用于飛機牽引車上的全方位主動安全防護系統
2020-11-08 04:56:20王大鵬惠釗蒙松暢科劍李博
科學導報·學術 2020年84期
關鍵詞:設計
王大鵬 惠釗 蒙松 暢科劍 李博
【關鍵詞】飛機牽引車、全方位、安全防護系統、設計
Key words:Aircraft tractor,All-round,Safety protection system,design
對于飛機牽引車的制造,查閱《民用機場專用設備安全管理規定》和《飛機牽引車檢測規范》等規范資料,同時通過查閱市場上的飛機牽引車相關產品技術資料,雖然對設備安全提出了明確要求,但是相關的標準、檢測辦法及產品技術資料里并沒有對設備提出相關的“牽引車具有周圍人員、設備、物資主動檢測與防撞保護”的具體要求。但是,飛機牽引車在實際使用中,由于故障或操作失誤而引發的對設備、物資、人員傷害的安全事故時有發生,有些甚至釀成人員傷亡的重大安全事故。
針對上述問題,目前有一種基于激光雷達的智能車防撞系統及方法,采用單線或多線的基于飛行時間原理的激光雷達(TOF或者360度范圍掃描),在單一層面或者多層面進行掃描,確定周圍環境物體的位置數據并對障礙物進行識別和避障。也有用一種機場地面飛機自動智能牽引系統及方法,“無人牽引車上還設置有激光雷達避碰系統、視覺識別系統和導航定位系統,工控機根據激光雷達避碰系統的反饋信息,控制無人牽引車避免與障礙物發生碰撞;視覺識別系統用于識別障礙物和記錄無人牽引車的行駛圖像,以及通過所述通訊系統將記錄的行駛圖像數據發送至所述調度中心;所述工控機通過將所述局域GPS/北斗雙模差分定位模塊和所述慣性導航模塊的定位數據進行數據融合,實現對無人牽引車的液壓夾持裝置的準確定位。
上述方法雖然在一定程度上實現對周圍環境的掃描,防止車輛發生碰撞等安全事故,但是這些技術方案均不能實現對車輛四周的全方位立體掃描,存在掃描盲區,只能掃描到對應平面的障礙物,掃描區域局限性較大,仍然不能完全確保車輛的的行駛安全。另外,飛機牽引車的抱輪機構在與飛機起落架的飛機輪胎進行對接時,牽引車自身沒有對該工作過程進行全方位的監測裝置,不能更好更快速的保證抱輪機構與飛機起落架的飛機輪胎的準確對接,容易造成飛機起落架的飛機輪胎和牽引車的抱輪機構的相互碰撞,特別是容易造成飛機部件的損害及報廢。因此有必要進一步改進。
目前擬解決的技術問題:提供一種用于飛機牽引車上的全方位主動安全防護系統,擬采用激光雷達和VOS智能視覺傳感器結合用于飛機牽引車牽引飛機行駛、以及與飛機起落架對接抱輪操作的安全防護措施,對飛機牽引車安全進行主動防護,確保在人為操作失誤或設備故障的情況下充分提升飛機牽引車運行過程中對周圍環境的識別和防撞保護能力,確保人員、設備、物資的安全。
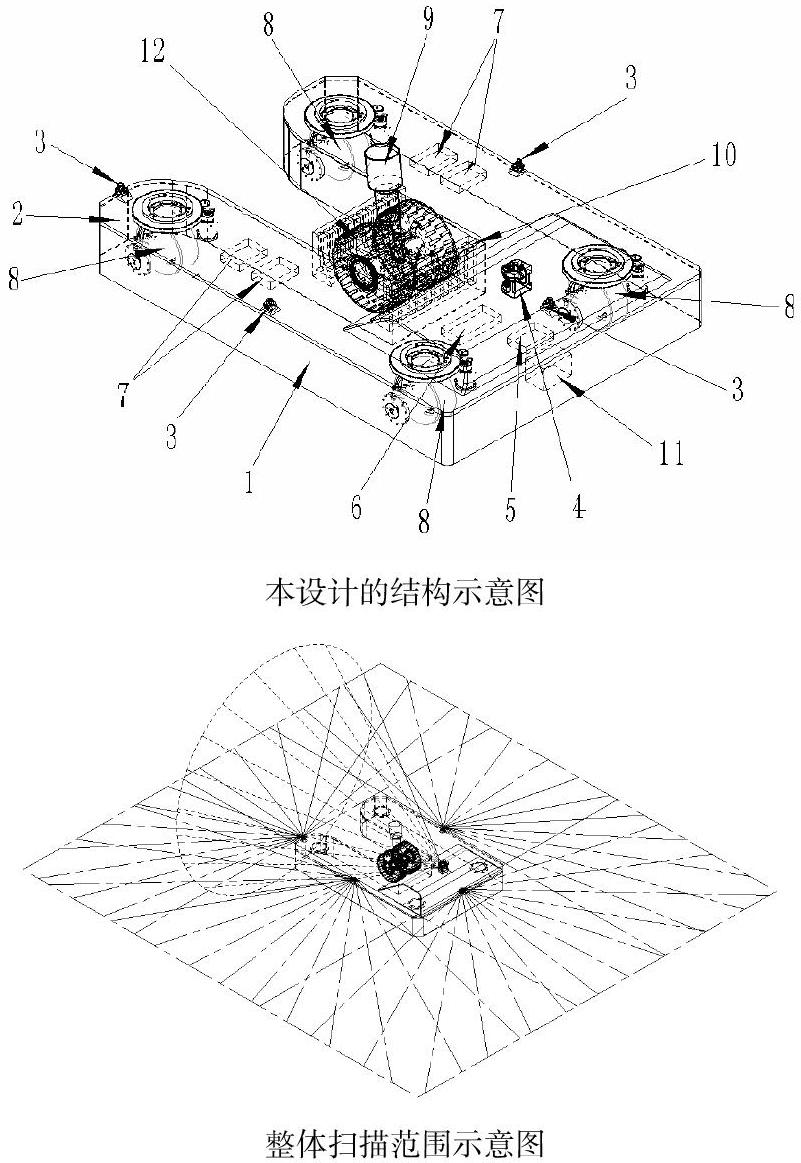
設計一個技術方案:用于飛機牽引車上的全方位主動安全防護系統,具有飛機牽引車,設定飛機牽引車包括車體,車體上設有車輛主控制器,下部前后均設有驅動單元,有控制驅動單元的驅動控制器,驅動控制器與車輛主控制器電連接;車體中部設有與飛機起落架的飛機輪胎進行對接的抱輪機構,車體上設有用于控制抱輪機構的動力單元,動力單元與車輛主控制器電連接;車體上設有車載數據處理器,所述車載數據處理器與車輛主控制器電連接;
車體四周設有多個對車體周圍進行全方位三維立體掃描的激光雷達,該激光雷達與車載數據處理器電連接,激光雷達監測數據通過車載數據處理器分析處理后發往車輛主控制器,車輛主控制器根據車載數據處理器發送的指令通過驅動控制器控制驅動單元實現主動避讓保護動作;
