PID控制在水電廠有功調節的應用
2020-11-06 22:13:22周小成
中國電氣工程學報 2020年16期
關鍵詞:應用
周小成
摘要:本文主要討論了PID控制在自動發電控制(AGC)和水輪機調速器中的應用,簡要分析了調速器死區產生的原因及影響,重點闡述了脈沖調節及PID控制在水電站有功調節的具體實現方式。并針對大容量機組的負荷調節死區產生的負荷偏差提出優化解決方案,以及機組出力優化前后的對比。
關鍵詞:PID控制;水電廠;調節;應用
引言
水電站在電網生產運行中發揮防洪灌溉、調峰調頻的重大作用,對全廠有功調節進行優化以提高資源利用效率至關重要,然而由于水電廠功率調節速度快,出力能在短時間大幅度增減,容易給電網造成安全隱患。因此必須利用高效PID控制策略對各機組出力、負荷分配、運行方式、全廠功率等參數進行處理,合理進行流域梯級水庫和發電生產,盡量避免棄水現象的發生。
一、 PID 控制在水輪機調速器中的應用及死區的影響
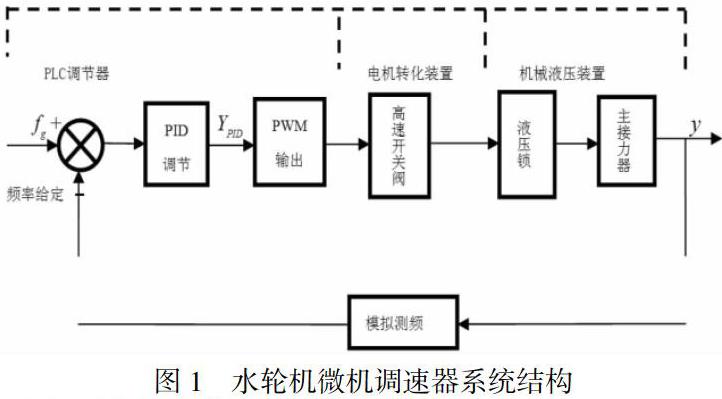
水輪機調速器是水電站核心控制設備之一,它與計算機監控系統相配合,承擔著機組導葉開度、機組頻率、機組功率等控制任務,簡單的水輪機微機調速器系統結構如圖 1 所示。PLC調節器經過 PID運算輸出脈沖序列,經過放大后作為開關閥的輸入信號,但是開關閥只有開啟和關閉兩種狀態,輸出的流量是斷續的,這時需采用 PWM控制技術控制高速開關閥,讓其輸出連續的流量信號并進入接力器,從而控制接力器的位移,反饋信號則取自接力器位移,經過 V/F 轉換成頻率信號再次輸入PLC,與運算值進行綜合比較,達到調節導葉開度的目的。
目前,國際和國內的數字式調試器都是基于 PID或以 PID為基礎的適應性變參數調整規律。由于水流貫性時間常數、水頭的變化、尾水的波動以及蝸殼中不均勻流場引起的脈動,水輪機微機調速器出現導葉開度調整不到位的情況,也就是導葉開度控制死區。死區如果過大,實質就是理論和自動控制的失效,具體表現為機組頻率擺動過大,主配抽動劇烈,壓油泵啟動頻繁,管路振動,難于并網等。當然死區也不是越小越好,過于精準可能會使得主配壓閥非常靈敏,這對系統未必是好事。事實上,系統中如果存在一定的死區,在動態調節過程中,該死區會存在于整個調節過程中,使得導葉反饋曲線和給定曲線并不完全一致,且形成一個相對平緩的調節過渡過程,這對有效抑制機組慣性造成的頻率反饋滯后是非常有利的。
二、電網對水電機組PID功率調節的要求
