光纖陀螺溫變效應誤差抑制方法研究
2020-10-28 05:05:30路彬彬張登偉
壓電與聲光 2020年5期
關鍵詞:效應
李 陽,黃 鑫,路彬彬,張登偉
(1. 南京電子技術研究所,江蘇 南京 210000;2. 浙江大學 光電科學與工程學院 現代光學儀器國家重點實驗室,浙江 杭州 310027)
0 引言
光纖陀螺(FOG)是慣性導航領域中的重要傳感器,其高精度、全固態、啟動快及動態范圍大等優點符合當前軍事應用的需求。目前由于溫度場導致的非互易性零偏漂移誤差限制了光纖陀螺精度的進一步提升[1-5],Lefevre將這一現象稱為光纖陀螺溫變效應誤差[6-7],因此,解決這一問題已成為光纖陀螺進一步發展的關鍵。
溫變效應誤差的抑制方法有硬件優化和軟件補償。硬件優化主要通過改善熱結構設計,增加溫控[8],采用新的光纖環繞法[9-10]和工作原理[11-12]等方法實現,但會帶來質量、體積增加,工藝復雜,光纖環結構強度下降等問題。軟件補償法易于工程實現,且抑制效果較好,其中線性誤差模型[13-15]易于工程應用,但依賴于精確的誤差模型和溫度信息。采用神經網絡等機器學習方法[16-17]可自適應進行最優模型識別,但受限于機上/彈上計算機運算資源,一般應用于非實時的數據后處理場合。通過經驗模態分解,結合曲面擬合回歸和自適應模糊推理聯合建模的方法,可獲得較好的補償效果[18]。查表補償法[19]具有實現簡單,無需精確建模,實時性和補償效果好的優點,具有很大的工程應用潛力。
本文通過光纖陀螺溫變效應誤差的原理分析與建模,提出基于查表法的啟動溫變效應誤差抑制方法。通過實驗驗證其誤差抑制效果,提供了一種有效的實時工程應用方案,對提升光纖陀螺的精度水平和系統應用性能具有重要意義。
1 方法原理