車體上部設有可對車體周圍物體進行三維立體成像掃描而消除激光雷達掃描盲區并能對飛機起落架的飛機輪胎和飛機牽引車的抱輪機構對接情況進行監測的VOS智能視覺傳感器,該VOS智能視覺傳感器與車載數據處理器電連接,VOS智能視覺傳感器的監測數據通過車載數據處理器分析處理后發往車輛主控制器,車輛主控制器根據車載數據處理器發送的指令通過動力單元控制抱輪機構和飛機起落架的飛機輪胎準確對接。
對上述技術方案進一步限定,多個所述激光雷達分別布置于車體的前后側和左右兩側,激光雷達采用布置在車體對應側面上部且斜向下掃描、布置在車體對應側面底部且斜向上掃描、或者兩種方式組合布置、或者與水平掃描組合布置。激光雷達的有效掃描范圍最大為180°扇形面積內,有效掃描范圍通過車載數據處理器設置后刪除多余部分。
進一步限定,該VOS智能視覺傳感器的視角范圍為以VOS智能視覺傳感器的信號發射口為中心的錐形范圍;錐形范圍的頂部中心角可根據飛機牽引車的尺寸大小進行調整以滿足飛機牽引車和飛機起落架對接時使錐形范圍掃描覆蓋飛機起落架的足夠范圍以滿足數據分析計算需要;VOS智能視覺傳感器的方向可設為固定,VOS智能視覺傳感器的方向也可隨著飛機牽引車的行進方向進行旋轉以滿足補償飛機牽引車行駛方向激光雷達掃描范圍盲區補償的需求。VOS智能視覺傳感器的錐形范圍通過車載數據處理器進行限制消除。
本設計與現有技術相比的優點:
1、本方案用于飛機牽引車牽引飛機行駛、以及與飛機起落架對接抱輪操作的安全防護措施,對飛機牽引車安全進行主動防護,確保在人為操作失誤或設備故障的情況下充分提升飛機牽引車運行過程中對周圍環境的識別和防撞保護能力,確保人員、設備、物資的安全;
2、本方案在車體周圍傾斜布置多個激光雷達,能夠對車體周圍進行全封閉立體掃描,同時采用VOS智能視覺傳感器進行激光雷達的掃描區域補償,實現車輛四周方向的全范圍立體掃描、障礙物識別和防撞避障保護,有效消除了激光雷達平面(單層、多層)只能掃描到對應平面的障礙物的掃描區域局限,確保車輛主動防護范圍無盲區,安裝調試、數據處理簡單;
3、本方案還可采用VOS智能視覺傳感器對物體進行三維立體成像,可準確測量飛機牽引車與飛機起落架對接時的角度、距離、偏移量,通過與控制系統、驅動單元連接,通過三維數據分析計算可實現飛機牽引車與飛機起落架的準確對接,實現在飛機牽引車與飛機起落架對接、抱輪操作過程接觸時的防撞保護,避免人工觀察造成飛機牽引車抱輪機構在對接、夾抱輪胎時對起落架和輪胎造成損傷,提高作業安全性和效率。
用于飛機牽引車上的全方位主動安全防護系統,屬于飛機牽引車技術領域,在車體周圍布置多個激光雷達,對車體周圍進行全封閉立體掃描,同時采用VOS智能視覺傳感器進行激光雷達掃描區域補償,實現車輛四周方向的全范圍立體掃描、障礙物識別和防撞避障保護,有效消除激光雷達只能掃描到對應平面的障礙物的掃描區域局限,確保車輛主動防護范圍無盲區。采用VOS智能視覺傳感器對物體進行三維立體成像,能夠準確測量飛機牽引車與飛機起落架對接時的角度、距離、偏移量,實現飛機牽引車與飛機起落架對接、抱輪操作過程接觸時的防撞保護,避免人工觀察造成飛機牽引車抱輪機構在對接、夾抱輪胎時對起落架和輪胎造成損傷,提高作業安全性和效率。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04