基于低分辨雷達系統(tǒng)的無人機微多普勒特征分析
2020-11-06 06:01:29李秋菊朱東方
科技創(chuàng)新與應(yīng)用 2020年31期
關(guān)鍵詞:無人機
李秋菊 朱東方


摘 ?要:小型無人機具有體積小、飛行速度慢、飛行高度低的特點,而基于低分辨雷達獲取的回波信號在很短的駐留時間內(nèi)獲得,包含的目標(biāo)信息有限,因此使用低分辨雷達系統(tǒng)對其進行分類是一項具有挑戰(zhàn)性的任務(wù)。文章從微多普勒特征的角度分析了無人機目標(biāo)回波信號,包括對單個旋翼回波建模,多普勒譜和時頻譜的微動特性分布。實測數(shù)據(jù)分析表明,回波信號除包含無人機機身的平動頻率分量,還可觀測到旋翼產(chǎn)生的微多普勒分量。
關(guān)鍵詞:無人機;微多普勒特征;時頻分析;低分辨雷達
中圖分類號:TN957.51 文獻標(biāo)志碼:A ? ? ? ? 文章編號:2095-2945(2020)31-0005-04
Abstract: Small unmanned aerial vehicle(UAV) has the characteristics of small size, slow flight speed and low flight altitude. Based on low-resolution radar, the echo signals contain limited target information under the condition of low range resolution and short dwell time. Therefore, it is a challenging task to realize UAV classification by using low-resolution radar system. In this paper, we analyze the micro-Doppler signature of UAV target, including the echo modeling of single rotor and the micro-motion feature distribution of Doppler spectrum. The measured data analysis shows that the echo signal contains not only the translational frequency component generated by UAV fuselage, but also the micro-Doppler component by rotor.
Keywords: UAV; micro-Doppler signature; Time-Frequency Analysis; low-resolution radar
1 概述
近年來,無人機發(fā)展迅速,為消費者帶來全新體驗的同時,“黑飛”現(xiàn)象也頻繁發(fā)生。無人機可以用于偵察、攻擊,對軍事安全、要地防御、重點設(shè)施防護、民航飛行保障、大型活動安保等帶來了嚴峻挑戰(zhàn)。因此,對無人機必須采取有效的管控與監(jiān)測手段。快速準確的無人機檢測和分類是近年來的研究熱點之一[1,2]。