1.1 光纖陀螺溫變效應誤差模型
光纖陀螺溫變效應誤差體現為光纖陀螺內部溫度場變化時的輸出漂移誤差,由廣義Shupe效應、標度因數的溫度效應和檢測通道的溫度效應組成,其中后兩種效應可通過標度因數溫度標定、半波電壓閉環控制和選擇低溫度系數電子元器件得到很好抑制。因此,光纖陀螺溫變效應誤差主要來源為廣義Shupe效應,其誤差模型如圖 1所示(圖中Δφs=Ω·Ko為薩格奈克相位差),對應光纖陀螺的輸出為
D=(Ω·Ko+Δφe)·Ke
(1)
式中:Ω為輸入旋轉角速率;Ko、Ke為光學、電學標度因數; Δφe為廣義Shupe效應引起的加性溫變效應相位誤差。
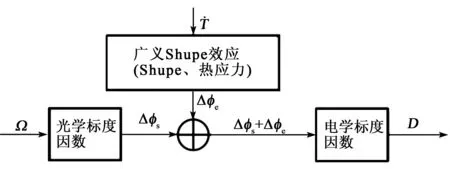
圖1 光纖陀螺溫變效應誤差源
廣義Shupe效應包括傳統的Shupe效應及熱應力效應,具體表示為
z,t)]·(L-2z)dz
(2)
由式(2)可知,當光纖環中相對光纖中點對稱位置的溫變速率相同時,即可消除廣義Shupe效應誤差。目前工程上采用四極對稱繞法光纖環來抑制廣義Shupe效應,但由于光纖直徑限制,各層光纖間并非理想的關于光纖環中點對稱,存在殘余的溫變效應誤差,在高精度光纖陀螺中不可忽略。
1.2 光纖環等效非穩態溫度場分析
已知各個時刻光纖環溫度場分布,即可根據式(2)得到溫變效應誤差。光纖環各層光纖緊密纏繞,可看作一個性質均勻的整體,其主要的熱傳遞方式是熱傳導。同時光纖環熱分布為環形對稱形式,且在軸向上均勻分布,可只針對光纖環截面進行二維熱傳導分析。建立簡化的一維光纖環分析模型如圖 2所示。圖中,d為光纖環光纖截面寬度,內壁、外壁分別位于面向熱源和背向熱源的一側。
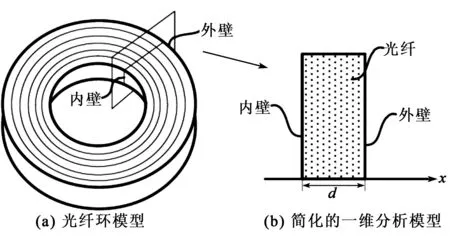
