
基于最優參考曲面的多波束自動濾波方法研究
2020-11-02 09:35:16戴紅偉嚴懷志李煒
航海 2020年5期
戴紅偉 嚴懷志 李煒
摘要:針對多波束水深數據噪點成因復雜的特點,本文提出了一種基于最優參考曲面的多波束自動濾波方法。通過對不同形態的水下地形構建最優參考曲面,計算出每個波束點的理論最優深度值,再結合深度限差判定該點是否為噪點,實現自動濾波。通過實測數據驗證,該方法可有效剔除多波束測深數據的噪點,與人工處理相比,效率提升明顯。
關鍵詞:多波束;噪點;自動濾波;最優參考面
多波束測深系統廣泛應用于海洋測繪、海洋調查、海洋工程建設等領域,可形成高精度、高分辨率的海底地形數據成果。近年來,隨著儀器設備的不斷升級完善、數據處理方法的不斷改進,測深數據的精度和分辨率也越來越高。但由于海洋復雜環境、儀器設備、人為操作不合理等諸多因素影響,多波束測量數據中會出現一定的噪點,噪點呈現出明顯的多源性特點,在進行多波束水深數據處理時,必須進行相應的異常值檢測與剔除,而這也是多波束水深數據業處理中勞動強度最大的部分。
現有的噪點數據處理方法主要有交互式濾波和自動濾波2種,交互式濾波方法耗時較長、效率較低,無法滿足大面積水下地形的數據處理要求。為了減少人工干預、提高工作效率,國內外研究學者提出了多種自動濾波方法,包括基于抗差估計的選權迭代插值比較檢驗法、基于最小二乘支持向量機算法構造海底趨勢面的粗差剔除方法、基于不確定性與測深學聯合估值(combined uncertainty and bathymelry estimator,CUBE)方法、基于中值濾波、局部方差檢驗和小波分析詳解和的方法、基于逆傳播(back propagation,BP)神經網絡的方法等。本文在傳統的趨勢面濾波算法的基礎上,提出一種針對海底不同的地形特點建立最優參考曲面的自動濾波方法,通過最優參考曲面對每個波束點所在位置水深進行精準估計,實現對不同類型海底地形自動濾波處理。
1研究方法
1.1創建基本格網曲面
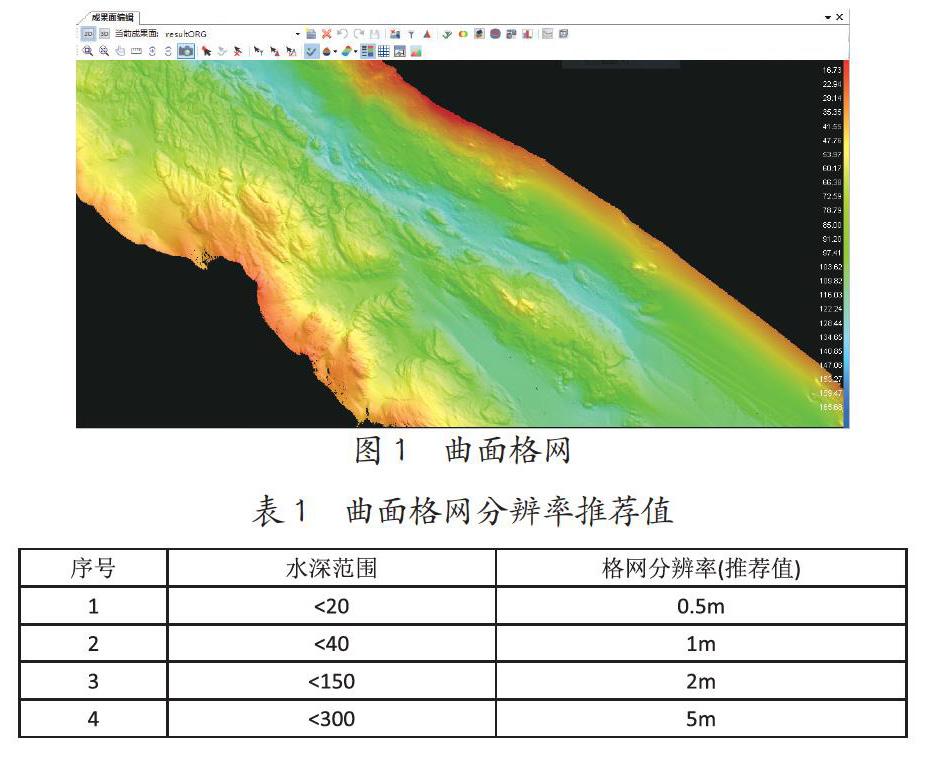
傳統的趨勢面濾波方法是通過多項式擬合得到格網曲面,如圖1所示。本文提出的最優參考曲面也是基于此曲面優化生成的。
在生成格網曲面時,應在保證生成的整個格網曲面連續的情況下,格網分辨率做到盡可能小,分辨率越小,最終成果越準確。常見淺水格網分辨率推薦值見表1。