由于雷達具有全天候快速遙感的能力,雷達技術(shù)已被廣泛應(yīng)用于無人機探測和分類。雷達微多普勒是指在目標(biāo)運動時產(chǎn)生的主多普勒分量之外觀察到的微運動現(xiàn)象。近年來,目標(biāo)微動特性分析引起學(xué)術(shù)界及工程界廣泛關(guān)注及研究。目標(biāo)微運動產(chǎn)生的微多普勒特征包含了目標(biāo)的精細結(jié)構(gòu)和運動細節(jié)等信息,可以從該信號中提取有用信息進行識別。
美國海軍研究實驗室Chen Victor C最早將微運動和微多普勒特征的相關(guān)概念引入到雷達觀測中,對旋轉(zhuǎn)、振動、進動等多種微動形式進行建模分析,闡述了根據(jù)微動特性實現(xiàn)目標(biāo)分類的理論依據(jù),寫了一些人類微多普勒分析領(lǐng)域的重要出版物[3-5];加拿大雷達應(yīng)用與空間防御技術(shù)研究所的Thayaparan等聯(lián)合小波變換與時頻分析,成功獲取了直升機與行人窄帶雷達回波的微動特征[6];國防科技大學(xué)著重對雷達微動目標(biāo)特性進行研究,闡述了窄帶及寬帶雷達中目標(biāo)的微動現(xiàn)象,并介紹了多種微動特征的提取方法[7];西安電子科技大學(xué)劉宏偉、杜蘭等發(fā)表了多篇針對低分辨雷達目標(biāo)分類方法的論文,提取了回波自相關(guān)矩陣的特征值譜特征,綜合了CLEAN技術(shù)與EMD方法,實現(xiàn)了從回波中對微動分量的提取,并將分形理論應(yīng)用于特征提取[8]。以上研究成果表明基于微多普勒特征的雷達目標(biāo)分類方法研究是實際可行的。
本文開展使用低分雷達對無人機目標(biāo)進行微多普勒特性分析,并與非無人機目標(biāo)對比。文章結(jié)構(gòu)如下:第2節(jié)對無人機單個旋翼回波建模,分析旋翼產(chǎn)生微動特性機理。第3節(jié)對實測無人機實測數(shù)據(jù)進行微多普勒分析。第4節(jié)討論了無人機實測數(shù)據(jù)的時頻譜分布。最后第5節(jié)對論文進行了總結(jié)。
2 無人機旋翼建模及分析
無人機目標(biāo)主要包含機身及旋翼兩種部件,如圖1所示。機身平動可視為剛體運動,而由旋翼旋轉(zhuǎn)為非剛體運動。
圖1 無人機典型目標(biāo)
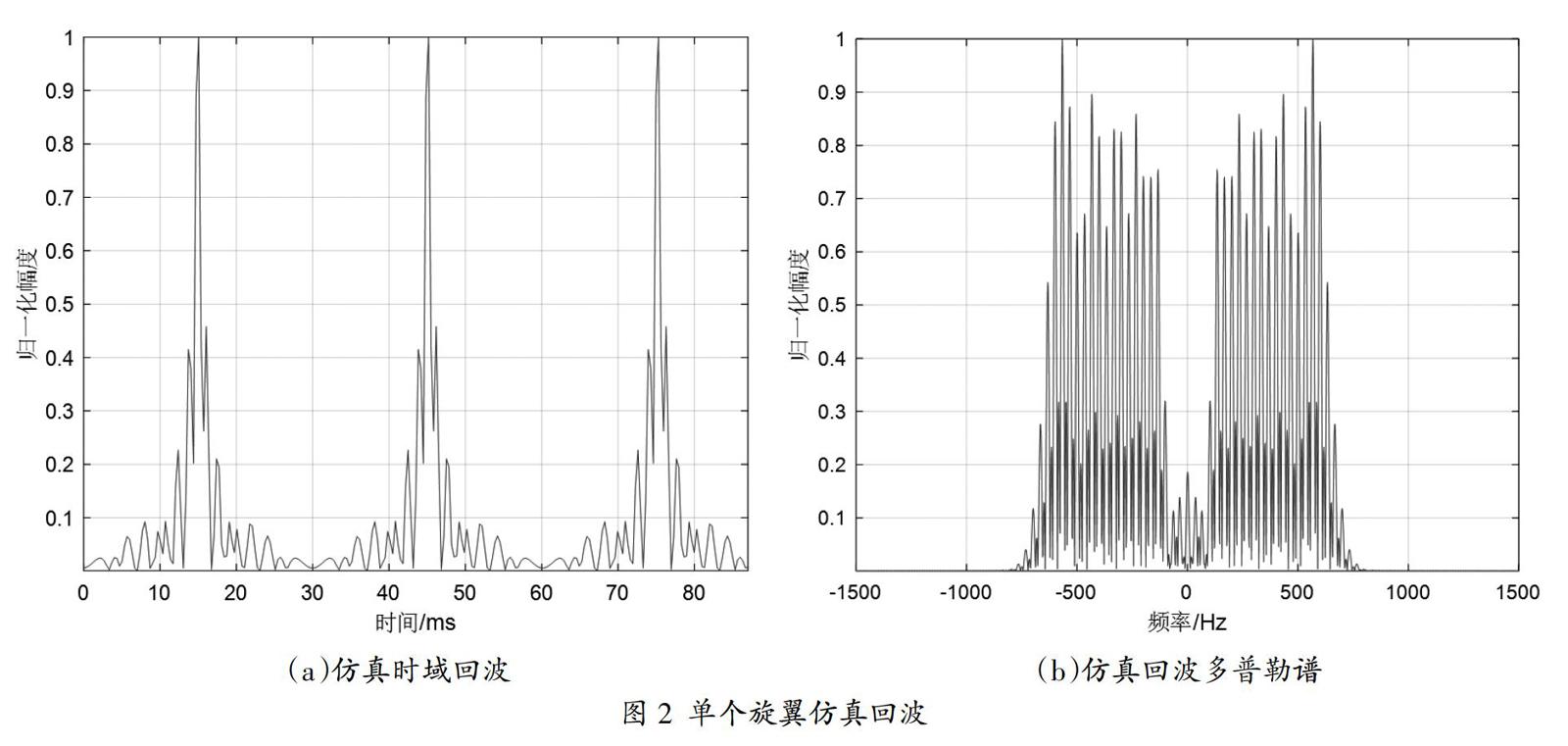
以單個旋翼為例,一個旋翼由多個槳葉葉片組成,每個槳葉可等效為一個條狀散射體。對條狀散射體各點散射回波積分可得單個葉片的散射回波,多個槳葉葉片回波疊加即可得到單個旋翼的回波。低分辨雷達體制下可對單個旋翼回波建模,仿真生成的單個旋翼時域回波及其多普勒譜如圖2所示。
由于旋翼的對稱性結(jié)構(gòu),每旋轉(zhuǎn)至一定角度時,其有效散射截面積(RCS)會達到最大。因此旋翼旋轉(zhuǎn)速度恒定時,其回波幅度表現(xiàn)為在某一時刻出現(xiàn)尖峰,且呈周期性出現(xiàn),其重復(fù)周期與旋翼轉(zhuǎn)速有關(guān)。多普勒譜則表現(xiàn)為呈對稱分布的多條離散譜線。
3 無人機實測數(shù)據(jù)微多普勒特性分析