圖2 簡化一維光纖環分析模型
對于系統應用中的光纖陀螺,光纖環外部還包含有隔熱層、外殼結構及外部的系統結構,可等效為多個導熱特性不同介質層的疊加并看作一個整體。光纖陀螺啟動后在有限時間段內,光纖環內表面所受熱作用可看作只滲透到有限厚度范圍內,可等效為“半無限大物體”,對應的等效模型如圖 3所示。圖中R為光纖環內側半徑。
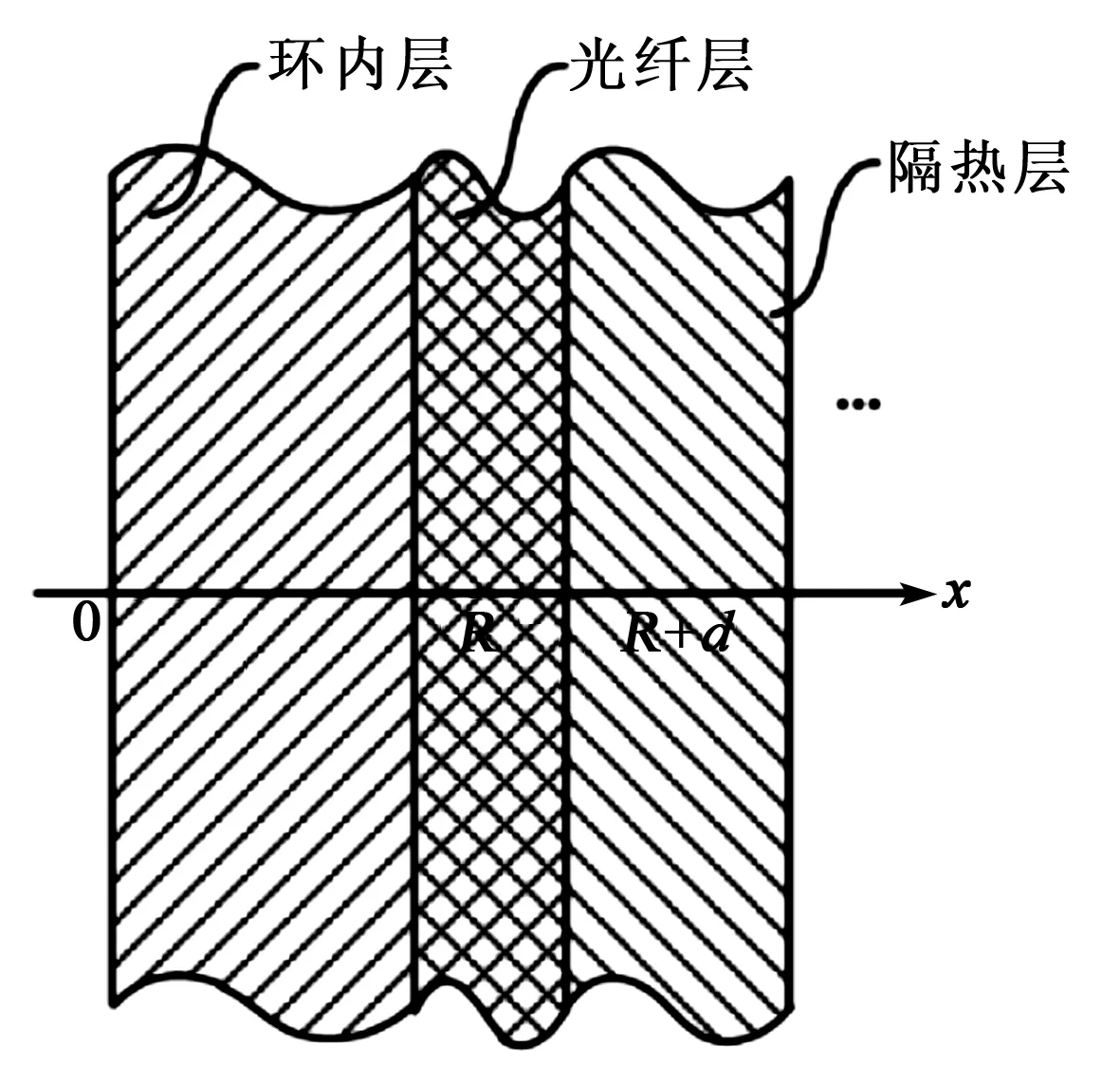
圖3 光纖環半無限大物體等效分析模型
光纖陀螺初始溫度為T0,啟動時x=0位置處的邊界溫度突然提高到Tw并保持不變。引入過余溫度θ=T-T0(T為光纖環內的溫度),結合一維導熱微分方程獲得光纖環非穩態導熱問題的數學描述為
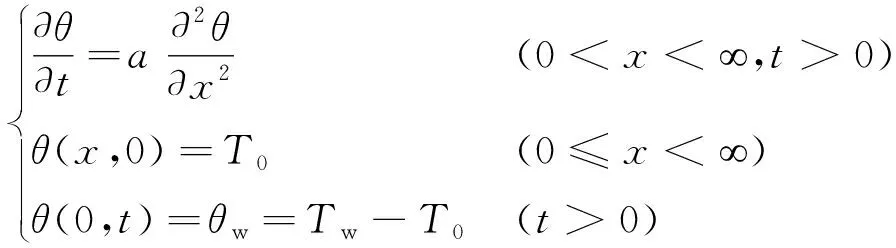
(3)
式中:a為熱擴散系數;t為時間。初始條件為T(x,y,z,0)=T0。式(3)的解為
(4)
各個位置處溫度的時間梯度為
(5)
將式(5)代入式(2)可獲得光纖陀螺啟動過程的溫變效應誤差模型,下面基于四極對稱光纖環進行誤差模型的推導與查表法抑制原理的闡述。
1.3 光纖陀螺溫變效應查表法抑制原理

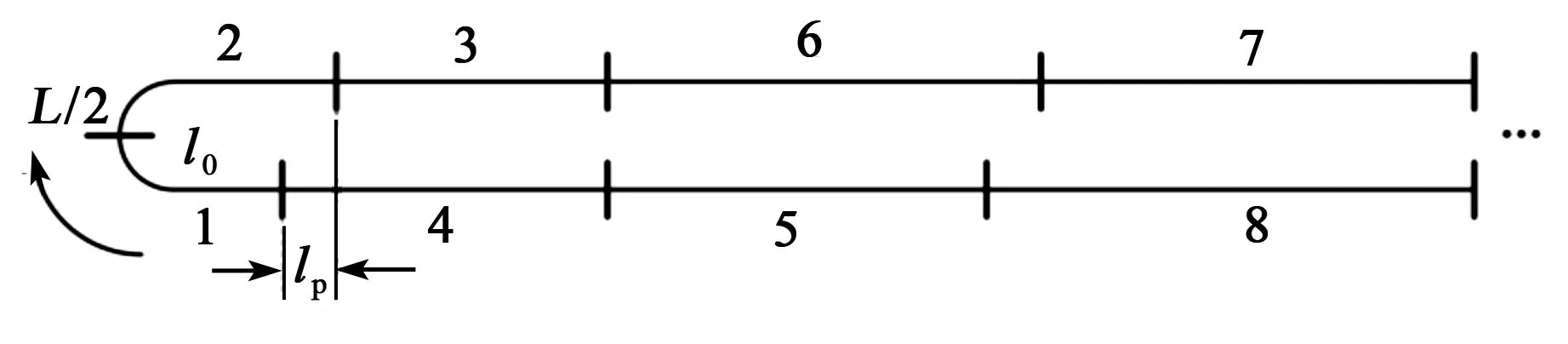
圖4 四極對稱繞法光纖環層分布示意圖
根據式(2)可得離散化廣義Shupe誤差為
[lend(q,m)-lstart(q,m)]·
[L-lend(q,m)-lstart(q,m)]
(6)
式中lstart(q,m),lend(q,m)分別為第q個極子中第m層光纖的起點與終點坐標。將常數項進行合并可得:
(7)
根據式(5)可得溫度時間梯度為時間t的單一變量函數:
(8)
可將式(7)進一步寫為