電網對水電機組PID功率調節的要求:在機組功率調節過程中,保證安全、平滑、快速地將機組有、無功負荷調整到設定的目標值;不出現超調與調節振蕩;能保證機組的各項參數在允許的功偏差值內運行。安全是指在調節過程中機組的各項參數不能超出安全范圍;平滑是指調節時機組功率不要出現大的超調;快速是指機組能較快地響應功率設定,在調速系統安全允許的情況下,盡快的將實發值調節
至目標值死區范圍內。
三、PID功率調節程序的保護與閉鎖條件
PID調節算法本身可以計算出功率調節控制的脈寬,但并不能保證調節的安全,所以在調節程序算法的外圍設計了相應的閉鎖和保護程序,保證調節的安全。保護和閉鎖是兩個不同的概念,程序的具體實現方法也不相同。功率調節閉鎖是指當某項電氣量達到閉鎖限定值時,功率調節程序就將相應的輸出閉鎖,禁止其輸出;調節程序繼續執行,一旦閉鎖電氣量條件恢復到正常值時,調節程序就自動解除其相應的輸出閉鎖,允許其輸出。而調節保護是指邊界條件達到保護限定值時,整個功率調節程序退出。
1.PID功率調節保護
(1)PID功率調節超時保護。超時保護是指在經過長時間對機組有功或無功功率進行調節后仍未進人設定值范圍,說明PID調節程序某-環節出現問題,調節程序自動退出,需要運行人員進行千預處理。
(2)PID功率調節負荷差保護。負荷差保護是指PID調節程序下發一次調節脈沖前后功率差過大時,調節程序自動退出。調節程序需要滿足安全平滑的調節要求,因此正常的調節過程不應出現功率突變的現象,一旦功率突變則說明PID調節某環節出現問題,應將調節程序退出運行。
(3)PID功率調節頻率保護。頻率保護是指頻率高于一定限值時調節程序自動退出。正常情況下機組并網后其頻率應相對穩定,如果發生頻率過高說明機組可能已脫離電網或電網自身有重大事故,這時需將調節程序退出。
2.PID功率調節閉鎖
機組在并網運行中各電氣參數必須在規程規定的限定值內運行,以保證機組的安全穩定及經濟運行。因此,在PID調節程序中設置了電氣量閉鎖,分述如下:
(1)定子電流上限閉鎖定子電流上限閉鎖,閉鎖有功、無功增調節。防止機組定子過流引起機組定子溫度過高。
(2)轉子電壓上、下限閉鎖轉子電壓上、下限閉鎖,閉鎖無功增、或調節。
(3)定子電壓上、下限閉鎖,定子電壓上、下限閉鎖,閉鎖無功增減調節。
在水電機組中,有的機組因水輪機效率特性運行中的機組振動與汽蝕水頭變化等因素的影響,要求水輪機的導葉開度在規定的邊界條件下運行,以保證水輪機的安全穩定運行。因此,有些水電機組的PID調節程序還設置了導葉開度閉鎖用以閉鎖有功功率。
四、PID調節在電廠AGC中應用
從水電機組快速開、停機,增減負荷的要求上看,優先采用比例控制是非常合理和科學的。根據設定負荷和實際負荷的差值,通過監控系統機組現地控制單元(LCU)的PID控制程序來進行閉環控制調節。具體對PID控制器而言,