1.2創建最優參考曲面
由于基本格網曲面是基于未去噪的原始波束點生成的,會有毛刺、坑點等非正常地形形狀,如圖2所示。因此需要對該格網曲面進行優化處理,從而得到更接近真實地形的參考曲面。
假設水下地形是連續可導的,D=f(x,y),D為深度,x和y為平面坐標,生成格網點后的水下地形與柵格圖像類似,所以可以參考柵格圖像的卷積處理,對整個地形區域進行卷積運算,其中,卷積核大小為N*N,滑動步長為1,卷積后網格大小保持不變。
卷積算法可以很好地過濾曲面噪點,從而得到一個最優參考曲面,如圖3所示。經過優化處理計算后,非正常地形得到很好修復。
從斷面視圖角度來看,真實地形、常規格網曲面的表達地形及基于最優參考曲面的估計地形三者相比,基于最優參考曲面的估計地形與真實地形更為接近,如圖4所示,也證明了最優參考曲面比較合理。
1.3基于最優參考曲面進行噪點濾除
建立了最優參考曲面后,就能以此為基準,對原始波束點進行濾波。
如果以某一點P為中心,從不同方向切一個斷面i,假設該點的水深真值D=f(xn,yn)=Di+Adi,Di為該斷面坐標(xn,yn)位置的水深估計值,△di為該斷面水深估計誤差,由于在不同斷面下該點水深應一致,D=DO+△dO=DI+△d1=…=Di+△di,所以可以通過最小二乘法求得當水深估計誤差△di平方和為最小時的深度,來作為水深真值D,其中不同斷面的水深估計值Di可以通過已有的相鄰格網水深值用迭代法求出。
自動濾波時根據IHO S-44精度指標的要求,當波束點水深減去真值超限,即Id-DI>E時進行自動剔除。限差值E如式2所示:
2實測算例
本次實測選擇一塊約16km2的測區,水深為16-150m,測線重疊度約為40%,分別采用人工除噪和自動濾波2種方式處理,所耗時間對比見表3。采用自動濾波方法耗時只占人工處理的1/66,效率提高顯著。
兩者處理后的成果數據復合誤差統計如圖5所示。以人工處理的結果作為真值,分別按照IHO標準、海道測量規范要求和水運工程測量規范要求(見表4)進行統計,自動濾波后輸出的點合格率均在99%以上,證明了該自動濾波方法高效、合理,可替代人工除噪。
3優缺點分析
與手動濾波進行差異分析,本文提出的基于最優參考曲面自動濾波法存在以下優點和不足:
3.1優點
(1)自動濾除噪點不受視角的局限