(9)
因此,光纖陀螺啟動過程的溫變效應導致的相位誤差為時間t的復雜函數,幅值由θw決定。在不同啟動溫度環境下,光纖陀螺內部熱源不同的發熱功率對應不同的邊界過余溫度,因此,幅值θw取決于啟動時的環境溫度T0。在不同啟動溫度環境下,溫變效應誤差具有相同時間變化趨勢,只是具有不同的幅值。因此式(9)可改寫為
Δφe(t)=θw(T0)·f(t)
(10)
式中:θw(T0)為溫變效應誤差幅值系數;f(t)為溫變效應誤差時間函數。
基于上述分析,可確定光纖陀螺啟動溫變效應誤差的查表法抑制原理:通過實驗獲得不同標定啟動環境溫度Ti下的光纖陀螺啟動溫變效應誤差,采用時間表格方法建立式(10)形式的時間函數F(t,Ti)。在光纖陀螺啟動時,按照啟動環境溫度T和啟動時間查詢對應的時間表格,獲得對應溫變效應誤差,并在光纖陀螺輸出數字量中加以補償,從而實現啟動溫變效應誤差的抑制。
實際工程應用中,T≠Ti,根據溫變效應誤差模型可認為在一定溫度范圍內θw與環境溫度成線性關系,此時可以取相鄰最近的兩個溫度標定點Ti和Ti+1下的時間表格F(t,Ti)和F(t,Ti+1),根據溫度值進行等比例插值獲得T下的時間表格為
F(t,Ti)
(11)
1.4 光纖陀螺溫變效應誤差評價方法
為對溫變效應誤差抑制效果進行評估,需要統一的方法對誤差進行量化。可參考慣導系統的圓概率誤差(CEP)精度評估方法[20],計算光纖陀螺的漂移概率誤差(DEP)。對光纖陀螺數據進行角度積分,將積分結果歸化至1 h,獲得每個采樣時刻ti的漂移率為
(12)
式中θ(ti)為ti時刻的角度積分值。
ΩER服從均值為0,標準差為σ的一維正態分布,漂移概率誤差ΩDEP(95%)為1.96σ,σ使用漂移率標準差估計值代替。光纖陀螺的漂移概率誤差計算過程中使用角度積分值進行計算,避免了白噪聲的影響,可直接量化評估溫變效應誤差。