目標(biāo)的回波含有微動信息,可以進行特征提取與分析,實現(xiàn)目標(biāo)的識別。對于無人機目標(biāo)來說,旋翼轉(zhuǎn)動產(chǎn)生的微多普勒信息,是重要的分類依據(jù)。本節(jié)以無人機實測數(shù)據(jù)展開討論。
用于實驗的是一部脈沖多普勒體制的低分辨雷達系統(tǒng),工作參數(shù)如表1所示。
表1 雷達工作參數(shù)
低分辨雷達系統(tǒng)實現(xiàn)無人機分類并不簡單。除了無人機體積小、飛行速度慢導(dǎo)致回波信號弱之外,由于雷達回波的時間分辨率很低,因此在目標(biāo)上駐留時間很短,可獲取用于分類的微動信息有限。圖3給出無人機懸停,慢速等多種運動場景下的雷達回波實測數(shù)據(jù)。
在數(shù)據(jù)采集實驗中,雷達一個相關(guān)處理間隔(CPI)的脈沖積累數(shù)為256,稱為一幀。在得到無人機目標(biāo)的雷達回波后,一幀的各個脈沖間包含了目標(biāo)的多普勒信息,對這256點信號進行傅里葉變換,就可以得到目標(biāo)的多普勒譜。其中圖3場景(c)為無人機目標(biāo)先是處于懸停狀態(tài),機身多普勒頻率位于零頻率軸,后逼近雷達運動,機身多普勒頻率移于正頻率軸,雷達連續(xù)觀測了目標(biāo)的整個運動過程。同樣場景(d)為無人機目標(biāo)先處于懸停狀態(tài),后背離雷達運動。同時,每個場景我們都可觀測到無人機機身主多普勒頻率兩側(cè)的多條離散譜線。
目標(biāo)的多普勒譜反應(yīng)了目標(biāo)的主體平動和微運動信息,我們正是利用這樣的信息來對目標(biāo)進行分類。圖4給出無人機在懸停和運動狀態(tài)下的實測數(shù)據(jù)單幀多普勒譜。可以看出,多普勒譜的峰值頻率對應(yīng)無人機平動速度,峰值兩側(cè)的若干個小尖峰,則對應(yīng)無人機旋翼轉(zhuǎn)動產(chǎn)生的微動分量。
然而實際情況中,旋翼分量并不能總是被雷達觀測到,如圖5所示。無人機目標(biāo)體積小使得RCS小,常導(dǎo)致回波的微動分量微弱,另外若目標(biāo)速度過慢,也可能會導(dǎo)致雜波與目標(biāo)回波發(fā)生重合,對后面的分析產(chǎn)生影響。缺失重要的微動信息或者微動信息較弱,將會對無人機的高性能分類帶來挑戰(zhàn)。
時頻分析可以顯示信號瞬時頻率隨時間的變化規(guī)律,可有效顯示和分析目標(biāo)的微多普勒特性。圖6給出無人機目標(biāo)在懸停和運動狀態(tài)下的時頻圖,用短時傅里葉變換獲得。我們同樣可以觀測,無人機平動速度產(chǎn)生的頻譜對應(yīng)圖中的峰值頻率,峰值上下側(cè)的離散譜線則對應(yīng)無人機旋翼轉(zhuǎn)動產(chǎn)生的微動分量。
在圖6實測數(shù)據(jù)基礎(chǔ)上還應(yīng)進行雜波抑制和去噪等預(yù)處理,可保證在后續(xù)特征提取和目標(biāo)分類時,使得微動分量不被噪聲和雜波等無用信號影響。
4 結(jié)束語