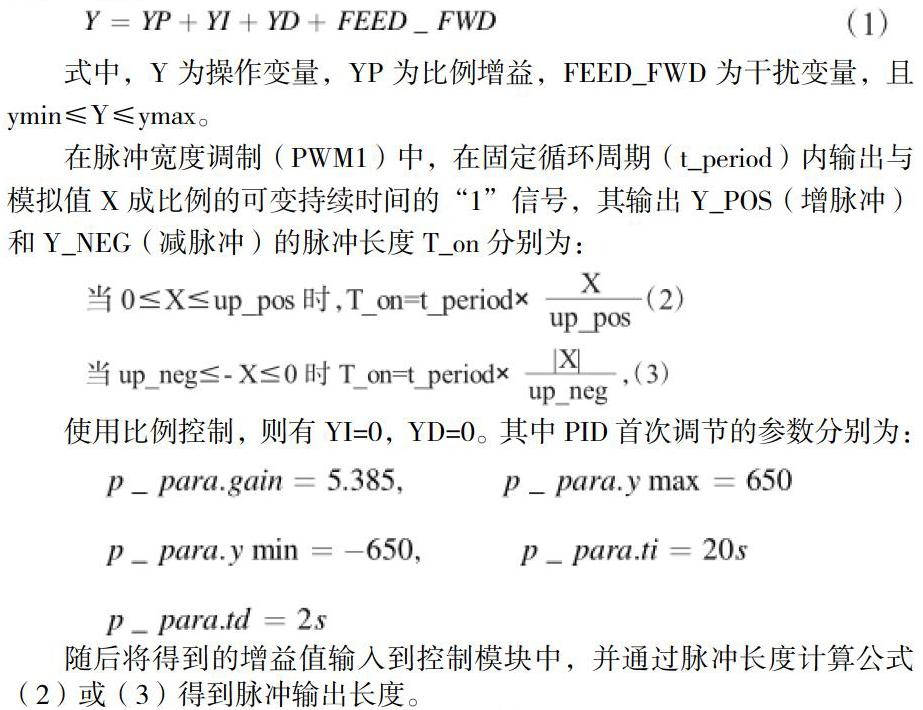
在脈沖寬度調制(PWM1)中,在固定循環周期(t_period)內輸出與模擬值X成比例的可變持續時間的“1”信號,其輸出Y_POS(增脈沖)和Y_NEG(減脈沖)的脈沖長度T_on分別為:
使用比例控制,則有YI=0,YD=0。其中PID首次調節的參數分別為:
隨后將得到的增益值輸入到控制模塊中,并通過脈沖長度計算公式(2)或(3)得到脈沖輸出長度。
五、有功調節存在的問題及原因分析
由于死區的存在,全廠有功出力實發值存在無法達到調度下發設定值的情況,偏差可能較大,有功出力調節不夠精確。所以急需對監控系統有功出力調節策略進行優化,使全廠出力實發值達到調度下發的設定值。由于機組有功功率采用有功PID調節模塊調節,根據調度下達的全廠有功出力設定值,分配至各臺機組有功PID的調節變化量不確定。機組有功PID在小幅調節時的調節能力較差,造成機組有功出力實發值低于有功設定值的情況,從而導致全廠機組實際出力值低于設定值。當機組有功PID調節到位后若有功實發值低于有功設定值,則多發一次增有功脈沖,使有功實發值達到有功設定值。同時,兼顧PID與一次調頻的協調關系,僅在一次調頻未動作的情況下生效,避免干擾機組一次調頻正確動作。
結束語
在發電機組的AGC有功調節過程中,水輪機組在某些負荷區域運行時會產生較大振動,也就是通常說的振動區,個別機組的振動區甚至出現在機組的高效率區,而這會大大影響機組的安全穩定和使用壽命。因此必須合理進行有功調節及分配,將機組的運行調整在合理的區間,避開機組的振動區域,使機組有良好的工況,更好的執行電網的負荷需求。
參考文獻
[1]王定一,伍永剛.水電廠用計算機實現自動發電控制的經濟效益[J].水力發電,1994(1):17-49.
猜你喜歡
科技視界(2016年21期)2016-10-17 19:54:47
科技視界(2016年21期)2016-10-17 19:54:05
科技視界(2016年21期)2016-10-17 18:46:46
科技視界(2016年21期)2016-10-17 18:37:58
科技視界(2016年21期)2016-10-17 18:28:05
考試周刊(2016年76期)2016-10-09 08:45:44
大學教育(2016年9期)2016-10-09 08:28:55
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01