另外,慣導系統的位置精度是反映其性能的重要指標,而光纖陀螺的漂移誤差會直接導致導航的位置誤差,因此,可直接采用系統位置誤差進行誤差評估。將光纖陀螺漂移數據代入導航解算過程,導航結果中僅包含有光纖陀螺漂移所帶來的導航誤差。根據慣導系統精度評定方法獲得導航圓概率誤差,反映了溫變效應誤差對系統誤差的貢獻。
綜上所述,光纖陀螺漂移概率誤差與慣導系統圓概率誤差是溫變效應誤差的有效量化評估手段。在后續的實驗數據分析中,采用DEP與系統CEP對溫變效應誤差進行評估。
2 實驗結果與分析
實驗中,采用溫箱控制環境溫度進行-40~+60 ℃的環境溫度控制。溫箱放置在隔振地基上,光纖陀螺靜態放置于溫箱內部。光纖陀螺采用穩壓電源進行供電,輸出數據通過串口發送至上位機,通過數據采集軟件進行光纖陀螺輸出數據的接收。整體實驗裝置示意圖如圖 5所示。
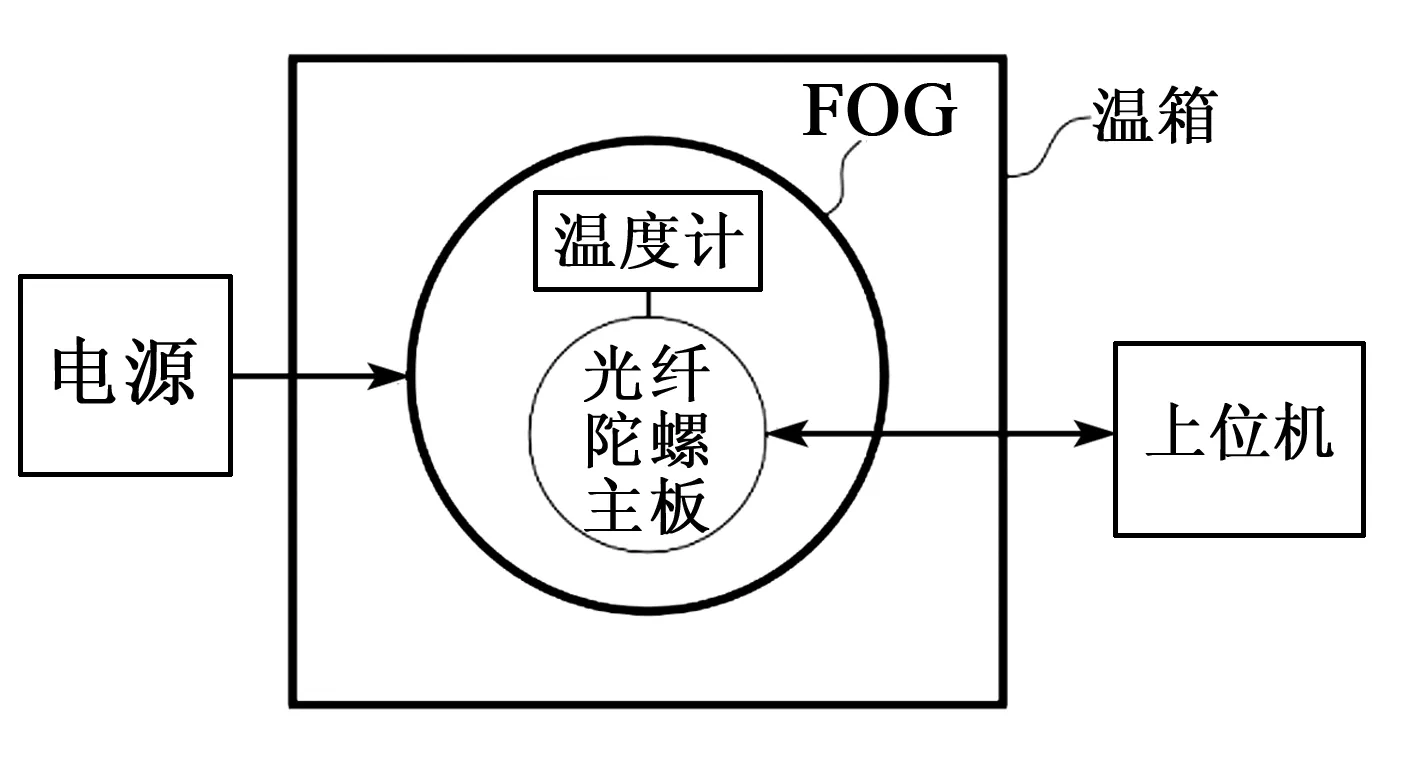
圖5 實驗裝置示意圖
為獲得各個啟動溫度下的光纖陀螺啟動溫變效應抑制表格,同時驗證各溫度點下光纖陀螺啟動溫變效應誤差查表法抑制效果,進行零狀態重復啟動實驗。設置一固定的環境溫度,對陀螺進行斷電4 h、通電2 h的啟動測試,每個溫度測試4組數據。在每個溫度點下,對多組啟動數據按照時間點進行平均后進行中心滑動平均,獲得一組噪聲抑制后的光纖陀螺零狀態啟動趨勢數據。根據第1.1節中光纖陀螺溫變效應理論,當光纖陀螺內部溫度場達到穩態時,其溫變效應誤差為0,因此,可以認為光纖陀螺啟動測試數據中末段為不包含溫變效應誤差的輸出。將光纖陀螺零狀態啟動數據減去數據末段的平均值,即獲得該溫度點下光纖陀螺溫變效應誤差抑制表格,流程如圖 6所示。