人工刪除噪點一般是通過切斷面,以地形趨勢判斷是否為噪點,當切的斷面方向和寬度不恰當時,噪點會隱藏在正常地形斷面中,無法甄別并剔除它,因此,人工刪除噪點方法存在一定局限性。而自動濾波顧及了多個方向地形斷面變化趨勢,不受視角的局限,能夠準確識別出并剔除噪點。
如圖6所示,同一份點云數據,按照不同方向切的斷面,只有當斷面切的方向恰當時,圓圈標注的噪點才能被人眼識別出來。如果按照圖6上圖斷面,圓圈標注的噪點就會被漏刪。而采用自動濾波方法,可以很好地剔除這些噪點,效果如圖7所示。
(2)質量差波束點可以得到快速清理
根據測量規范要求,相鄰測線條帶重疊寬度需為不小于20%測線寬度,而在實際作業中,由于受作業環境影響,相鄰測線采集的數據在拼接時會存在誤差,需要取優質的波束點數據,并刪除質量差的波束點,采用人工處理工作量會非常大。采用本文自動濾波方法,可以通過對每個位置的波束點進行精確水深估計,當波束點的水深與估計水深的差值超出允許范圍時,就會被識別為質量差的波束點并進行剔除,從而快速清理重疊區域質量差的波束點。
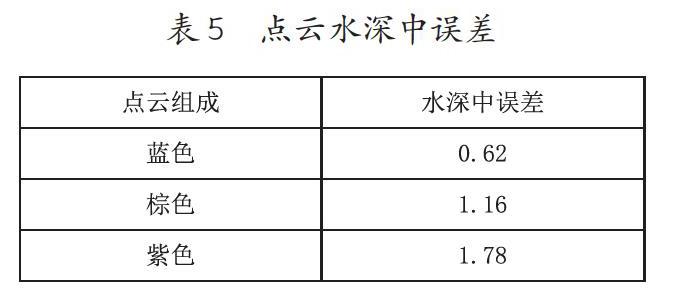
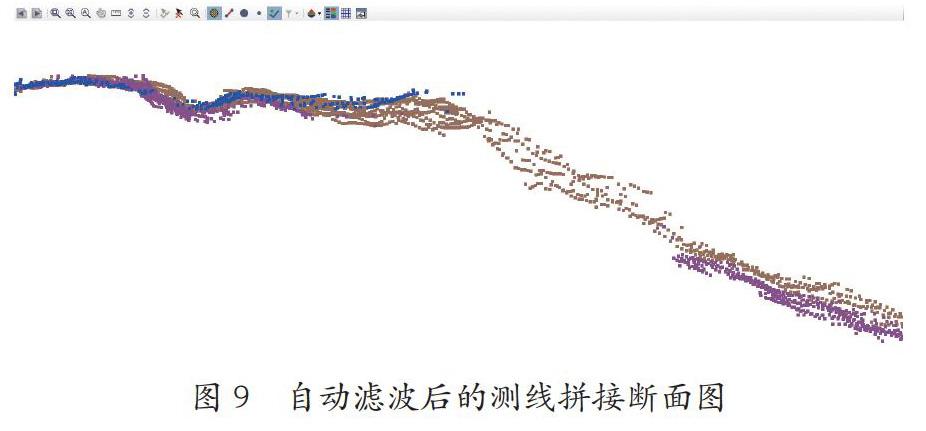
如圖8所示,圓圈標注位置被3條測線波束點所覆蓋,該處平均水深約48m,通過對該拼接處點云中誤差進行分析,可以判定紫色測線圓圈處的波束質量比較差,應當進行剔除,如表5所示。
采用本文自動濾波方法對3條測線進行濾波后的效果如圖9所示,清理后的測線波束點拼接顯得更為合理。
3.2缺點
(1)對部分特殊障礙物的噪點自動化濾波還需人工干預
由于本文自動濾波方法實現的前提條件是水下地形需連續可導,而水下沉船的桅桿、半露出的樹木枝干、斜插的鋼條等特殊障礙物,顯然與水下地形變化不連續,也不可導。自動濾波算法會將這些障礙物對應的部分測線波束點判別為噪點進行濾除,因此還需要人工干預進行波束點恢復操作。
如圖10所示,對沉船進行自動濾波前后進行比較,沉船的主要地理特征會完全保留下來,但部分附著的細小物和船舶結構件會被作為噪點剔除,遇到這種特殊情況,就需要人工介入進行修復。
4結語
本文提出的基于最優參考曲面多波束自動濾波方法,在噪點甄別、重復測線波束點清理等方面較人工處理方式有明顯優勢。尤其是在大面積區域測量作業時,能顯著提高工作效率,實現快速成圖。本方法可廣泛應用于水下地形測量,在障礙物掃測上結合人工干預修復,也可以取得較好成果。