在本文中,我們介紹了基于低分辨雷達系統(tǒng)生成的無人機實測數(shù)據(jù)的分析,包含無人機身平動分量,旋翼微多普勒分量,及噪聲等無用分量,重點針對旋翼轉(zhuǎn)動的微動特性進行建模和實測數(shù)據(jù)對比。分析表明,無人機回波信號的多普勒譜和時頻譜均可觀測到旋翼轉(zhuǎn)動產(chǎn)生的微多普勒分量。根據(jù)上述討論我們可知無人機的微多普勒調(diào)制特點,從而對無人機目標(biāo)實行進一步的特征提取和分類。
參考文獻:
[1]Jianfeng Ren, Xudong Jiang. Regularized 2-D complex-log spectral analysis and subspace reliability analysis of micro-Doppler signature for UAV detection[J]. Pattern Recognition, 2017, 69:225-237.
[2]Beom-Seok Oh , Xin Guo, Fangyuan Wan, Kar-Ann Toh, and Zhiping Lin. Micro-Doppler Mini-UAV Classification Using Empirical-Mode Decomposition Features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(2):227-231.
[3]Al-Ashwal, W.A., Baker, C.J., Balleri, A., et al.Statistical analysis of simultaneous monostatic and bistatic sea clutter at low grazing angles[J]. Electron.Lett., 2011, 47 (10): 621-622.
[4]Chen, V.C., Fayin, L., Ho, S.S., Wechsler, H.: Micro-Doppler effect in radar: phenomenon, model, and simulation study[J]. IEEE Trans. Aerosp. Electron. Syst., 2006,42(1):2-21.
[5]Chen, V.C.: The micro-Doppler effect in radar[M].Artech House, 2011.
[6]Thayapaparan T, Abrol S, Qian S. Analysis of radar micro-Doppler signatures from experimental helicopter and human data[J]. IEE Proceedings on Radar, Sonar and Navigation,2007,1(4):289-299.
[7]金光虎.中斷彈道目標(biāo)ISAR成像及物理特性反演技術(shù)研究[D].長沙:國防科技大學(xué),2009:94-120.
[8]李彥兵,杜蘭,劉宏偉,等.基于微多普勒特征的地面目標(biāo)分類[J].電子與信息學(xué)報,2010,32(12):641-648.
猜你喜歡
電腦知識與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(2016年9期)2016-05-26 20:58:26