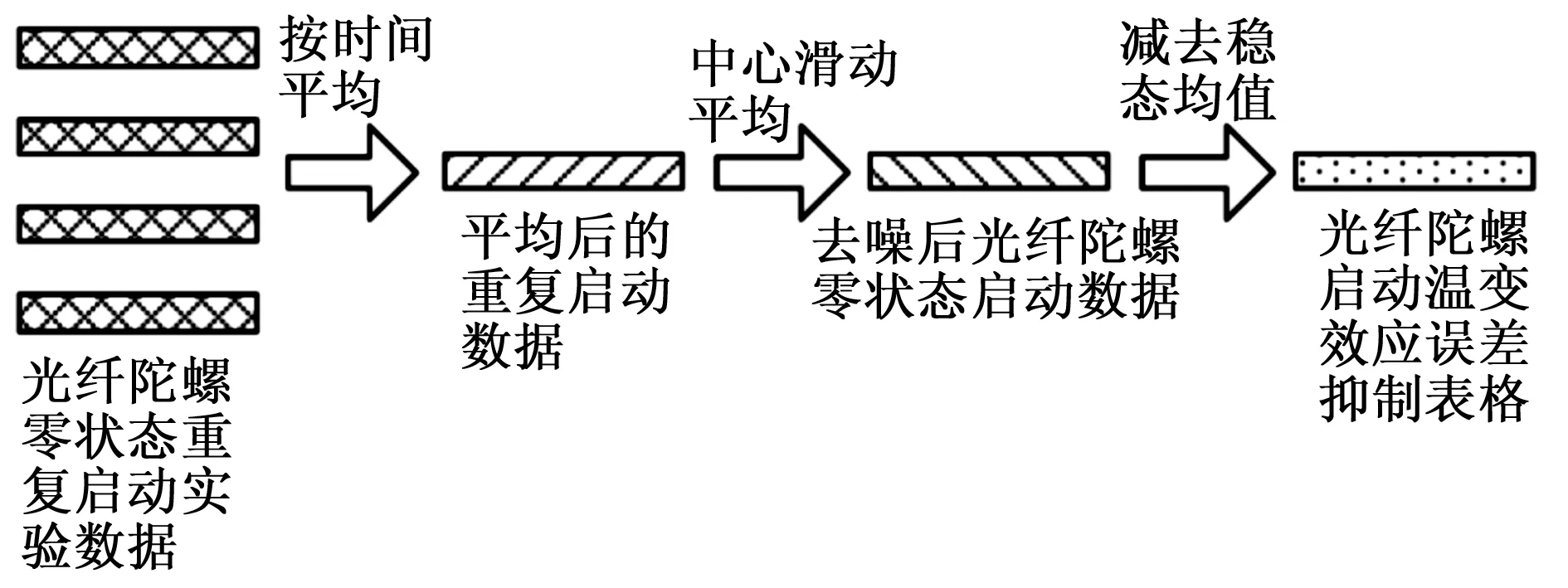
圖6 誤差抑制表格計算流程
根據誤差抑制表格,對光纖陀螺零狀態啟動輸出數據進行實時溫變效應誤差抑制。圖 7為20 ℃條件下誤差抑制前、后的光纖陀螺啟動數據對比。
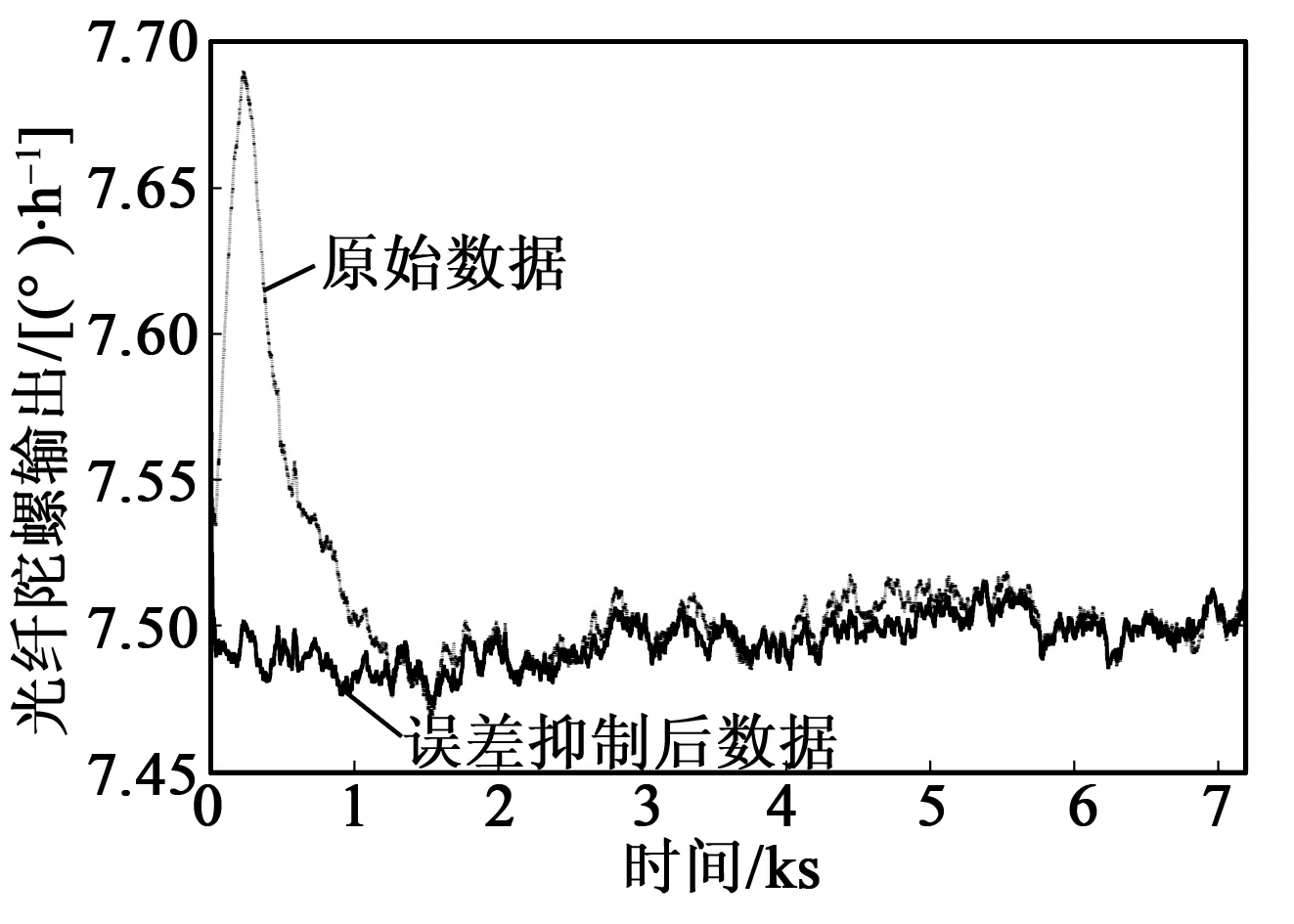
圖7 20 ℃環境下誤差抑制前、后對比
根據第1.4節中的溫變效應誤差評價方法計算誤差抑制前、后的DEP和導航CEP,如表 1所示。誤差抑制后DEP由0.10~0.12 (°)/h下降為0.004~0.006 (°)/h,誤差剩余比小于6%。導航CEP從7~9 n mile/h降至0.5 n mile/h以下,誤差剩余比小于7%。同時DEP指標與導航CEP指標成正相關。
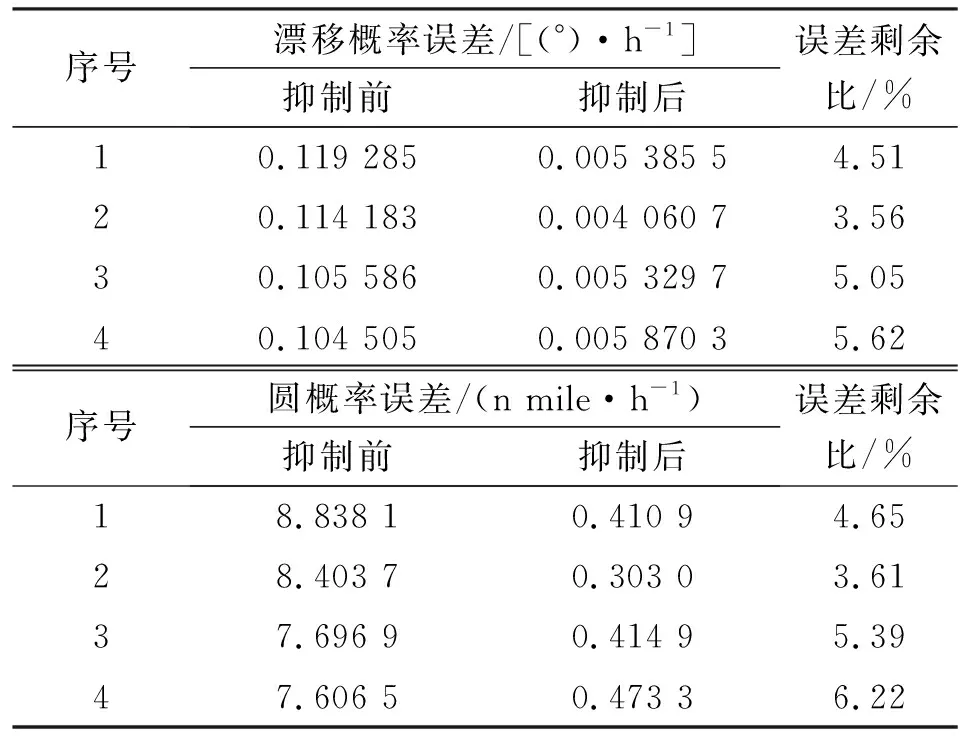
表1 20 ℃條件下誤差抑制前、后的漂移概率誤差與導航圓概率誤差
為驗證光纖陀螺溫變效應誤差模型在全溫范圍內的適應性,進行了全溫條件下的光纖陀螺溫變效應誤差抑制實驗。以10 ℃為間隔,在-40~60 ℃設置11個環境溫度點進行光纖陀螺靜態啟動測試,測試時間為2 h。實驗中,每次溫箱調整溫度后,對陀螺進行大于4 h的冷卻,以保證陀螺內部溫度場充分穩定。各個環境溫度點下的測試數據表明,光纖陀螺溫變效應誤差在不同環境溫度下的幅值不同,通過各個溫度下的光纖陀螺啟動溫變效應誤差抑制表格加以補償后,溫變效應誤差下降較大。計算各個溫度點下誤差抑制前、后光纖陀螺的DEP與導航CEP指標,如圖 8所示。
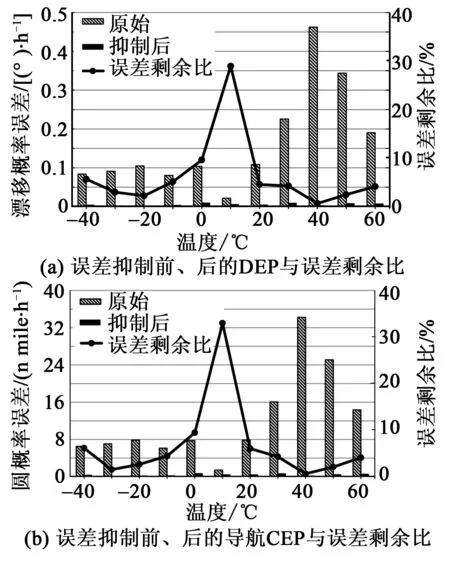
圖8 全溫條件下誤差抑制前、后實驗結果
