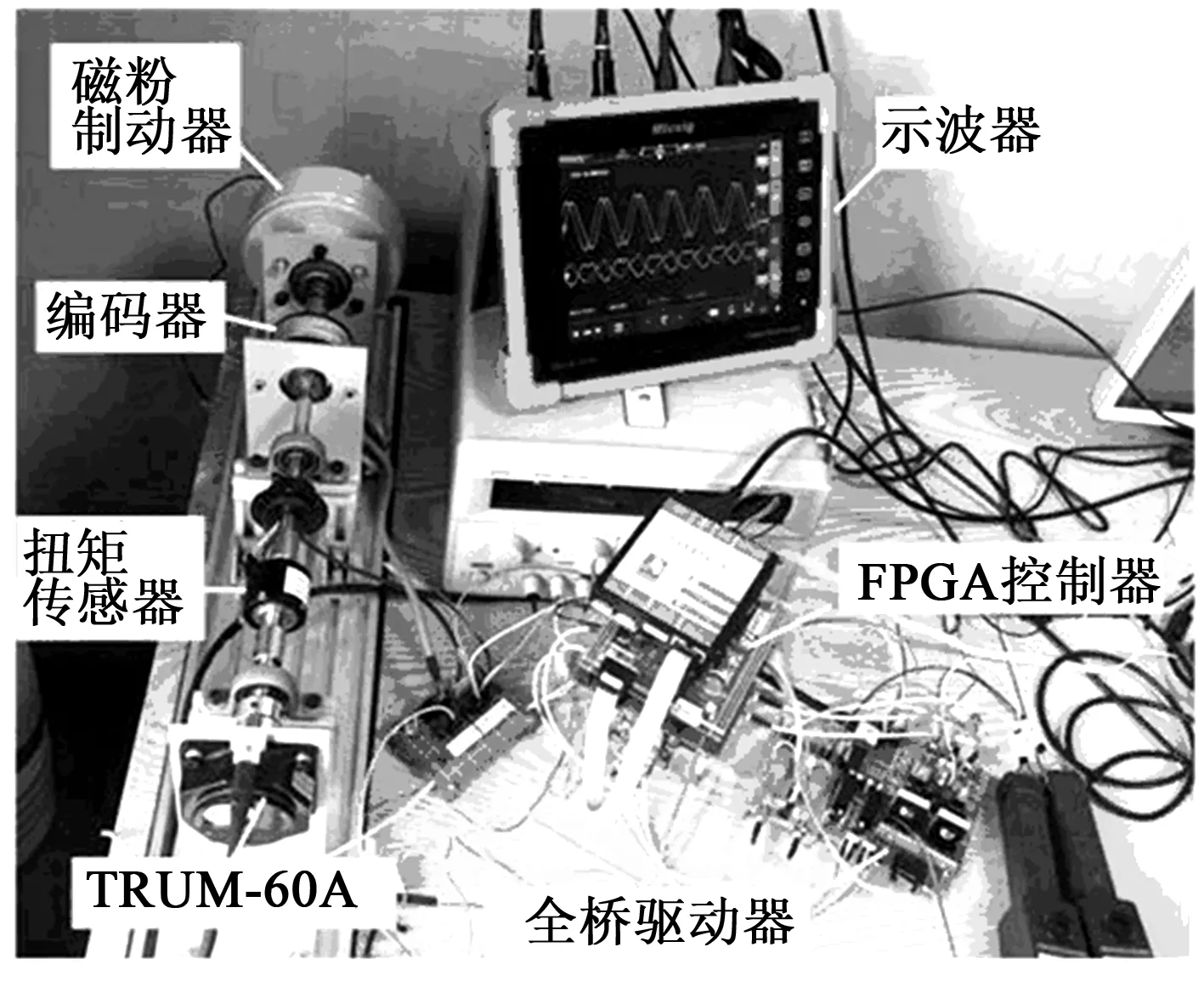
圖4 基于FPGA的TWUSM全橋驅動控制實驗平臺
圖5為穩態電壓驅動與基于振動模態調節驅動電路占空比的兩種控制方式下的相電壓與輸出轉矩曲線。對比調節前、后電機相電壓、輸出轉矩,轉矩脈動區間由(-0.62 N·m, 0.49 N·m)減小至(-0.36 N·m, 0.28 N·m),得到改善,說明實驗中對A/B相電壓由180 V/196 V調節至212 V/152 V是有效調節,證明定子振動模態得到一定程度改善以及基于相電流搭建滑模觀測器可靠。前文提到TWUSM由于工藝、環境等原因參數無法嚴格對稱,導致等幅正交電壓無法產生等幅正交振動模態,且實驗過程中對于電壓的調節趨勢為兩相電壓幅值差變大,與此相互印證,優化振動模態的研究思路具有研究價值。