由圖8(a)可看出,溫變效應誤差模型在不同溫度下的光纖陀螺DEP抑制效果不同,在40 ℃下抑制比最高,DEP誤差剩余比為0.63%,而10 ℃下抑制比最低,DEP誤差剩余比為28.94%。在10 ℃下,光纖陀螺自身的溫變效應誤差較小,原始光纖陀螺數據DEP為0.021 424 (°)/h,經過誤差抑制后為0.006 200 (°)/h,因此,誤差抑制比較小。對比圖 8(b)、(a)可看出,導航CEP指標溫度分布與光纖陀螺DEP指標相似,且兩者誤差剩余比也具有相同的趨勢。在全溫范圍內,光纖陀螺DEP從0.02~0.5 (°)/h下降到小于0.01 (°)/h,而對應的導航CEP從1.4~35 n mile/h下降到小于0.8 n mile/h。
實驗結果表明,通過應用光纖陀螺溫變效應誤差抑制法,常溫條件下光纖陀螺DEP從0.10~0.12 (°)/h降至為0.004~0.006 (°)/h,對應導航CEP從7~9 n mile/h降至0.5 n mile/h以下;在全溫度范圍內,光纖陀螺DEP從0.02~0.5 (°)/h降至0.01 (°)/h以下,導航CEP從1.4~35 n mile/h降至小于0.8 n mile/h。該方法對光纖陀螺的溫變效應誤差具有有效的抑制作用,具有良好的一致性與全溫度范圍內的適應性,可有效降低由于溫變效應導致的光纖陀螺漂移誤差,提升對應導航系統精度。
3 結束語
本文根據光纖陀螺溫變效應誤差機理,結合光纖環等效非穩態溫度場分析,獲得了啟動狀態下溫變效應誤差等效數學模型。等效數學模型中的幅值系數僅與環境溫度有關,并對于狀態固定的光纖陀螺其時間函數保持不變,根據這一特點提出了基于查表法的光纖陀螺溫變效應誤差抑制方法。同時根據光纖陀螺的數據特征與系統應用特點,提出了采用漂移概率誤差和導航圓概率誤差對溫變效應誤差進行量化評估。開展了全溫條件下溫變效應誤差抑制實驗,實驗中獲得了90%以上的誤差抑制效果,全溫環境下系統導航定位誤差從最大34.221 3 n mile/h降至0.730 4 n mile/h。實驗結果表明,通過該文誤差抑制方法的應用,有效抑制了光纖陀螺溫變效應誤差,提升了相應的系統性能,具有很強的工程應用價值。
此外,當考慮更惡劣的應用環境時,外界環境為變溫條件,根據溫變效應誤差模型,其內部的熱傳導過程相當于一個時變邊界條件的傳熱過程,若仍采用固定溫度下的誤差抑制表格會導致較大的剩余誤差。此時可通過標定獲得的環境溫度與誤差抑制表格幅值系數間的關系,根據外界環境溫度實時調整幅值系數,以逼近變溫條件下的溫變效應誤差。變溫條件下的溫變效應誤差抑制,需要進一步試驗研究,是后續研究的重點方向。
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
小學生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
科學大眾(2020年17期)2020-10-27 02:49:10
紅土地(2018年11期)2018-12-19 05:10:56
意林·全彩Color(2018年9期)2018-11-13 22:49:38
中學物理·高中(2016年12期)2017-04-22 11:53:03
中國衛生(2016年4期)2016-11-12 13:24:14
中國衛生(2014年4期)2014-12-06 05:57:14
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30