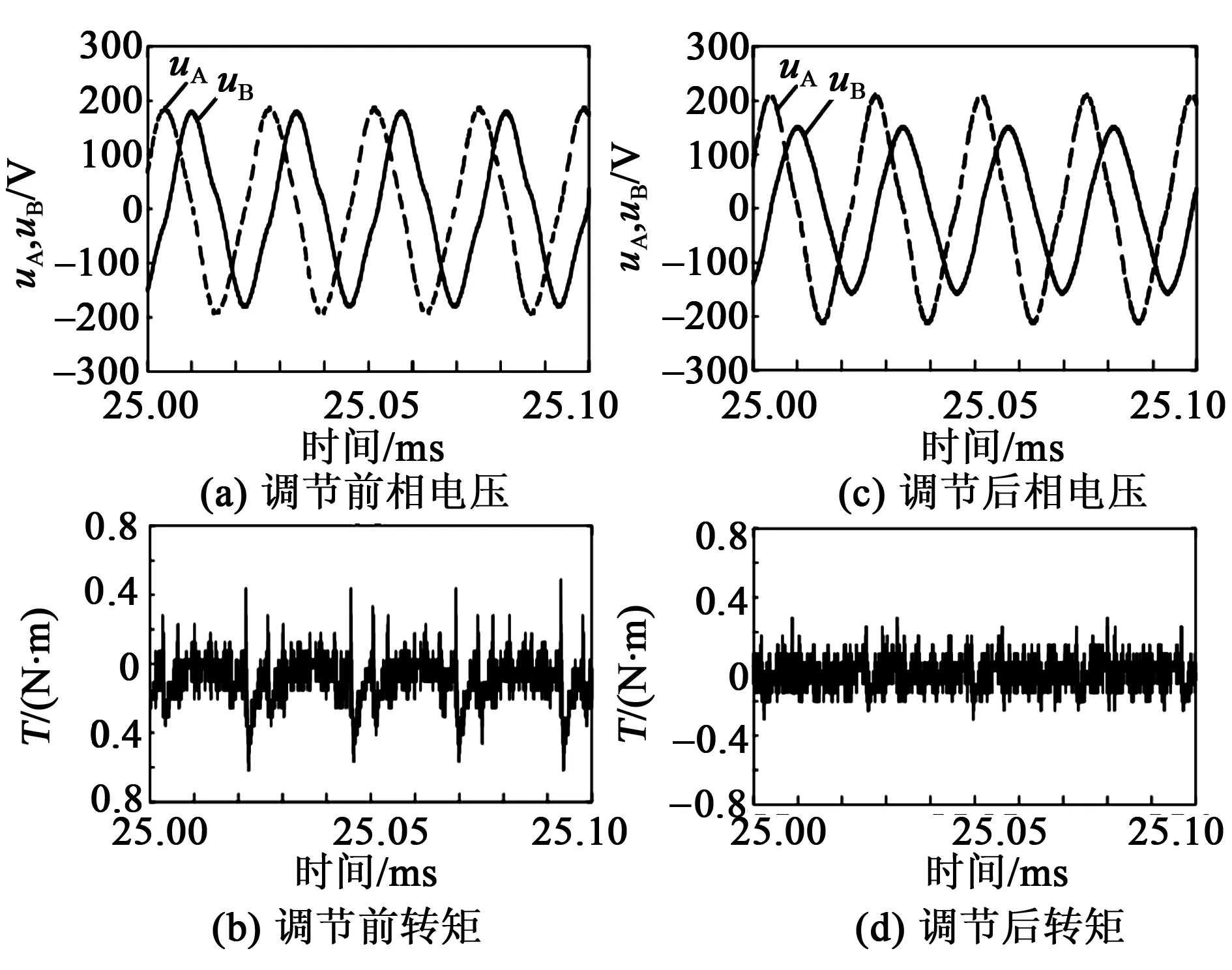
圖5 優化控制前、后電壓及輸出轉矩曲線
4 結束語
通過對TWUSM驅動機理分析,考慮TWUSM具有的參數不確定性和嚴重非線性帶來轉矩脈動等問題,針對產生驅動的高頻振動環節構建了具有魯棒性的振動模態滑模觀測器,本文對滑模觀測器的穩定性和魯棒性進行了理論分析和仿真驗證。結果表明,滑模觀測器可實現對振動模態的準確觀測,且具有參數魯棒性,并分析了調整電壓實現振動模態優化控制的可行性。最后通過仿真和實驗驗證了基于振動模態滑模觀測器對兩相電壓進行優化調節可有效改善輸出轉矩脈動。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44